
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,231 - 1,240 / 7,349
物体検知装置
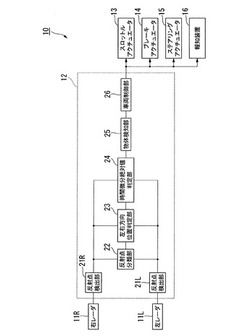
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの左右方向位置差分Δを算出し、この差分Δが所定の閾値Aよりも大きいか否かを判定する左右方向位置判定部23と、反射点rR,rLの左右方向位置差分Δの時間微分絶対値βが所定の閾値Bよりも大きいか否かを判定する時間微分絶対値判定部24と、反射点間距離の変化に基づいて前方領域を横切る物体が存在することを検知する物体検知部25とを備える。
(もっと読む)
駐車空間検出装置

【課題】駐車車両の形状によらずに、駐車空間をより正確に検出することを可能にする。
【解決手段】測距センサ2で逐次受信した各反射波の振幅強度を取得する振幅強度取得部13を備え、振幅強度取得部13で取得した振幅強度の時系列データをもとに、駐車車両に隣接する駐車空間を検出する。
(もっと読む)
道路環境情報取得装置及びその方法
【課題】撮像画像を基に道路環境を高い精度で検出する。
【解決手段】道路環境生成装置1は、自車両前方を撮像するカメラ2の撮像画像に、車幅方向及び車両進行方向に幅を有する方形の画素検出枠を設定する画素検出枠設定部13と、画素検出枠内の画素の情報を基に、該画素検出枠内の画像のエッジを算出する道路環境特徴算出部13と、エッジを表す複数の画素のうちの少なくとも3個の画素の位置を基に近似直線を算出する近似直線算出部14と、画素検出枠の車幅方向に延びる辺に近似直線が交差するか否かを判定する画素検出枠交差判定部15と、交差すると判定した近似直線と画素検出枠の車両進行方向に延びる辺との平行度を基に、エッジを画像内の道路環境を表すものとしての決定をする道路環境生成部16と、を備える。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの間の反射点間距離と、自車両の前後方向における各反射点rR,rLまでの距離を算出し、反射点間距離と各反射点rR,rLまでの距離とに基づいて物体の幅を検知する物体検知部26を備える。
(もっと読む)
車両用衝突警報装置
【課題】対象物の状態に応じて運転者に的確な警報を行うことが可能な衝突警報装置を提供する。
【解決手段】TTC算出部20が、車両の進行方向に存在する対象物を検出する監視センサ2から、その車両に対するその対象物の種別を含む対象物情報を取得し、この対象物情報に基づいて車両と対象物との衝突可能性の有無を判定し、衝突可能性が有ると判定した場合に両者の相対速度に対する相対距離の比である衝突余裕時間を算出する。次に、自車認識判定部30が、対象物の種別が通行者である場合に、画像センサ11からその通行者の画像情報である対象画像を取得し、この対象画像に基づいて対象物が車両の存在を認識している認識可能性を表す認識レベルを判定する。そして、パターン設定部40が、この認識レベルに応じて、認識可能性が大きいほど長い閾値時間を設定し、警報制御部50は、衝突余裕時間がこの閾値時間以下である場合に運転者警報を行うようにした。
(もっと読む)
車両用制御システム
【課題】快適性を損ねることなく飲酒運転を確実に防止する。
【解決手段】空調装置(500)を備える車両(10)に搭載される車両用制御システム(100)は、遠隔地からの遠隔始動要求に応じて前記車両の動力源を遠隔始動させる始動制御手段と、前記動力源の遠隔始動と同期して始動するように前記空調装置を制御する空調制御手段と、運転者の発進意図を検出可能な意図検出手段と、前記発進意図が検出された場合に前記遠隔始動された動力源を停止させる停止制御手段と、前記運転者の呼気中のアルコール濃度を検出可能なアルコール濃度検出手段と、前記検出されたアルコール濃度に応じて前記動力源の再始動を許可する許可手段とを備える。
(もっと読む)
衝突予測装置
【課題】簡易な方法で他車両の挙動を予測し、より精度の良いPCS制御を行うことのできる衝突予測装置を提供する。
【解決手段】自車両前方の他車両を検出する検出手段と、当該検出手段によって検出された上記他車両と上記自車両とが衝突する危険性が高いと判断した場合に衝突危険回避動作を行う衝突危険回避手段と、上記他車両に備わったナビゲーションシステムによって得られた当該他車両の位置情報および当該他車両の経路案内情報を車車間通信を介して受信する受信手段と、上記他車両の位置情報および上記他車両の経路案内情報に基づいて当該他車両の挙動を予測する予測手段と、当該予測手段によって予測された上記他車両の挙動が予め定められた第1条件を満たす場合に上記衝突危険回避手段が行う上記衝突危険回避動作のタイミングを上記第1条件を満たなかった場合より早くする動作変更手段とを備える。
(もっと読む)
車線境界検出装置、車線境界検出プログラム
【課題】撮像画像から得られる車線境界線以外の路面標示の情報を利用して、車線境界の検出精度を向上させる。
【解決手段】車線境界検出装置10は、車線境界線と補助線とからなる複合線が検出された場合に、複合線を構成する車線境界線および補助線の全てを境界線候補とし、これら境界線候補から求めた候補位置パラメータ(車線中央側のエッジの位置を近似した直線を規定するパラメータ)のうち最も信頼性の高いものを基準線に設定する。基準線の横位置D3を算出し、補助線が基準線に設定された場合は、補助線と車線境界線との間隔(線間隔)D2だけ、基準線の横位置D3を車線境界線側にシフトさせる補正をした位置D2+D3を境界パラメータとして設定する。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車載通信装置、周辺車両情報処理方法およびプログラム
【課題】車車間通信、路車間通信、自車両センサのうち少なくとも2つ以上を併用しつつ、従来よりも少ない処理量で、周辺車両に関する必要な情報を取得することを課題とする。
【解決手段】本発明は、車両(自車両100)に搭載され、周辺車両の情報を処理する車載通信装置(通信端末101)であって、複数の周辺車両を1つの車群にまとめるための車両同士の相対距離の閾値、および、他車両、路側機、自車両センサのうち少なくとも2つ以上から得た周辺車両の位置情報を記憶する記憶部と、記憶部を参照し、車両同士の相対距離の閾値に基づいて、複数の周辺車両を1つの車群とし、その車群の情報を車両内部の電子装置に送信する処理部と、を備える。
(もっと読む)
1,231 - 1,240 / 7,349
[ Back to top ]