
国際特許分類[G01P3/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 電気的または磁気的手段の使用によって特徴づけられた装置 (1,301)
国際特許分類[G01P3/42]の下位に属する分類
国際特許分類[G01P3/42]に分類される特許
41 - 50 / 106
回転情報算出装置、ステアリング装置及び電動パワーステアリング装置
【課題】3相の磁気検出器の磁気検出信号の異常を検出することが可能であり、異常発生後も、3相中の2相の磁気検出信号が正常な場合に、継続して回転情報の計算を正確に行うことが可能な回転情報算出装置を提供する。
【解決手段】3相の磁気検出信号のサンプリング値a、b、cを取得し、取得したサンプリング値に基づいて、各相に対する回転角度位置を算出する。そして、これら算出した回転角度位置に基づき各相のサンプリング値の異常を検出するとともに、1相のサンプリング値のみに異常が検出されたときは、異常検出フラグを出力すると共に残りの2相のサンプリング値で回転角度位置の算出を行う。2相以上のサンプリング値の異常が検出されたときは、回転情報算出装置の動作を停止する。また、正常な相のサンプリング値に基づいて算出した回転角度位置の平均値を出力用の回転角度位置として算出する。
(もっと読む)
回転速度検出装置

【課題】磁性回転体の磁化によるノイズを検出できる回転速度検出装置を提供すること。
【解決手段】磁性回転体12の回転に伴う磁束変化に応じた電気信号を生成し、電気信号に基づいて磁性回転体12の回転速度を検出する回転速度検出装置20において、電気信号の振動中心Cの揺動幅ΔCが閾値を超えると、電気信号にノイズが重畳されていると判別するノイズ判別手段31を備える。
(もっと読む)
車速センサの故障判定装置及び故障判定方法
【課題】車速センサのフェイルの誤判定を防止して車速センサの故障判定の信頼性向上を図る。
【解決手段】車輪回転速度を検出する車輪速センサ13,14と、車両の駆動軸4の回転速度から車両の走行速度を検出する車速センサ15と、車輪速センサ13,14と車速センサ15とから得られた情報に基づき車速センサ15の故障を判定する故障判定手段10と、車輪回転速度を制御することで車両の挙動を制御する車両挙動制御手段とをそなえ、故障判定手段10は、車輪速センサ13,14が正常、車輪速センサ13,14から得られる車速と車速センサ15で得られる車速との差の絶対値が所定値以上、車両挙動制御手段が非作動中という各条件が全て成立し、且つ全条件の成立が所定時間継続すると車速センサ15が故障していると判定するように構成する。
(もっと読む)
回転検出センサ
【課題】回転体の回転速度に依存されることなく、センサの異常を当該センサ自身により検出して出力することが可能な回転検出センサを提供する。
【解決手段】回転体30の回転に応じてそれぞれパルス状の回転検出信号S1、S2を出力する2つの回転検出部1と、回転検出部1からそれぞれ出力される2相の回転検出信号S1、S2に基づいて、回転体30の回転方向を検出する回転方向検出部4と、回転検出部1の異常を検出する異常検出部6と、回転検出部1が正常な場合には、回転体30の回転方向及び回転速度を示すパルス状の第1出力信号及び第2出力信号を生成して出力し、回転検出部1の一方が異常である場合は、第1出力信号及び第2出力信号とは異なるパルス形状を有し、異常状態及び回転体30の回転速度を示す第3出力信号を生成して出力する信号処理部8と、を備える。
(もっと読む)
モータの回転速度算出方法及びワイパ装置
【課題】コストアップやモータの全体的な制御精度の低下を招来することなく、モータ低速域における速度検出精度を向上させる。
