
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
1,191 - 1,200 / 7,349
車線逸脱防止装置
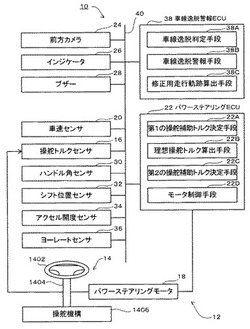
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
対象物検出装置及びプログラム

【課題】ドライバにとって危険度の高い対象物を早期に精度良く検出する。
【解決手段】自車両周辺を撮像した撮像画像、自車両の走行状態を示す情報、及び自車両の周辺状況を示す情報を取得し、取得した情報に基づいて、歩行者が存在する可能性のある危険領域及びその危険領域の領域危険度を推定し、危険領域とその危険領域内に存在すると仮定した歩行者の姿勢との関係に基づいて、姿勢毎の姿勢別危険度を推定し、領域危険度と姿勢別危険度とを乗算して、危険領域×姿勢の総合的な危険度を推定する。総合的な危険度の高い順に危険領域×姿勢に優先度を付与し、優先度順に危険領域×姿勢を選択して危険領域×姿勢の危険領域に対応する撮像画像上の探索範囲からウインドウ画像を抽出し、選択した危険領域×姿勢の姿勢に対応する識別モデルとウインドウ画像とを比較して歩行者か否かを識別する。
(もっと読む)
電子機器及びプログラム
【課題】 見やすく、面白味があることからユーザに注目させやすく、警報内容を容易かつ瞬時・直感的にユーザに認識させること
【解決手段】 自車の位置を検出する位置検出手段で検出された現在位置情報と、データベースに格納された目標物の位置情報とに基づき、自車の周囲に存在する目標物を抽出した場合、仮想のカメラを上空に設置し、視点を斜め下方に向けた状態で映した態様で自車位置を示す立体形状で形成される自車オブジェクトGobと、目標物を示す警報対象オブジェクトKobの双方が表示部内に入るように当該仮想のカメラを動かしながら描画する。そして、警報対象オブジェクトKobは、その目標物の種類に対応した実際の形状を模した形状とすることで、直感的に理解できる。
(もっと読む)
逆変換テーブル生成方法、逆変換テーブル生成プログラム、画像変換装置、画像変換方法、及び画像変換プログラム
【課題】所定の画像に対して視点変換を行う前の画像を取得することを可能とする逆変換テーブル生成方法を提供する。
【解決手段】本逆変換テーブル生成方法は、視点変換画像から当該視点変換画像に係る視点変換処理が行われる前の画像を逆変換画像として生成するための逆変換テーブルT1を生成するための方法であって、制御部11により、視点変換テーブルT2のテーブル座標(a,b)に格納された変換参照座標P(a,b)と逆変換テーブルT1の算出対象のテーブル座標(i,j)との距離L(a,b)を、変換参照座標毎に算出し、視点変換テーブルT2のテーブル座標(a,b)と、このテーブル座標(a,b)に格納された変換参照座標に係る距離L(a,b)と、に基づいて、逆変換テーブルT1の算出対象のテーブル座標(i,j)に格納される逆変換参照座標A(i,j)を算出する。
(もっと読む)
車両用白線認識装置
【課題】車線区画線の内側に補助線が存在する場合や路面上に多くのノイズが存在する場合等においても精度良く車線区画線を検出することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、画像上の白線検出領域A内で水平方向に延在する検索ラインL毎に車幅方向内側から外側に向けて輝度変化を調べ、輝度が暗から明に所定以上変化する最初のエッジ点を第1候補点として検出すると共に、最後のエッジ点を最終候補点として検出し、これら第1候補点からなる点群と最終候補点からなる点群との一致率が高い場合には第1候補点に基づく白線認識を行い、一致率が低い場合には最終候補点に基づく白線認識を行う。
(もっと読む)
横断歩道検出装置及びプログラム
【課題】横断歩道を安定して精度良く検出することができるようにする。
