
国際特許分類[H01L21/677]の内容
電気 (1,674,590) | 基本的電気素子 (808,144) | 半導体装置,他に属さない電気的固体装置 (445,984) | 半導体装置または固体装置またはそれらの部品の製造または処理に特に適用される方法または装置 (183,847) | 製造または処理中の半導体または電気的固体装置の取扱いに特に適用される装置;半導体または電気的固体装置もしくは構成部品の製造または処理中のウエハの取扱いに特に適用される装置 (11,346) | 移送のためのもの,例.異なるワ―クステーション間での移送 (4,133)
国際特許分類[H01L21/677]に分類される特許
31 - 40 / 4,133
薄板状ワーク搬送装置及び薄板状ワーク搬送方法
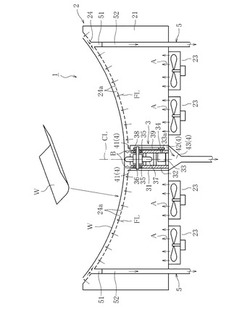
【課題】薄板状ワークがより薄くても、この薄板状ワークに移動力を確実に伝えて滞りなくそして蛇行なく安定して搬送することが可能である薄板状ワーク搬送装置及び薄板状ワーク搬送方法を提供する。
【解決手段】ガラス基板Wの下面に空気を吹き付けて非接触状態で支持するエア浮上ユニット2と、ガラス基板Wの下面に接触してワーク搬送方向の移動力を付与する搬送ローラ37を備え、エア浮上ユニット2は、ガラス基板Wの下面に向けて空気を噴出させる多数の空気噴出孔24aを有し、且つ、ワーク搬送方向と直交する断面形状が下方に凸の湾曲形状を成すワーク非接触支持板24を具備し、搬送ローラ37をワーク搬送方向と直交する方向の中央に配置して、エア浮上ユニット2のワーク非接触支持板24から上方に突出する周縁部をガラス基板Wの下面に接触させてワーク搬送方向の移動力を付与する。
(もっと読む)
産業用ロボット

【課題】温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能な産業用ロボットを提供する。
【解決手段】この産業用ロボットは、搬送対象物が搭載される搭載部27を有するハンド3と、その先端側でハンド3を保持するアームと、アームの基端側を保持する本体部と、搭載部27の少なくとも上面を覆うカバー部材30とを備えている。カバー部材30における輻射熱の反射率は、搭載部27における輻射熱の反射率よりも高く、カバー部材30の熱伝導率は、搭載部27の熱伝導率よりも低く、搭載部27の比重は、カバー部材30の比重よりも小さくなっている。
(もっと読む)
基板処理装置
【課題】複数枚の基板を収容した搬送容器が載置されるロードポートと、搬送容器を保管する容器保管部と、を備えた基板処理装置において、ロードポートにおける搬送容器の受け渡し回数の増大を図ることができ、これにより基板を高いスループットで処理することのできる基板処理装置を提供する。
【解決手段】搬送路102、102Bに沿って、複数枚の基板を収容した搬送容器10を搬送する搬送装置104A、104Bを利用した搬送容器10の受け渡しが行われる第1のロードポート21と、この第1のロードポート21に対して階段状に設けられた第2のロードポート22とを備えている。
(もっと読む)
処理ステージ装置及びそれを用いる塗布処理装置
【課題】被処理基板の処理ステージ装置及びそれを用いる塗布処理装置において、処理動作のタクトタイムを短縮する。
【解決手段】基板搬入部2は、ガラス基板Gを水平に搬送可能な第1の基板搬送部5Bと、前記第1の基板搬送部を少なくとも基板搬送方向に沿って前後方向と斜め上下方向と垂直上下方向とのいずれかに移動させる第1の進退手段10とを有し、前記基板処理部は、ステージ15と、前記ステージの載置面に対し相対的に昇降可能に設けられ、上昇位置において前記基板を水平に搬送可能な第2の基板搬送部16と、前記ステージの載置面に対し前記第2の基板搬送部を相対的に昇降させる第2の進退手段24,25とを有し、前記基板搬出部は、前記被処理基板を水平に搬送可能な第3の基板搬送部29と、前記第3の基板搬送部を少なくとも基板搬送方向に沿って前後方向と斜め上下方向と垂直上下方向とのいずれかに移動させる第3の進退手段30とを有する。
