
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,241 - 1,250 / 7,349
車線境界検出装置、車線境界検出プログラム
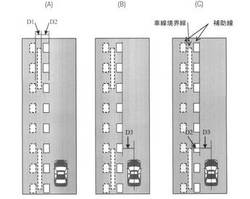
【課題】撮像画像から得られる車線境界線以外の路面標示の情報を利用して、車線境界の検出精度を向上させる。
【解決手段】車線境界検出装置10は、車線境界線と補助線とからなる複合線が検出された場合に、複合線を構成する車線境界線および補助線の全てを境界線候補とし、これら境界線候補から求めた候補位置パラメータ(車線中央側のエッジの位置を近似した直線を規定するパラメータ)のうち最も信頼性の高いものを基準線に設定する。基準線の横位置D3を算出し、補助線が基準線に設定された場合は、補助線と車線境界線との間隔(線間隔)D2だけ、基準線の横位置D3を車線境界線側にシフトさせる補正をした位置D2+D3を境界パラメータとして設定する。
(もっと読む)
車載通信装置、周辺車両情報処理方法およびプログラム

【課題】車車間通信、路車間通信、自車両センサのうち少なくとも2つ以上を併用しつつ、従来よりも少ない処理量で、周辺車両に関する必要な情報を取得することを課題とする。
【解決手段】本発明は、車両(自車両100)に搭載され、周辺車両の情報を処理する車載通信装置(通信端末101)であって、複数の周辺車両を1つの車群にまとめるための車両同士の相対距離の閾値、および、他車両、路側機、自車両センサのうち少なくとも2つ以上から得た周辺車両の位置情報を記憶する記憶部と、記憶部を参照し、車両同士の相対距離の閾値に基づいて、複数の周辺車両を1つの車群とし、その車群の情報を車両内部の電子装置に送信する処理部と、を備える。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
運転支援装置、及びその方法
【課題】特定の領域が存在する場合でも、必要に応じて逸脱する可能性を運転者に警告できる運転支援装置、及びその方法を提供する。
【解決手段】自車両の運転を支援する運転支援装置であって、予め定められた特定領域を検出する領域検出手段と、自車両が走行車線から逸脱して特定領域へ進入したか否かを判断する進入判断手段と、特定領域の周辺に存在する障害物を検出する障害物検出手段と、進入判断手段による特定領域へ進入したか否かの判断結果と、障害物検出手段による障害物の検出結果とに応じて自車両の運転を支援する運転支援手段とを備える。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
有料道路料金収受システム、路側無線装置、路側処理装置及び車載器
【課題】自動料金収受システム専用車線において、先行車両が自動料金収受が行えないことが判定できたときに、後方車両に対して無線を通じて警戒情報を送信することの可能な料金収受システム、路側無線装置、路側処理装置及び車載器を提供すること。
【解決手段】路側処理装置は、各ETC(登録商標)車線に設置した車線制御装置から車線番号と車線状況を受信し、先行車両の自動料金収受が正常に行われたか判断し、正常に自動料金収受が行われなかった場合、当該車両の後続車両に、当該車線内に緊急停止車両が存在することを示す警戒情報を作成して無線通信することが可能な料金収受システム。
(もっと読む)
運転支援装置
【課題】車両を運転するドライバの危険な状態を適切に検知して警告を行うことにより,効果が高いドライバへの運転支援が可能となる技術を提供する。
【解決手段】運転支援装置10において,ハザードマップ記憶部14には,過去のドライバの車両運転時に収集された情報に基づいて生成された,ドライバの生体情報が平常な状態から変化する場所が記録されたハザードマップ140が記憶されている。危険状態判定部15は,位置取得部12が取得した車両の位置がハザードマップ140に記録された場所であるときに,生体情報取得部13が取得したドライバのリアルタイムの生体情報に所定の変化がなければ,ドライバの状態が危険な状態であると判定する。警告部16は,ドライバの状態が危険な状態であると判定された場合に,ドライバに対して注意喚起の警告を行う。
(もっと読む)
走行支援装置
【課題】解決しようとする問題は、電波・超音波等の指向性や映像認識から障害物Cの位置を特定する方法では認知・判断が正常なら障害物Cや白線1の検知は不要で過剰警告となる。また認知・判断ミスでは非立体物の手前に白線1が無い限り、その先の法面や側溝等に対する警告はなく走行支援装置として機能しない問題がある。
【解決手段】本発明は、内因的要素である認知・判断ミスが車間距離の短縮や車線逸脱として現れる事から、自車Aの車速から停止距離内の先行車Bだけを検知し路面2を鏡面反射の影響を受けない状態で走査し、車側から約10cmにある白線1する事で追突・車線逸脱回避の警告を行う事を最も主要な特徴とする。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより視認性の良好な運転支援画像を表示する運転支援装置を提供する。
【解決手段】撮像手段1で撮像した車両の後方周囲画像から仮想視点画像と後方視点画像とを作成し、仮想視点画像の一部からなる近距離画像と後方視点画像の一部からなる遠距離画像とが上下に表示されるよう画面合成し運転支援画像として表示手段3に表示する。表示手段3における近距離画像と遠距離画像との画像境界を、表示手段3の中央部に対し両端部を上側に移動可能としたことにより、近距離画像の画面中央部より画面両端部の画面範囲を広くすることができる。従って、運転者が運転動作を行っている際に、車両周囲に存在する障害物をいち早く認識できるため、運転者にとって使用感の良い運転支援画像を提供することができる。
(もっと読む)
1,241 - 1,250 / 7,349
[ Back to top ]