
国際特許分類[G01S13/50]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469)
国際特許分類[G01S13/50]の下位に属する分類
国際特許分類[G01S13/50]に分類される特許
131 - 140 / 158
マイクロ波ドップラーセンサ
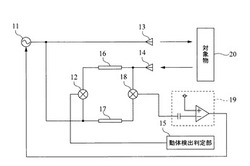
【課題】 ドップラーセンサ自身の持つノイズや蛍光灯などの影響によるノイズの影響を受けることなく高精度に動体を検出することができるマイクロ波ドップラーセンサを提供すること。
【解決手段】 局部発振器11からの出力信号を送信アンテナ13から出射し、対象物20からの反射波を受信アンテナ14で受信する。出力信号は、第1ミキサ12に直接注入し、第2位相器17を介して第2ミキサ18に注入する。反射波は、第1位相器16を介して第1ミキサに入力し、第2ミキサへは直接入力する。各位相器は位相を90度遅らせる。動体からの反射波は、ドップラー効果により周波数変調されるので、各ミキサから混合信号として出力されるドップラー信号は位相差が180度生じる。第2ミキサによる混合信号を負帰還増幅器19を用いて局部発振器11で生成される信号を振幅変調する。ノイズ等の不要な振幅性雑音成分は位相差が生じないため抑圧される。
(もっと読む)
マイクロ波ドップラーセンサ

【課題】 加工性の良好な材料を用いて、強度、コストの問題に対応しつつ、ドップラーセンサの回路に影響を与えないマイクロ波ドップラーセンサを提供すること
【解決手段】 所定周波数のマイクロ波を生成する局部発振器15と、マイクロ波を放射並びに受信するアンテナ12と、そのアンテナから受信したマイクロ波と局部発振器から出力されるマイクロ波を混合し検波する検波器16と、アンテナの前面に配置されるレドーム13と、を備える。レドームは、全表面の面積の2分の1の範囲である第1レドーム部13aと他方の2分の1の範囲である第2レドーム部13bとに、所定周波数により求められる波長の4分の1の深さの段差を設けた。
(もっと読む)
移動体検知装置及び移動体検知方法
【課題】外乱の影響を受けずに移動体を正しく検知する。
【解決手段】基準電圧生成部14は、検波器13が検波した検波信号S3の信号レベルを基準電圧値Vref0に加算し、コンパレータ15は、信号S2と基準電圧値Vrefとを比較して、パルス信号P1を出力する。カウンタ16は、パルス信号P1のパルス数をカウントしてトリガ信号P3をリトリガーブル・タイマ18に出力し、リトリガーブル・タイマ18は移動体検知信号P4を出力する。自走タイマ17は、パルス信号P1の出力が停止している場合、カウンタ16に、トリガ信号P3の出力間隔よりも長い間隔でリセット信号P2を出力する。雪等の外乱により、パルス信号P1の出力が間歇的となった場合、パルス信号P1がリセットされるため、リトリガーブル・タイマ18はHレベルの移動体検知信号P4を出力しなくなる。
(もっと読む)
レーダー装置
【課題】 受信信号がミクサーに入る経路上に送信信号が漏れ込むことを防止することにより測定精度の向上の図られたレーダー装置を提供する。
【解決手段】 送信信号の一部を方向性結合器(DC)110において取り出し、可変減衰器(VATT)130及び可変位相器(VPH)150を用いて処理することにより、相殺信号を生成する。この相殺信号を低雑音増幅器(LNA)70の出力に結合器(COMB)160を用いて結合することにより、受信信号に含まれていた送信信号に基づく不要成分を相殺する。
(もっと読む)
動いている物体を特定するためのコンピュータにより実現される方法
所定の周波数における信号を最初に送信することによって、動いている物体を特定する方法。未知の物体が信号を反射し、反射された信号が検出される。反射された信号の周波数が、未知の物体の動きに従って変調される。反射された信号から一般的特徴が抽出され、統計的分類器が、それらの特徴を用いて未知の物体を特定する。 (もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
目標検出装置
【課題】目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力された信号を短時間フーリエ変換によって時間−周波数軸上の信号に変換して出力する短時間フーリエ変換部1と、短時間フーリエ変換部から得られた時間−周波数軸上の信号に対して2次元離散ウェーブレット変換を施す2次元離散ウェーブレット変換部2と、2次元離散ウェーブレット変換部から得られるウェーブレット展開係数に基づき目標を検出する検出部6とを備えた。
(もっと読む)
軸ずれ角推定装置および軸ずれ角推定方法
【課題】自速度の検出を不要とし、従来装置よりも演算量を削減してテーラー展開を用いずに軸ずれ角を推定することができる軸ずれ角推定装置および軸ずれ角推定方法を得る
【解決手段】複数のレーダ反射体のそれぞれについて相対速度と方位角度とを含む観測データを検知する検知手段110と、複数のレーダ反射体のそれぞれについて検知した観測データに基づいてベクトル演算による最小二乗法によりレーダのオフセット角推定値を算出する演算手段120とを備える。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合でも、高い精度で観測対象の速度を算出する。
【解決手段】パルス繰り返し周波数(PRF)を切り替え可能なレーダ装置にあって、レーダエコーから観測される速度スペクトルをそれぞれ位相差ベクトルに変換する。そして、PRFごとの位相角が観測対象のドップラ速度に比例するということに基づいて、それぞれのPRFの位相差ベクトルにより得られる位相角を基準値であるPRFに基づく値に補正するようにする。これによりPRFによらず速度算出に係る受信データを統一的に扱えるようにし、より多くの受信データを用いてターゲットのドップラ速度を算出するようにする。
(もっと読む)
マイクロウエーブセンサ
【課題】 簡単な構成によって、風によって揺れている草木などと侵入者などの検知対象物体とをより的確に識別可能とすることで、誤報を極力防止するとともに動作の信頼性を高めたマイクロウエーブセンサを提供する。
【解決手段】 検知された検知対象物体までの距離の単位時間当たりの変化量を移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備える。
(もっと読む)
131 - 140 / 158
[ Back to top ]