(もっと読む)
エネルギー線照射装置及びワーク搬送機構
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
カセットを位置合わせするための方法と装置
【課題】自動ワーク取扱システムにおけるワーク用のカセットを位置合わせするための方法及び装置を得ることを目的とする。
【解決手段】この方法では、ワーク取扱システムにおいて、輪セットハンドラをロボットブレードに位置合わせする。カセットハンドラは、ワークを担持するための複数のスロットを有するワークカセットを支持するための支持面を有する。この方法は、フレームを前記カセットハンドラ支持面に配置するステップと、ロボットブレードによって担持されるワークを移動するステップと、フレームに対するロボットフレームによって担持されるワークの動作をマッピングするステップとを有する。
(もっと読む)
研磨装置において基板を監視する方法及び研磨システムで基板を搬送する方法
【課題】研磨装置において二枚以上の基板を監視する方法を提供する。
【解決手段】研磨装置において二枚以上の基板を監視する方法が、第1の方向に第1基板を移動させ、監視システムの隣りに配置されたバッファステーション内に当該第1基板を移動させるステップと、第1の方向に直角な第2の方向に前記第1基板を移動させて、第1基板に対して監視プロセスを行うステップと、第2基板を取り出してバッファステーション内に移動させるステップと、第1基板を前記バッファステーションから取り出すステップと、を備える。
(もっと読む)
基板処理装置及び基板処理方法
【課題】製造プロセス中のウエハの反りを防止する。
【解決手段】基板処理装置は、ウエハにおける、サポートプレートが貼り付けられている面とは反対側の被支持面の内周部を支持する支持ピンにより支持された積層体を減圧環境下において搬送する搬送ユニット20とを備え、製造プロセス中のウエハの反りを防止することを可能とした。
(もっと読む)
搬送装置
【課題】円板状板状物の中心がずれた状態の円板状板状物ユニットでも、搬送先のチャックテーブルに中心を位置合わせして搬送可能な搬送装置を提供する。
【解決手段】環状フレームFに円板状板状物の貼着された円板状板状物ユニットを搬送先のチャックテーブルへ搬送する装置2は、前記円板状板状物ユニットの吸引保持と該チャックテーブルの中心位置合わせを行なう吸引保持位置合わせ機構と、該吸引保持位置合わせ機構の移動機構とを具備し、前記吸引保持位置合わせ機構は、環状フレームFを吸引保持する吸引保持部46と、前記円板状板状物ユニットの前記円板状板状物の外周側面に作用する複数の爪30を待機位置と互いに半径方向に接近した作用位置との間で移動させることで、前記チャックテーブルの中心に位置付けする手段と、吸引保持部46を吸引保持位置とその上方の退避位置とに位置付ける吸引保持部位置付け手段18とを含む。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】リソグラフィ装置においてウェーハの露光前の熱調整を改善または簡易化する。
【解決手段】 リソグラフィ装置は、基板を保持するように構築された基板テーブルと、基板テーブルを受けるように構成された区画と、露光対象の基板を受け取り、かつ該基板を熱調整するように配置された熱調整ユニットと、熱調整された基板を基板テーブルへ移送するように構成された移送システムと、を備え、基板テーブルおよび熱調整ユニットは、少なくとも熱調整された基板が熱調整ユニットから基板テーブルへ移送される間、リソグラフィ装置の前記区画内に配置される。
(もっと読む)
31 - 40 / 4,133
[ Back to top ]