
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
1,201 - 1,210 / 1,802
移動体測定システム
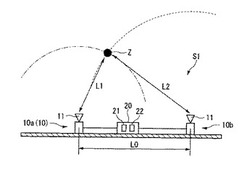
【課題】 簡易な構成により、被測定物までの距離及び位置を容易に測定することが可能な移動体測定システムを提供する。
【解決手段】 移動体測定システムS1は、被測定物Zまでの距離L1,L2を電波によって測定する複数の距離センサ10a,10bと、複数の距離センサ10a,10bのそれぞれからの測定情報及び複数の距離センサ10a,10b同士の配置情報L0に基づいて、被測定物Zの位置を求める演算部21と、を備える。
(もっと読む)
情報処理システム、および位置情報提示方法

【課題】衛星測位システムを利用したシステムにおいて、位置測位が難しい環境でも、正確な現在位置を提示する。
【解決手段】移動端末装置20に、被写体30を撮影する手段と、GPS衛星からの位置情報を受信する手段と、撮影された被写体の画像情報に受信した位置情報を対応付けた端末情報をサービス業者システム70に送信する手段と、を設ける。また、サービス業者システム70に、施設毎に、該施設の位置情報と施設の画像情報とを対応付けたデータベースを記憶させ、移動端末装置20からの端末情報を受信する手段と、受信した端末情報に対応する施設の位置情報をデータベースから検索して、検索した位置情報を移動端末装置20に送信する手段と、を設ける。そして、移動端末装置20は、送信した端末情報に応答してサービス業者システム70が送信する位置情報を受信して利用者に提示する。
(もっと読む)
ブイ式波高計
【課題】GPSブイによる波高・波向計測において、水粒子運動とブイの運動が一致しないため、正しく計測されない問題および、ブイの水平位置とブイの垂直位置の共分散で波向が計測できない問題および、周期帯別波高、波向も計測されてない問題があった。
【解決手段】第1の問題は、水粒子位置とブイの位置のずれが存在する周波数領域の運動成分を除去するディジタルフィルターを通過させる方法と、ブイ位置と水粒子位置との位置ずれをディジタルフィルターで補正する方法で解決した。第2の問題は、水平位置を微分し、水平速度を求め、水平速度と垂直位置の共分散で求める方法で解決した。第3の問題は、ブイの位置データまたは、推測水粒子位置データを、あらかじめバンドパス等のディジタルフィルターを通し、周期帯別に分別しておき、上述の処理をすることで解決した。
(もっと読む)
移動体運動計測装置
【課題】
移動体の運動状態の計測のためのセンサやその算出手段に工夫を凝らして、移動体の運動状態を十分な精度で算出することを図る。
【解決手段】
移動体上の複数箇所に速度ベクトルデータ計測手段を設けて、指定された時間間隔で計測された速度ベクトルデータを使って、前記複数箇所の相互間の距離を拘束条件として前記移動体の運動状態を算出し、その算出された運動状態を前記速度ベクトルデータの計測時刻から指定された遅延時間後に出力する
(もっと読む)
無線移動通信ネットワークにおいて複数の移動局を用いて基地局の所在位置を決定する方法及び装置
【課題】BSAパラメータをリアルタイムで更新できる実用的なシステムを提供すること。
【解決手段】
基地局と通信中の移動局を含む無線通信ネットワークにおいて基地局の位置を決定する方法及び装置。BTS校正サーバーが、前記基地局とネットワーク接続される。BTS校正プログラムが、位置特定能力を有する移動局群内にプログラミングされる。前記BTS校正プログラムを用いて、校正情報を前記BTS校正サーバーによって要求することができ、又は前記移動局によってセッションを開始させることができる。前記BTS校正プログラムは、前記移動局のユーザーが基地局の所在位置を特定するために用いられるのを防止することを可能にするプライバシー機能も提供する。前記BTS校正プログラムは、権限が付与されている場合は、前記移動局の位置を決定し、位置測定値及び基地局位相測定値等の校正情報を前記サーバーに提供する。前記校正情報は、基地局アルマナックを校正するために使用することができる。  (もっと読む)
(もっと読む)
車両位置取得管理システム
【課題】安価な構成のシステムで車両の正確な位置を取得できるようにすると共に、端末に大きな負荷をかけることなく車両の位置を地図上に正確に表示できるようにする。
