
国際特許分類[G01P3/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 電気的または磁気的手段の使用によって特徴づけられた装置 (1,301)
国際特許分類[G01P3/42]の下位に属する分類
国際特許分類[G01P3/42]に分類される特許
21 - 30 / 106
センサ装置
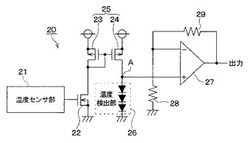
【課題】物理量を検出するセンサの出力に含まれる温度特性の2次の成分を精度良く補正することができるセンサ装置を提供する。
【解決手段】物理量センサ部の温度特性を補正するオフセット温度特性調整部20として、物理量センサ部が受ける温度に対して1次の温度特性成分を含んだ出力を生成する温度センサ部21と、当該物理量センサ部30が受ける温度に応じた温度特性に従って、温度センサ部21で生成された1次の温度特性成分の出力の傾きが0から大きくなるほど、2次の温度特性成分の曲がりが0から大きくなる当該2次の温度特性成分を生じさせる温度検出部26と、を備えた構成とする。
(もっと読む)
車両の制御装置

【課題】動力源のギヤを解した回転数を算出する際において、ギヤ間のバックラッシの影響を排除して正確な回転数を算出することが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、動力源より少なくとも1つ以上のギヤを介して動力が出力される車両に適用される。車両の制御装置は、例えばECUであり、回転数算出手段及び変動抑制手段として機能する。回転数算出手段は、動力源の回転数を基に、動力源のギヤを介したギヤ回転数を算出する。変動抑制手段は、回転数算出手段により算出されたギヤ回転数を基に、ギヤ回転数の変動抑制された値を算出し、ギヤ間のバックラッシによるギヤ回転数の変動が発生する場合には、変動抑制の度合いを大きくする。このようにすることで、ギヤ間のバックラッシによる回転数の変動が発生した場合であっても、当該バックラッシによる影響を排除してギヤ回転数を正確に求めることができる。
(もっと読む)
回転体検知装置及び画像形成装置
【課題】 感光ドラム等の回転体の回転状態を検知する回転検知装置に異常が発生した場合、その異常原因を特定すること。
【解決手段】 回転検知装置に異常が発生した場合、感光ドラム11を回転させた状態で第1のエンコーダセンサ112及び第2のエンコーダセンサ113から出力される信号に基づき、エンコーダホイール111、第1のエンコーダセンサ112、及び第2のエンコーダセンサ113のいずれに異常が発生したのかを特定する。
(もっと読む)
センサ装置
【課題】固定側センサ部上における可動側センサ部の移動を静電的に検出するセンサ装置を提供する。
【解決手段】センサ装置においては、第1基板上に第1の配列パターンを有する第1の電極部が形成され、前記第1の基板の走行に伴い第1の基板に対向される第2の基板上には、第2の配列パターンを有する第2の電極部が形成されている。第1の電極には、第1の電極部に電圧を印加する電源部が接続され、第2の電極部には、第2の電極部に誘起され、第1の基板の走行に伴い変化される誘起電圧を検出する検出部が接続されている。
(もっと読む)
回転速度検出装置
【課題】回転速度検出装置において、瞬時回転速度の時間分解能を上げるとともに、高精度に瞬時回転速度を求めることができるようにする。
【解決手段】回転体の回転に応じて信号波を発生するセンサと、信号波を解析して回転体の瞬時回転数を算出する演算手段とを備えた回転速度検出装置において、信号波の3〜7の波数を含む短時間の時間窓によって信号波を切り出し(S3)、切り出した信号波を解析して瞬時位相を算出し、瞬時位相の時間変化から瞬時角速度を算出し(S4〜S7)、瞬時角速度を積分して改めて瞬時位相を算出し(S8)、さらに、信号波の山のピーク時刻を算出し(S2)、ピーク時刻に基づいて前記改めて算出した瞬時位相を補正して補正瞬時位相を算出し(S9)、補正瞬時位相の時間変化から瞬時回転数を算出する(S11)。
(もっと読む)
物理量検出装置
【課題】故障の有無を判定するだけでなく、故障箇所をある程度特定することができる物理量検出装置を提供すること。