【解決手段】ワイパ装置1は、MRセンサ22a,22bの検出値をデジタル値に変換したAD値に基づいてアーム速度(モータ回転速度)を算出しモータ3a,3bの駆動制御を行う。制御マイコン5a,5bは、過去のAD値と現在のAD値とを比較し、両者の差が所定値を超えている場合のみアーム速度を算出する。すなわち、AD値を得た場合には、AD変換インターバル時間の積算値を求めると共に(S2)、AD値の変化量を算出する(S3)。AD値の変化量と所定の閾値とを比較し(S4)、AD値変化量が閾値を超えている場合には、AD値変化量とAD変換インターバル時間の積算値とから、アーム速度を算出し(S5)、その値に基づいてモータの駆動制御を行う。
(もっと読む)
検出装置および方法、プログラム、並びに記録媒体
【課題】物体の落下の速度に拘わらず物体の落下を確実に抑制することができるようにする。
【解決手段】複数のセンサエレメント52で構成される圧力センサを備える検出装置において、センサエレメント52により検出された圧力値を用いて、圧力中心演算部122により圧力中心位置を演算する。圧力中心速度演算部123は、圧力中心演算部122により演算された圧力中心位置の時間変化を用いて、圧力中心位置の速度を演算する。滑り検出部124は、圧力中心速度演算部123により演算された圧力中心速度に基づいて、滑りを検出する。
(もっと読む)
距離計算を含むヒトの行動モニタ装置
ヒトの行動をモニタする方法が、少なくとも1個所は脚部でない人体の複数の個所の1つに設置される慣性センサを使用して加速度をモニタする段階を含む。この加速度に基づいて複数のステップがカウントされる。複数のステップの歩行特性が求められる。この歩行特性を使用して歩幅が求められる。歩幅に基づいて、移動距離及び移動速度の少なくとも一方が求められる。 (もっと読む)
電動パワーステアリング装置
【課題】車両の速度を検出する検出手段に異常が発生した場合に、電動パワーステアリング装置内で車両の速度を推定すること。
【解決手段】電動パワーステアリングを制御するMCU100は、車速推定モジュール260を備える。トルクセンサ41によって検出される車両の振動は、車速推定モジュール260のレベルリミッタ261で振動レベルが制限された後、FFT処理部262で処理される。そして、車速推定部263は、FFT処理されることによって得られた車両の振動の周波数特性に基づいて車両の速度を推定する。
(もっと読む)
回転速度検出バックアップ装置
【課題】2つの回転速度センサから得られる回転速度の内で高い方を用いてエンジン制御を実行する回転速度検出バックアップ装置にて制御の不安定化を招きにくくする。
【解決手段】入力側回転速度NPにオフセット後タービン回転速度NToffsetが近づく場合には減少オフセットDが増加される。このため入力側回転速度センサの故障でもないのにオフセット後タービン回転速度NToffsetが入力側回転速度NPを越えるのを防止できる。常に減少オフセットDを大きくする場合に比較して、入力側回転速度センサの故障時に入力側回転速度NPからオフセット後タービン回転速度NToffsetへ切り替えても大きな回転速度の落差を生じにくくなる。こうして入力側回転速度センサの正常時に入力側回転速度NPを制御用入力側回転速度NPaに設定でき、故障時に大きな回転速度の落差が生じにくい。このことからエンジン制御の安定性を維持できる。
(もっと読む)
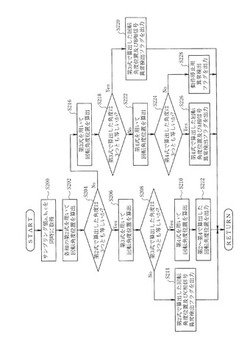
車速算出装置及び車速算出システム
【課題】二輪車の車速を高精度に算出する車速算出装置及び車速算出システムを提供する。
【解決手段】二輪車の車速SPDを算出するECU10(車速算出装置)において、
二輪車のタイヤの回転速度NWを算出する回転速度算出手段(S100)と、タイヤの径方向寸法に関連する径寸法情報(サスペンションのストローク量)を取得する径寸法取得手段(S40)と、回転速度算出手段により算出された回転速度NW、及び径寸法取得手段により取得された径寸法情報StFr,StRrに基づき車速SPDを算出する車速算出手段(S120)と、を備える。これによれば、タイヤの径方向の圧縮潰れ量を加味して車速SPDが算出されるので、二輪車の車速を高精度に算出できる。
(もっと読む)
41 - 50 / 106
[ Back to top ]