
国際特許分類[G06T1/00]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | 汎用イメージデータ処理 (27,485)
国際特許分類[G06T1/00]の下位に属する分類
プロセッサアーキテクチャ;プロセッサ構成,例.パイプライン (990)
メモリ管理 (517)
国際特許分類[G06T1/00]に分類される特許
161 - 170 / 25,978
棒状ワーク撮像装置および棒状ワークの先端同心判定装置
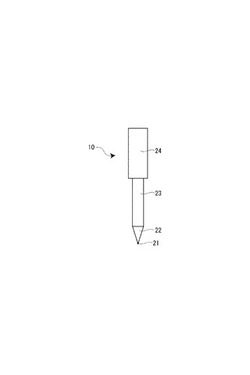
【課題】測定時間を短縮できると共に、高い精度で棒状ワークを管理できる棒状ワーク撮像装置および棒状ワークの先端同心判定装置を提供する。
【解決手段】鏡筒13にビームスプリッター42、43を設け、対物レンズ41からの像光を3つの光路P1〜P3に分光し、各光路P1〜P3の像光を拡大して、カメラ14、15、16で撮像する。ビームスプリッター42、43の光軸の中心位置をずらすことで、鏡筒13に連なるカメラ14で先端加工部21を撮像し、カメラ15で本体ストレート部23の一方の輪郭を撮像し、カメラ16で本体ストレート部23の他方の輪郭を撮像する。これらカメラ14、15、16の撮像信号を解析し、先端加工部21の軸心の位置と本体ストレート部23の軸心の位置とが合致するかどうかにより、棒状ワーク10の良否を判定する。
(もっと読む)
撮像装置、撮像方法、及び画像処理装置

【課題】撮像画像を取得する過程で深度方向の位置によらない全焦点画像の生成が可能な撮像装置、撮像方法、及び画像処理装置を提供すること。
【解決手段】フォーカスレンズ又は撮像素子駆動中に連続して露光することによりスイープ画像を撮像する撮像部と、撮像した前記スイープ画像をデコンボリューションし、デコンボリューション画像を生成する画像処理部と、を備えることを特徴とする、撮像装置が提供される。
(もっと読む)
空間イメージ次元縮小システム及び方法
【課題】複数の空間ピクセル(PX)を有するハイパースペクトルイメージ(HSI)データの次元縮小。
【解決手段】HSIデータの各PXに関連した係数のセット(A)、前記係数のセットを生成するために使用される基底ベクトル(BV)のセット(B)、及び最大エラー値(C)の受取、前記Bに関連する各PXのための第一セットのエラー(D)と、前記Bのサブセットと関連する各PXのための更なるセットのエラー(E)との計算、前記各D及びEに関する、前記最大エラー値を超えるエラーを有する空間ピクセルの数の%(F)の計算、前記各D及びEに関連する複数の縮小因子(G)の計算(前記Gは、前記Fと、前記HSIデータに関連するスペクトル次元数の両方に基づいて計算)、前記Fからの最大縮小因子と、及びこれらに関連した前記BVのセット又は前記BVのサブセットの最適サイズとの選択、を含む。
(もっと読む)
医用画像撮影システム、医用画像処理装置及びプログラム
【課題】静止画像の医用画像における撮影時の被写体の体動の有無を精度良く判定できるようにする。
【解決手段】医用画像撮影システムによれば、撮影用コンソールの制御部は、被写体を撮影することにより取得された静止画像である医用画像から被写体領域を抽出し、当該被写体領域からエッジによる高空間周波数成分を含まない局所領域を抽出する。そして、抽出された局所領域から高空間周波数成分を抽出し、当該抽出した高空間周波数成分に基づいて、撮影時の被写体の体動の有無を判定し、判定結果を出力手段により出力させる。
(もっと読む)
医用画像撮影システム、医用画像処理装置及びプログラム
【課題】診断用の医用画像として予め定められた基準を満たしていない不良画像を撮影技師が即座に認識することができるようにし、不良画像の見逃しの防止、患者負担の低減を図る。
【解決手段】医用画像撮影システム100によれば、FPD9は、人体の特定部位を被写体として撮影することにより静止画像である医用画像及びこの医用画像を縮小したプレビュー画像を生成し、撮影用コンソール5に送信する。撮影用コンソール5の制御部51は、プレビュー画像を解析することにより、撮影された医用画像が診断用の医用画像として予め定められた基準を満たすか否かを判定し、診断用の医用画像として予め定められた基準を満たしてないと判断された場合に、表示部54に警告を表示させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】運動の有効性に関するフィードバックを目に見える形でユーザに呈示することのできる仕組みを提供すること。
【解決手段】入力画像に映る人物の運動を認識する認識部と、前記認識部により認識される前記運動の有効性に応じて異なる仮想オブジェクトを前記入力画像に重畳する表示制御部と、を備える画像処理装置を提供する。前記画像処理装置は、前記認識部により認識される前記運動の有効性を示すスコアを算出するスコア算出部、をさらに備えてもよく、前記表示制御部は、前記スコア算出部により算出される前記スコアの大きさを表現する前記仮想オブジェクトを前記入力画像に重畳してもよい。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
端末装置、画像処理方法、及びプログラム
【課題】画像データに対する計測記録データを容易に作成することができる端末装置、画像処理方法、及びプログラムを提供する。
【解決手段】記憶部140は、画像データ内の第1座標範囲と、第1座標範囲に関する第1計測値データと、が関連付けられた第1画像データを保持する。制御部150は、第2画像データ内の第2座標範囲をユーザの指定に応じて取得する。解析部160は、第1座標範囲の画像パターンと第2座標範囲の画像パターンを比較し、比較結果及び第1計測値データに基づいて、第2座標範囲に関する第2計測値データを算出する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】対象物体までの距離を測定する際に、距離精度を向上させ、従来より遠い距離の対象物でも正確な距離を測定することができる画像処理装置及び画像処理方法を得ること。
【解決手段】一対の撮像素子で同時刻に同方向を撮像した一対の画像の一方の画像から対象物の画像を含む一方画像対象物領域302を抽出する。そして、一方画像対象物領域302を構成する複数の画像構成部分についてそれぞれ対象物画像構成部分304と背景画像構成部分303のいずれであるかの確度である背景度を算出する。そして、背景度を用いて他方の画像501内から一方画像対象物領域302と類似した画像を有する他方画像対象物領域503を抽出して、一方画像対象物領域302と他方画像対象物領域503との視差を算出する。
(もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、より高精度な計測を実現することのできる三次元計測装置を提供する。
【解決手段】基板検査装置1は、プリント基板2に対し縞状の光パターンを照射する照射装置4A,4Bと、これを撮像するカメラ5と、撮像された画像データを基に三次元計測を行う制御装置6とを備えている。制御装置6は、第1照射装置4Aから第1光パターンを照射して得られた画像データを基に第1計測値を取得し、第2照射装置4Bから第2光パターンを照射して得られた画像データを基に第2計測値を取得する。そして、両光パターンが照射される全照射領域に関しては、両計測値から特定される値を当該領域の高さデータとし、いずれか一方のみ照射される一部照射領域に関しては、前記全照射領域の高さデータから算出した補完データを基に当該領域に係る計測値の縞次数を特定し、当該領域に係る高さデータを取得する。
(もっと読む)
161 - 170 / 25,978
[ Back to top ]