【解決手段】角速度検出装置1(物理量検出装置の一例)は、振動子100、駆動回路20、検出回路30、電圧判定回路50a、50b、故障判定回路60を含む。駆動回路20は、駆動信号を生成して振動子100に供給する。検出回路30は、振動子100の出力信号に基づいて、角速度(物理量の一例)に応じた検出信号を生成する。電圧判定回路50a、50bは、それぞれ、駆動回路20の入力信号又は出力信号の電圧レベル及び同期検波回路35の入力信号の電圧レベルが正常か否かを判定する。故障判定回路60は、電圧レベルが正常でないと判定した電圧判定回路50a又は50bに応じて異なる電圧レベルの信号を生成し、外部出力端子17を介して外部へ出力する。
(もっと読む)
回転速度計測装置
【課題】モータの回転角度検出センサで一定時間内に検出される回転子の角度移動量が360°を超える超高速回転であっても回転速度を計測すること。
【解決手段】正回転又はこの逆に負回転する回転体の0°〜360°の回転位置を電気角で検出し、この電気角に対応する整数値である角度検出値を出力するレゾルバ12と、このレゾルバ12から出力される角度検出値の一定時間内の移動量である角度移動量及び回転体の回転方向を求め、当該角度移動量をもとに回転体の回転速度を求める回転数演算回路13とを有する。回転数演算回路13が、前回の角度移動量と今回の角度移動量との差分が180°の角度を超えた際に回転体が正回転側に360°の角度を超えたと判断し、この判断時に、今回の角度移動量に360°の角度を加算し、この加算結果を回転速度を求めるために用いる角度移動量とするにようにした。
(もっと読む)
速度監視装置
【課題】断線やノイズによる異常を含むエンコーダの出力パルス異常を、容易かつ安価に検出可能とした速度監視装置を提供する。
【解決手段】電力変換器20によって駆動される電動機30の回転により、互いに位相の異なる第1,第2のパルスを出力するエンコーダ41と、制御周期内に発生した前記各パルスをそれぞれカウントするUPカウンタ42A,42Bと、これらのカウント値から第1,第2の速度演算値をそれぞれ求める速度演算手段45A,45Bと、各速度演算値の差を可変の異常判別基準値と比較してエンコーダ41の出力パルスの異常を判別する比較手段48と、異常判別基準値を生成する基準値演算手段49とを備え、この基準値演算手段49は、前記制御周期とエンコーダ41の分解能と可変の設定パラメータとに基づいて異常判別基準値を生成する。
(もっと読む)
車両走行速度測定装置及び車両走行速度測定方法
【課題】遠心力の影響度合いを緩和させて速度算出性能を向上させることができる車両走行速度測定装置を提供する。
【解決手段】センサユニット100において、センサ部202は、車両のタイヤ回転に伴って発生する加速度をXB軸とYB軸とで分散検出し、XB軸の加速度α1と、YB軸の加速度α2とを出力する。通信部203は、加速度α1及び加速度α2をPND100に送信する。PND100において、通信部103は、センサユニット100から加速度α1及び加速度α2を受信する。制御部101は、加速度α1と加速度α2とを合成して加速度α3を算出し、加速度α3から車両の走行速度を算出する。
(もっと読む)
警告装置
【課題】警告表示に対する運転者の関心が薄れることがない警告装置を提供する。
【解決手段】本発明は、車両に搭載され車両速度が制限速度を超えていることを運転者に対し警告する警告装置であって、前記車両の車両速度を検出する車速センサ210と、前記車両が走行する道路の制限速度に係る情報を取得するナビゲーションシステム部800と、前記車両の車両速度が制限速度を超えてからも運転者に対し警告を猶予する警告猶予時間を設定する警告猶予時間設定部と、車速センサ210で検出された車両速度が、ナビゲーションシステム部800で取得された制限速度を超えたとき、車両速度が継続して制限速度を超えている時間を計時する計時部と、前記計時部で計時する計時時間が、前記告猶予時間設定部でされた猶予時間を超えたとき、運転者に警告を行うインターフェイス部600と、を有することを特徴とする。
(もっと読む)
21 - 30 / 106
[ Back to top ]