【解決手段】GPS衛星からの電波に基づく測位精度が低下する区間において、無線タグ6から車載装置の無線タグリーダで受信した位置情報と車載装置2のGPS測位機が測位した測位情報をサーバ8が受信したとき、サーバの主制御部がその位置情報と測位情報との差分を算出すると共にずれの方向を検出して前記記憶部に記憶し、次の無線タグ6の位置情報を前記無線タグリーダが受信するまで、前記GPS測位機が測位した測位情報に対して前記差分情報とずれの方向により前記車両の位置を補正して、その補正した位置を道路上の車両の位置情報として前記記憶手部に記憶させるようにした。
(もっと読む)
移動体位置検出装置、ナビゲーション装置及びプログラム
【課題】状況に応じて衛星航法受信機の受信感度を変更することで、その状況に適した衛星航法測位を行う。
【解決手段】駐車場出庫後等のような極力早いタイミングで位置・方位を修正する必要がある状況では、車載用ナビゲーション装置起動時にGPS受信機を高感度モードに設定することで速度重視の測位を行うことができる(S10,S20)。そして、位置・方位の修正が行われ(S30)、GPS速度ベクトルと自立航法速度ベクトルとがある程度近似した場合(S40:YES)は、高感度モードから低感度モードに切り替えることによって精度重視の測位を行うことができる(S50,S60)。このようにして、状況に適した受信感度でのGPS測位を行うことができるようになる。そして、状況に適したGPS測位に基づいて自立航法による測定結果を補正することで、より適切なマップマッチングを行うことができる。
(もっと読む)
位置判定システム及びその制御方法
【課題】 複数の監視対象の位置を同時に判定し、監視対象領域を自由に指定し、出入り口が存在しない場合でも適用可能で、高精度で位置を判定可能な位置判定システム等を提供する。
【解決手段】 監視対象に各々取り付けられ、あるいは、携帯されて、インパルス状の電波を出力する送信器5、6、7と、送信器5、6、7から出力された電波を受信する複数の受信器8、9と、複数の受信器8、9に各々信号伝送特性が等しいケーブル12、13を介して接続され、ケーブル12、13を介して伝送された複数の受信器8、9の出力信号に基づいて、送信器5、6、7が監視対象空間A内のいずれの位置に存在するかを判別する位置判定装置10とを備える位置判定システム。位置判定装置10は、監視対象空間Aを複数の空間A1、A2に分割し、各空間毎に送信器が当該空間内に存在するか、当該空間外に存在するかを判別できる。
(もっと読む)
端末装置、端末装置の制御プログラム
【課題】携帯電話機の基地局からの通信電波を利用することなく、基準信号の周波数誤差を示す情報を取得することができる端末装置等を提供すること。
【解決手段】
公称周波数情報、公称周波数誤差情報、及び、端末装置20の動作の基準となる基準信号の周波数誤差の最大値を示す周波数誤差最大値情報に基づいて、外部信号が規定周波数信号か否かを判断する規定周波数信号判断手段と、基準信号と外部から取得した規定周波数信号に基づいて、基準信号の現在の周波数誤差を示す現在周波数誤差情報を生成する現在周波数誤差情報生成手段と、複数の現在周波数誤差を平均することによって、現在周波数誤差の平均値を示す平均周波数誤差情報を生成する平均周波数誤差情報生成手段と、推定受信周波数情報と平均周波数誤差情報に基づいて、衛星信号S1等を探索するための周波数範囲を示す探索周波数範囲情報を生成する探索周波数範囲情報生成手段等を有する。
(もっと読む)
測位ゲートウェイ装置、端末位置情報要求処理方法およびプログラム
【課題】利用者の意図を反映しつつ測位回数を低減することが可能な測位ゲートウェイ装置を得る。
【解決手段】測位ゲートウェイ装置10は、測位装置4で得られた端末5の位置情報を保存テーブル13に保存し、利用者端末14、15から「現在時刻から5分前までの過去の位置情報を使用して良い」などの条件付きの端末位置情報要求を受け付ける。端末位置情報要求に条件が付加されていない場合は既定条件記憶テーブル16に記憶されている条件を付加する。要求処理部111Aは、保存テーブル13中に今回の端末位置情報要求と同じ端末5の位置情報であって条件を満たす端末位置情報が存在するか否かを判定する。存在すれば、測位装置4に対してあらためて測位要求を出すことなく、応答処理部112において前記保存されている端末位置情報を使って端末位置情報応答を生成し、利用者端末14、15に応答する。
(もっと読む)
1,201 - 1,210 / 1,802
[ Back to top ]