
国際特許分類[G01S5/12]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 相異なる形の位置線,例.双曲線,円線,楕円線または放射状線,の座標づけによるもの (88)
国際特許分類[G01S5/12]に分類される特許
11 - 20 / 88
位置教示システム
【課題】携帯端末の大型化を抑制しつつ、マルチパスに対応可能である位置教示システムを提供する。
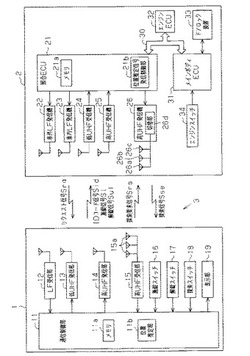
【解決手段】カーファインダシステム3は、車両2に設けられた複数の発信アンテナから電子キー1側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、電子キー1に設けられたアレーアンテナ15aが受信することで、車両2の各発信アンテナから発信された信号を平均化処理して、到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部11bを備える。そして、カーファインダシステム3は、位置推定部11bが演算した位置情報を表示部19によって使用者に教示する。
(もっと読む)
位置検出システム

【課題】無線タグリーダによって無線タグの位置を追跡し得る位置検出システムにおいて、無線タグの電力消費を効果的に抑制する。
【解決手段】位置検出システム1において、無線タグリーダ10は、可変指向性アンテナ14を備えると共に、無線タグ50に対して電波の走査速度に関するデータを含む送信データを送信可能とされており、更に、無線タグからの電波を取得したときの可変指向性アンテナに対する電波の最大入射方向に基づいて無線タグ50の方位を追跡可能とされている。無線タグ50は、送信データに含まれる「走査速度に関するデータ」に基づいて、当該無線タグ50における周期的な電波送出時間帯を決定しており、その決定された電波送出時間帯に従い、アンテナ54を介して電波を周期的に送信している。
(もっと読む)
複数人配置確認支援システム
【課題】複数人の配置を正確に把握する。
【解決手段】フォーメーション確認支援システム1は、携帯端末2、基地局3及び管理サーバ4を備える。携帯端末2は、測定対象領域にいる各人に装着され、当該携帯端末2に固有の端末IDを含む電波を発信する発信部を有する端末である。基地局3は、測定対象領域の周囲に設置され、1以上の基地局3が携帯端末2と通信可能な範囲が測定対象領域全体をカバーするように基地局3の台数及び設置位置が調整される。そして、携帯端末2から電波を受信し、その受信した電波に基づいて当該携帯端末2の方向及び距離を求め、求めた携帯端末2の方向及び距離と、基地局3自体の位置とから携帯端末2の位置を算出し、算出した携帯端末2の位置、端末ID及びその時の時刻を含む位置情報をサーバ4に送信する。管理サーバ4は、基地局3から各携帯端末2の位置情報を随時受信し、記憶するとともに、各携帯端末2の配置を表示する。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
位置特定装置
【課題】長方形のサービスエリア内の長い辺に沿って移動する携帯端末の位置を、中継局を設けて、高精度で特定できる位置特定装置を安価に実現する。
【解決手段】基準局101から起点信号と方向測定信号を発信し、中継局102において、受信し再生した起点信号と同期した位置特定信号と別に生成した方向測定信号とを発信し、携帯端末103において、基準局101から発信された方向測定信号の位相を測定し、かつ基準局101から直接受信し再生した起点信号を基準として、中継局102から受信して再生した距離測定信号の位相と方向測定信号の位相とを測定し、前記位相の測定結果から、三角法によって、自局の位置を特定する。
(もっと読む)
マルチビームを用いて無線局の位置を推定する方法及び装置
【課題】無線局のサイズや重量を増やすことなく無線局の位置を適切に判定できるようにすること。
【解決手段】無線通信システムにおける無線局の位置を推定する方法及び装置が提供される。マルチビームアンテナパターンの複数のビーム角度と、無線局が受信した信号の特性とに基づいて、マルチビームアンテナパターンの基準位置からの方位角を推定することが行われる。無線局が受信した信号の特性は、複数のビーム角度の各々により、マルチビームアンテナパターンのビーム各々から送信された複数の無線信号各々についての特性である。
