
国際特許分類[G01S13/50]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469)
国際特許分類[G01S13/50]の下位に属する分類
国際特許分類[G01S13/50]に分類される特許
141 - 150 / 158
両側波帯信号を使用する遠隔検知システムおよび方法
送受信機(102)を含む検知システム(100)が提供される。該送受信機は、第1および第2の周波数成分を有する両側波帯電磁波を送信する送信機チェーンと、標的によって反射された後の両側波帯電磁波を受信する受信機チェーンとを含む。システム(100)は、両側波帯電磁波から情報内容を抽出する基本帯域回路(104)をさらに含む。第1および第2の周波数成分間の分離は、両側波帯電磁波の一方の側波帯によって生成される信号応答内のスパイクを、両側波帯電磁波の他方の側波帯によって生成される信号応答のヌルポイントにほぼ重複させる。 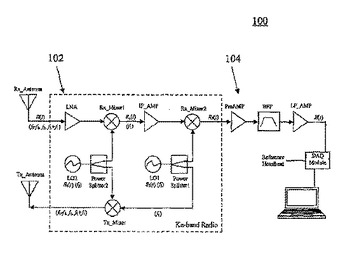 (もっと読む)
(もっと読む)
高周波回路およびマイクロ波あるいはミリ波ドップラーセンサ

【課題】 従来の高周波回路は発振器とミキサの間に分配器・結合器があり、送信手段・受信手段からの送信波・受信波を分配・結合しているため、分配器・結合器の伝送線路による損失が発生し、高周波回路が大型、高価格になる問題があった。
【解決手段】 発振器とミキサを直結し、送信波は発振器で生成されミキサを通過したマイクロ波やミリ波の透過電力を利用することにより、分配器・結合器をなくし分配器・結合器の伝送線路による損失を低減し、小型化、低価格の高周波回路を提供する。
(もっと読む)
スポーツボールの回転パラメータの決定
ゴルフボールの回転軸や回転速度のような、スポーツボールの回転パラメータを決定する方法である。回転軸は飛んでいるボールの軌跡からのみで決定され、回転速度はレーダーによって得られた信号の振動数解析から決定され、このような信号は振動数が等間隔に位置するスペクトルトレースを含んでおり、このような振動数の距離は回転速度に関連している。  (もっと読む)
(もっと読む)
移動予測表示装置およびレーダシステム

【課題】様々な形状の物標についても、観測者が物標の移動予測結果を把握することが容易である移動予測表示装置およびレーダシステムを提供する。
【解決手段】画像データ生成部16は、測位レーダ部12で取得された測位データに基づいて画像データを生成し、測位画像データ記憶部18に入力する。切り出し部20は、観測しようとする面、すなわち切り出し面のデータを測位画像データ記憶部18から取り出し、画像合成部24および表示判定部26に入力する。表示判定部26は、物標の像が移動する様子によって物標の移動予測の結果を表示することが可能であるか否かの判定を行う。一方、ドップラレーダ部14は、切り出し面内での物標の移動速度を算出し、画像合成部24に入力する。画像合成部24は、表示判定部の判定結果に従って物標の移動予測の結果を表示する画像データを生成し、画像表示部30に入力する。
(もっと読む)
自動吐水制御装置
【課題】 自動吐水制御装置を持つ洗面台で、検知対象物の進入角度、進入位置の如何に関らず、洗面台の上方空間に進入する検知対象物を確実に検知して吐水を行うようにする。
【解決手段】 マイクロ波センサ7はアンテナ51と、アンテナ51を励振して電波ビームを放射させると共に受信した反射電波の信号からドップラ信号を生成するドライバ回路53とを有する。ドライバ回路53はアンテナ51を操作して電波ビームの放射方向をシンクの上方空間領域からシンクの底部領域へ、又はこれとは逆に切替える機能を持つ。コントローラ部9はドライバ回路53からドップラ信号を入力し、手の進入や手洗いの継続などを判断し、この判断結果に応じて水栓機構に接続されるバルブ5の開/閉制御を行ったり、電波ビームの放射方向の切替え指示をドライバ回路53に与えたりする。
(もっと読む)
誘導弾システム
【課題】 ホバリング中のヘリコプタに対しても効果的に対処できる、電波センサを用いた誘導弾システムを得る。
