
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,141 - 1,150 / 7,349
運転支援制御装置
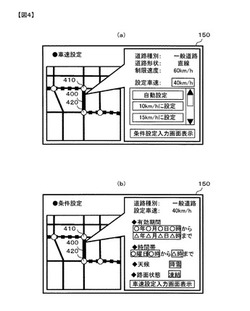
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
道路形状推定装置及びコンピュータプログラム及び道路形状推定方法

【課題】物体の誤検出や、静止判定の誤判定の影響を排除し、道路形状を推定する。
【解決手段】レーダ110(周辺物体観測装置)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。停止物識別部130(静止物体判定部)は、レーダ110が相対位置を観測した物体が静止しているか否かを判定する。道路近似曲線仮計算部140(物体相関部)は、レーダ110が観測した複数の相対位置のなかから、同一の物体についてレーダ110が観測した複数の相対位置を判定する。道路近似曲線本計算部160(近似曲線算出部)は、停止物識別部130の判定結果と、道路近似曲線仮計算部140の判定結果とに基づいて、移動体がいる道路の形状を近似する近似曲線を算出する。
(もっと読む)
車両支援装置
【課題】先行車等が接近した場合に、ステアリングの操作タイミングとの干渉を避けつつ、かつ、より早いタイミングで追突警報を行うことができる車両支援装置を提供することを課題とする。
【解決手段】本発明は、車両の運転者が先行車に対して所定距離になった際のブレーキおよびステアリングの操作タイミングの履歴を蓄積して平均値を算出し、運転者の実際の操作と平均値とを比較して運転者に対する警報を行う車両支援装置において、車両の自車速度および先行車との相対速度を検出し、検出された先行車との相対速度が予め定めた値以下である場合は、ブレーキの操作タイミングの平均値と比較して警報を行い、検出された先行車との相対速度が予め定めた値より大きい場合は、ステアリングの操作タイミングの平均値と比較して警報を行う。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】前方車両との車間距離を大きく空けることなく車両から前方の視認対象物を視認可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車高の高さを調整する為の車高調整機構4を備えた車両に搭載され、自車両61が交差点で停車した場合において、現在の自車両61の車高Hと、前方車両62の車高h1と、前方車両62までの車間距離L1と、視認対象物である信号機63の高さh2と、信号機までの距離L2をそれぞれ取得し、取得された各値から自車両61から視認対象物である信号機63を視認する為の車高である設定車高を算出し、算出された設定車高に設定する為の信号を車両制御ECU9に対して出力し、自車両61の車高が設定車高となるように制御させるように構成する。
(もっと読む)
運転者支援装置、および運転者支援システム
【課題】車両の運転者による運転操作を支援する運転者支援装置において、自車両の進行方向に他車両が存在する場合において交通流を最適化することができる技術を提供する。
【解決手段】車載装置においては目標速度設定処理にて、自車両の進行方向に存在する信号機についての現在および将来の灯色と各灯色の継続時間の情報とを含む信号機情報、自車両と信号機との間に存在する他車両の自車両に対する相対位置を推定するための情報を含む他車両情報、信号機の灯色が赤から青になったと仮定したときに信号機が配置された交差点に、他車両が進入を開始しようとするまでの時間を表す予想遅れ時間を取得し(S110,S120,S220)、信号機情報、相対位置、予想遅れ時間に基づいて、自車両が他車両に追いつくことなく走行することができる速度範囲を演算し(S230)、速度範囲を出力する(S250)。
(もっと読む)
障害物検知装置及びプログラム
【課題】障害物を精度良く検知することができる障害物検知装置及びプログラムを提供する。
【解決手段】本発明に係る障害物検知装置は、乗り物から測定対象物までの距離を複数の測定点それぞれについて取得する距離取得手段と、前記距離取得手段が取得した各距離のうち、前記乗り物の形状に対応した位置にある1以上の測定点における距離に基づいて、所定の距離内における障害物の有無を検知する検知手段と、を備える。そして、検知手段は、前記1以上の測定点における距離のうち、前記所定の距離よりも近い距離が所定の数以上あった場合に、前記所定の距離内に前記障害物が存在することを検知する。
(もっと読む)
車載用音声発生装置
【課題】運転者への警告に対する運転者のアクションに応じた報知音声を、歩行者に対して出力することが可能な車載用音声発生装置を提供する。
【解決手段】本発明の車載用音声発生装置は、音声発生器に対して音声の発生制御を行う音声制御部を備えている。また、車両の走行速度を示す車速情報を、測位航法装置等から取得する車速情報取得部を備えている。また、車速情報が示す車速が所定の閾値を下回る場合に、車両の進行方向へ歩行者等の移動体が進入可能であることを示す報知音声を、音声発生器より出力するよう音声制御部を制御する制御部を備えている。また、ブレーキ装置に対する操作を感知する、ブレーキ操作感知部を備えている。制御部は、車速情報が示す車速が所定の閾値を下回り、且つブレーキ装置に対する操作を所定時間を超えて継続的に感知した場合に、補助音声を出力するよう音声制御部を制御する。
(もっと読む)
道路構造測定方法および道路面測定装置
【課題】走行した道路の勾配などの道路構造幾何情報を低コストで簡便に取得し、道路画像処理に用いる高精度な座標変換テーブルを生成することが困難であった。
【解決手段】本発明の道路構造測定方法は、車両の世界座標系位置を取得し、道路を走行する車両の画像を撮像し、撮像された画像から前記車両の画像座標系位置を取得し、車両が実際に走行した走行距離を取得し、車両の画像座標系位置及び世界座標系位置と道路形状を表す道路構造幾何モデルとに基づき車両が走行した走行距離を計算し、車両が実際に走行した走行距離と、計算された走行距離のずれに基づいて道路構造幾何モデルのパラメータを推定することにより、道路構造特徴を計側する。
(もっと読む)
交差点安全走行システム
【課題】
交通標識や路面表示器に車両センサや人センサを備え、警告をドライバーが視認し易い標識,表示灯等に表示する。
【解決手段】
交差点安全走行システム100では、制御装置は、ある交通標識に備えられた車両センサ112により、交差点に進入しようとする車両V1,V2を検出したときは、当該車両が走行している道路と交差する道路に設置されている交通標識8A,8B,8C,8Dに備えられた表示灯1A,1B,1C,1Dに、車両に対する注意を喚起するための表示を行う。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自車両周囲の障害物に対する運転者の運転支援をより適切に実施可能な車両制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物側への自車両の移動抑制を支援する運転支援制御を行う。この際に、運転者が自車両の運転を開始したと判定してから予め設定した抑制時間の間、上記運転支援制御を抑制する。
(もっと読む)
1,141 - 1,150 / 7,349
[ Back to top ]