(もっと読む)
1つ以上の基地局に関して無線移動装置の位置を推定すること
【課題】複数の基地局を持っている通信網において移動装置の位置を推定する。
【解決手段】第1の方法は、移動装置が基地局のうちの1つのみと通信することができるエリアを決定することを含んでいる。そのエリア内の平均位置が計算され、推定として使用される。第2の方法は移動装置が2つの基地局のオーバーラップしているカバレージエリア40内にあるエリアを決定することを含んでいる。各基地局から移動装置によって受信された信号の到着の相対時間差が一定の距離点の軌跡が決定される。移動装置で、1つの基地局の第1および第2のセクター間の相対的な信号電力に基づいた角度θを有する線が、軌跡と交差する点が決定され、移動装置の位置が推定される。
(もっと読む)
方向探知によって移動体無線ネットワーク内での位置を決定するための方法および移動体無線端末デバイス
本発明は、セルラ移動体無線ネットワーク内での移動体無線端末デバイス(13、22)の位置を決定するための方法であって、移動体無線ネットワークが、それぞれ1つの基地局(12、14、21)を備える複数のセルを有し、端末デバイス(13、22)が1つまたは複数の基地局(12、14、21)にログインされる方法であって、位置決定が、端末デバイス(13、22)によって、絶対位置が既知である少なくとも1つの基地局(12、14、21)を位置特定するための方向探知アクションによって行われ、方向探知が、端末デバイス(13、22)に組み込まれた指向性アンテナによって、基地局(12、14、21)の位置に指向性アンテナのメインローブを向けることによって行われる方法に関する。  (もっと読む)
(もっと読む)
移動体端末の位置の実時間差の決定の方法及び装置
コアネットワークと通信を行う複数のeノードBを含み、前記複数のeノードB各々は複数の関連セルを有しており、前記複数の関連セル各々は1つ以上の移動体端末に対してサービスを行う潜在的能力がある通信システムの移動体端末についての実時間差の決定を行う方法において、前記移動体端末と第1のサービングeノードBとの間の第1の地理的な距離尺度の代表値である第1のタイミングアドバンス値を、第2のサービングeノードBへのハンドオーバに先立って決定し(S10)、前記移動体端末と前記第2のサービングeノードBとの間の第2の地理的な距離尺度の代表値である第2のタイミングアドバンス値を、前記ハンドオーバの後に決定する(S20)。これに続き、前記移動体端末と少なくとも2つのeノードBとの間の少なくとも到来時刻の尺度を決定し(S30)、前記移動体端末についての前記決定された第1と第2の地理的な距離尺度と前記決定された到来時刻の尺度との代表値を少なくとも前記第2のサービングeノードBに対して、前記少なくとも2つのeノードBのユニークな識別パラメータ各々とともにシグナリングする(S40)。ここで、前記実時間差の決定が、少なくとも前記シグナリングされた代表値に基づいて可能になる。 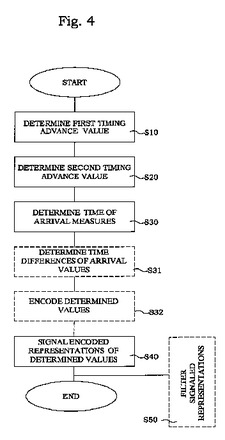 (もっと読む)
(もっと読む)
送受信機の位置を特定する方法及びシステム
【課題】複数のノードから成る協調中継ネットワークにおいて、送受信機の位置を特定する。
【解決手段】一次ノード201がレンジング要求(RREQ)メッセージを報知する。ターゲットノード220が、RREQメッセージを受信するのに応答して、レンジング応答(RREP)メッセージを報知し、RREPメッセージは、RREQメッセージを受信する時刻と、RREPメッセージを報知する時刻との間の時間差を含む。二次ノード202,203が、RREQメッセージ及びRREPメッセージを受信するのに応答して、レンジングデータ(RDAT)メッセージを報知し、RDATメッセージは、RREQメッセージを受信する時刻と、RREPメッセージを受信する時刻との間の時間差を含む。そして位置ソルバー210が、RREPメッセージ及びRDATメッセージ内の時間差に基づいて、ターゲットノードのロケーションを確定する。
(もっと読む)
11 - 20 / 88
[ Back to top ]