【解決手段】 電波センサとして、要撃管制装置1側に送受信部(1)11及び信号処理部(1)12を、また誘導弾側に送受信部(2)21及び信号処理部(2)22をそれぞれ備え、これら電波センサにより回転翼を有する対象目標を検出し、その目標情報を取得する。また、要撃管制装置1側での要撃計算の結果として対象目標との予想会合点とともに、所定のホーミング時間が確保された上方円弧状の飛翔経路情報、及びゲインを算出し、これらを誘導弾2側に指示する。さらに、誘導弾2におけるホーミング誘導計算の実行時には、操舵量に対するゲインとして、要撃管制装置1側で取得したゲインと誘導弾2側で取得したゲインとを相補的に適用し、対象目標への誘導接近中における良好な誘導精度を維持する。
(もっと読む)
ドプラ算出装置およびレーダ装置
【課題】 目標物体に対する相対速度および接近/離反をIQ検波方式により求めるドプラ算出装置であって、これを小規模にかつ高速処理可能に実現する。
【解決手段】 ドプラ算出手段11により、目標物体からの受信信号をIQ検波して得たI−チャンネルおよびQ−チャンネル信号により定まるベクトル回転角の変化量に基づいてドプラを算出する。この場合、I−チャンネルおよびQ−チャンネル信号の各正負極性(+,−)を表す符号対の周期的な変化を検出する。そして、その変化の周期性に基づいて、相対速度(V)および接近/離反(A/R)を算出するように構成する。
(もっと読む)
マイクロウエーブセンサ
【課題】 受動型赤外線センサなどを追加することなく、金属板などによるマスキング行為を検出可能なマイクロウエーブセンサを提供する。
【解決手段】 送信アンテナ部A1の経路上に接続される第1の方向性結合器DC1と、受信アンテナ部A2の経路上に接続される第2の方向性結合器DC2と、これらの各モニタ出力に基づいて、送信アンテナ部A1における反射特性に対応する散乱パラメータS11と送信アンテナ部A1から受信アンテナ部A2への伝送特性に対応する散乱パラメータS21とを求めるとともに、これらの散乱パラメータS11および散乱パラメータS21の少なくとも一方がそれぞれに予め定められた所定範囲外の値となる状態が所定時間以上継続したときに警告信号Dout2を出力する判定部4とを備える。
(もっと読む)
移動体検知装置
【課題】 2周波CW方式レーダを用いた移動体検知装置において、2つのドップラ信号間の位相差をFFT等の複雑な演算処理で求めると処理負荷が大きい。
【解決手段】 ミキサ32から時分割で交互に出力されるドップラ信号D1,D2を切替器34で分離し、それぞれをLPF36,38で平滑化する。差分器44は、平滑化されたD1,D2の差信号を生成する。差信号の振幅BはD1,D2相互の位相差Δφ及び元のドップラ信号の振幅Aに応じて増減する。移動体までの距離Rは位相差Δφと比例関係にあり、Δφは信号強度比κ(≡B/A)に比例する式で近似される。そこで、除算器50でκを求め、これを距離Rを表す指標として用い、移動体検知を行う。
(もっと読む)
移動速度測定方法及び移動速度測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,或いは移動局間の相対的な移動速度を直接測定することを可能とする。
【解決手段】無線局1の送信手段103が周波数f1 の第1の波と周波数f2 の第2の波を無線局2に送信し,無線局2の周波数シフト手段202が,受信したそれぞれの波の周波数をシフトし,第1の波から周波数f3 の第3の波を,第2の波から周波数f4 の第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信し,無線局1の周波数シフト手段105が,第1の波〜第4の波の,相異なる2組の2つの波を用い,それぞれ周波数をシフトして,周波数差が第1の無線局と第2の無線局間の相対移動速度に起因するドップラー効果で決められる第5の波と第6の波を生成し,測定手段106が,第5の波と第6の波の周波数差に基づいて,無線局1と無線局2間の相対移動速度を測定する。
(もっと読む)
141 - 150 / 158
[ Back to top ]