
国際特許分類[G01S13/50]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469)
国際特許分類[G01S13/50]の下位に属する分類
国際特許分類[G01S13/50]に分類される特許
111 - 120 / 158
車両の走行制御装置
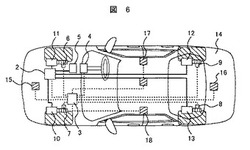
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
IDドップラー移動検出器
無線周波識別(RFID)検出システムに用いられるRFIDリーダーのためのシステム及び方法。リーダーは、RF信号を生成するRF源を有する。アンテナがRF源に接続されている。このアンテナは、呼掛領域内の一つ以上のRFIDマーカーに呼掛RF信号を送信し、且つ呼掛領域内の一つ以上のアイテムから交信信号を受信する。その交信信号は、呼掛領域内のアイテムの移動を示すドップラー信号を含む。受信機は交信信号を受信し、運動検出回路系はドップラー信号を検出する。 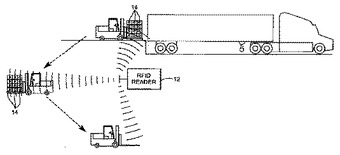 (もっと読む)
(もっと読む)
高速フーリエ変換と加算平均による速度の測定方法

【課題】 ランダム雑音を減らすことができ、移動体の速度を高い精度で確実に決定できる高速フーリエ変換と加算平均による速度の測定方法を提供すること
【解決手段】 移動体からの散乱波は所定時間毎のサンプリングにより数値列d1へ変換し、数値列d1には所定サンプル数について高速フーリエ変換を行って周波数スペクトルを求め(s1)、次に周波数スペクトルから最大ピークおよび候補となる複数の周波数を選出し(s2)、選出した周波数についてそれぞれの該当周期により数値列d1を分割して(s3)、当該分割単位で加算した後に平均値を求める同期加算平均の処理を行い(s4)、当該同期加算平均による第2数値列d2にはそれぞれ所定サンプル数について高速フーリエ変換を行って第2周波数スペクトルを求め(s5)、それら第2周波数スペクトルから最大ピークを選出し、この最大ピークの周波数が速度の真値であると決定する。
(もっと読む)
目標検出装置
【課題】短時間しか出現しない目標が小目標であっても、その小目標を確実に検出し、目標検出性能を向上できる目標検出装置。
【解決手段】受信信号を短時間フーリエ変換により時間−周波数軸上の信号に変換するSTFT部2と、短時間フーリエ変換により得られた時間−周波数軸上の信号の中から、最大値からQ番目までのセルを検出し、Q個のセルの各々について、該セルを含むN×N(Nは正の整数)のセル範囲を指定するセル範囲指定部3と、指定されたセル範囲に対して2次元離散ウェーブレット変換を実行する2次元DWT部5と、2次元離散ウェーブレット変換によって得られたウェーブレット展開係数の中から判定に使用するセルの範囲を指定する判定セル範囲指定部6と、指定された範囲のセルを所定のスレショルドレベルと比較するスレショルド部7と、比較結果に基づき目標を検出する検出部8を備える。
(もっと読む)
被検者の生命パラメーターを取得するためのセンサーを位置決めするシステム及び方法
ドップラーレーダーセンサーを使って、参照信号又は目標信号を生成する。参照信号又は目的信号を使って、被検者の生命パラメーターを取得するための測定センサーの位置を決める。本発明により、センサーの位置を決めるための、単純で信頼できる技法を提供する。本発明により、更に、センサーの位置を再現するための、単純で信頼できる技法を提供する。  (もっと読む)
(もっと読む)
レーダ信号処理方法及びレーダ信号処理装置
【課題】
パルス積分時間内に着目しているレンジビンから1/2パルス幅単位以上移動するような高速で等速直線運動をする目標に対しても、効果的に積分利得を得られるレーダ信号処理方法及びレーダ信号処理装置を提供する。
【解決手段】
パルス積分時間内に着目しているレンジビンから1/2パルス幅単位以上移動するような高速で等速直線運動する目標であっても、1/2パルス幅単位内に留まっている時間内や、各ヒット間で移動するレンジビン数が一定である時間内はコヒーレント積分が可能である。想定した目標の速度に応じて、積分数算定器102により、パルス積分時間内で、コヒーレント積分可能なヒット数の組み合わせを算出し、各コヒーレント積分結果を一単位として、それらを振幅加算によるノンコヒーレント積分することにより、効果的に積分利得を得ることができる。
(もっと読む)
電波高度速度測定装置及び電波を用いた高度速度測定方法
【課題】重量リソースの厳しい月惑星ミッションのための宇宙機にも適合し、かつ、高度及び速度の測定精度の高い電波高度速度測定装置及び電波を用いた高度速度測定方法を提供する。
【解決手段】I/F信号から抽出されたI信号及びQ信号はディジタル化される。この処理は、周期Tで受信されるそれぞれのパルス毎に行われる。各パルスについてn点のレンジビンのデータがメモリ部24に保存される。必要な数のパルスが受信されると、ドップラ周波数推定処理部26において各パルスのn点のレンジビンそれぞれについてドップラ周波数が推定される。n点のドップラ周波数は、視線方向角の違いによってレンジビンに依存して異なる値をとる。この各点についてのレンジ時間t、ドップラ周波数fdからなるn個の組が、フィッティング処理部28に入力される。
(もっと読む)
レーダ装置
【課題】距離やドップラー速度に折返しが発生しても、気象クラッタを十分に抑圧して、正確に目標を検出することができるようにする。
【解決手段】ドップラー速度算出部11により算出されたドップラー速度の中で不連続に変化する点があれば、不連続に変化する点でドップラー速度の折返し補正を実施する速度折返し補正処理部12と、ドップラー速度を空間方向に平滑化するドップラー速度空間平滑処理部14とを設け、フィルタ設定部15が平滑化されたドップラー速度の信号成分を抑圧する帯域制限フィルタを設定し、クラッタ抑圧フィルタ処理部16が当該帯域制限フィルタを用いて、受信信号に含まれている不要信号成分を抑圧する。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合でも簡単な処理で精度良くドップラ速度を算出できるようにする。
【解決手段】電力強度分布を示す速度スペクトルのドップラ速度値それぞれの電力強度を極座標系の電力ベクトルに変換する(ステップS3a)。次に、上記変換された極座標系の電力ベクトルを合成し、電力合成ベクトルを求める(ステップS3b)。そして、上記求められた電力合成ベクトルと予め設定された閾値とを比較する(ステップS3c)。電力合成ベクトルが閾値より小さいと判定された場合は、この速度スペクトルを無効とする(ステップS3d)。また、電力合成ベクトルが閾値以上と判定された場合は、この速度スペクトルをもとにドップラ速度を算出する(ステップS3e)。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
111 - 120 / 158
[ Back to top ]