【解決手段】撮像装置12によって、画像を撮像する。ウェーブレット係数計算部20によって、撮影された画像について、水平方向の複数の画素列の各々に対して、所定の周期を持つ複素ウェーブレット基底を水平方向に走査しながら適用して、ウェーブレット係数を走査毎に算出する。横断歩道候補抽出部22によって、複数の画素列の各々について、画素列に対する走査毎のウェーブレット係数の振幅の平均を算出し、算出された各画素列のウェーブレット係数の振幅の平均に基づいて、横断歩道候補領域を抽出する。横断歩道識別部24によって、抽出された横断歩道候補領域から、ウェーブレット係数の振幅の平均が閾値以上となる横断歩道候補領域が、横断歩道領域であると識別する。
(もっと読む)
情報提供装置及び情報提供方法
【課題】乗員により情報提供手段の動作を認識することができる情報提供装置を提供することである。
【解決手段】車両に設置され、乗員に対し情報を提供する情報提供手段と、乗員が注意を向ける注意対象を推定する注意対象推定手段と、乗員の視認可能なエリアを特定する視認エリア特定手段と、エリア内に情報提供手段を含むか否かを判定する判定手段と、判定手段による判定結果に応じて情報提供手段の動作を制御する動作制御手段とを備える。
(もっと読む)
車両接近報知装置
【課題】ドップラー効果による周波数変調の影響を低減することが可能な車両接近報知装置を得る。
【解決手段】車両接近報知装置50は、車両1に搭載されて車両1の接近を報知する車両接近報知装置であって、走行車両に関する所定の報知音を出力する音源15と、車両1の周囲に位置する人物を検出する人物検出部11と、車両1に対して人物が位置する方向を検出する方向検出部12と、車両1と人物との相対速度を算出する相対速度算出部14と、車両1と人物との位置関係及び相対速度に基づいて、ドップラー効果による周波数変調の影響が低減されるように報知音を補正する周波数補正部16A〜16Dと、周波数補正部16A〜16Dによって補正された報知音を、人物が位置する方向に向けて送出するスピーカ3A〜3Dと、を備える。
(もっと読む)
車両用危険度算出装置
【課題】計算工程を削減して、演算処理にかかる時間を短縮することが可能な車両用危険度算出装置を提供すること。
【解決手段】自車両周辺の走行環境を認識し、認識された走行環境情報に基づいて、自車のリスクポテンシャルと自車周囲の対象物リスクポテンシャルとの重なりである両者の衝突危険度を演算する。そして、自車の車幅方向の中心が横軸の中心として設定されたグリッド状のマップを用いて、位置ごとに衝突危険度を表現するリスクポテンシャルマップを生成する。これにより、縦軸と横軸が交差する基準点(ゼロ点)に、自車の車幅方向の中心を設定して、リスクポテンシャルの分布状況を表すことが可能となる。それため、自車位置から一定範囲の領域における衝突危険度の積算値を算出する際に、1点のメモリアクセスを実行して算出することが可能となる。
(もっと読む)
前方領域検出装置及び車両制御装置
【課題】他車両の灯火か路側物からの反射光かを精度良く判別して、前照灯の照射方向などの好適な自車両の制御を行うことができる前方領域検出装置及び車両制御装置を提供すること。
【解決手段】画像を無限遠点を通る区分ラインで左右に区分し、左領域では画素の輝度の判別のための閾値を高くし、右領域ではその閾値を小さくする。そして、ステップ100では、前方カメラ1から撮影した画像の各画素のデータを入力する。ステップ110では、各画素のデータが、画像の左領域のデータか右領域のデータかを判別する。ステップ120では、左領域のデータであるので、その明るさの値が(右領域の閾値Bより大きな)閾値A以上か否かを判定する。一方、ステップ140では、右領域のデータであるので、その明るさの値が、(左領域の閾値Aより小さな)閾値B以上か否かを判定する。
(もっと読む)
1,191 - 1,200 / 7,349
[ Back to top ]