
国際特許分類[H01L21/677]の内容
電気 (1,674,590) | 基本的電気素子 (808,144) | 半導体装置,他に属さない電気的固体装置 (445,984) | 半導体装置または固体装置またはそれらの部品の製造または処理に特に適用される方法または装置 (183,847) | 製造または処理中の半導体または電気的固体装置の取扱いに特に適用される装置;半導体または電気的固体装置もしくは構成部品の製造または処理中のウエハの取扱いに特に適用される装置 (11,346) | 移送のためのもの,例.異なるワ―クステーション間での移送 (4,133)
国際特許分類[H01L21/677]に分類される特許
71 - 80 / 4,133
基板処理装置及び基板処理方法並びに基板処理プログラムを記憶したコンピュータ読み取り可能な記憶媒体
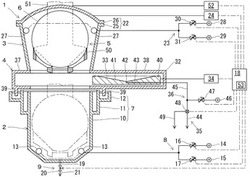
【課題】基板の液処理時に遮蔽扉に付着した処理液によって、基板の乾燥処理時にパーティクルが発生してしまうのを防止すること。
【解決手段】本発明では、基板処理装置(1)において、処理液で基板(6)の液処理を行う液処理槽(7)と、前記液処理槽(7)の上方に設けられ、前記基板(6)の乾燥処理を行う乾燥処理槽(22)と、前記液処理槽(7)と乾燥処理槽(22)との間に設けられ、前記液処理槽(7)と乾燥処理槽(22)とを遮蔽可能な遮蔽扉(33)と、前記液処理槽(7)と乾燥処理槽(22)との間で前記基板(6)の搬送を行う基板搬送手段(5)と、前記遮蔽扉(33)に洗浄液を供給する洗浄液供給手段(36)とを設けることにした。
(もっと読む)
基板トレイ及び基板処理装置

【課題】基板搬送システムの構造設計上の自由度を向上させる基板トレイ及び基板処理装置を提供する。
【解決手段】基板Wを内側に収容する収容孔11を複数有し、複数の基板Wと共にロボットアーム20により搬送される円形状の基板トレイ10において、ロボットアーム20の挿入方向Dと反対の方向側となる一方の半円の領域10bで、他方の半円の領域10aより収容孔11の数を少なくすることにより、一方の半円の領域10bの重さを、他方の半円の領域10aの重さより重くし、これにより、基板トレイ10及び複数の基板Wによる重心G2の位置を、基板トレイ10の中心Cから、ロボットアーム20の挿入方向Dと反対の方向に移動させた。
(もっと読む)
板状被処理材の取扱装置
【課題】他の装置との非干渉領域を拡大して作業性と安全性を大幅に改善する板状被処理材の取扱装置を提供する。
【解決手段】水平走行本体HSに旋回ポストCPを装着し、旋回ポストCPに水平旋回アームCAを装着し、その先端に旋回首振可能に横断面がコ字型の竪フレームTFを連結装着し、竪フレームTFの下端部に長尺ボックスTBを傾動可能に装着する回動駆動連結機構XKを設け、長尺ボックスTBに板状被処理材Wの下端縁と上端縁を上下の挟持爪HTで挟持支持・開放する挟持爪機構KKを装着し、挟持爪機構KKは、長尺ボックスTB内に上下駆動機構を内装し、長尺ボックスTBの外側の縦長手方向に移動可能に左右一対の爪保持リングTRを設け、爪保持リングTRの前面に上下一対の挟持爪HTを装着し、爪保持リングTRの後部を長尺ボックスTBの後側からボックスTB内に挿入し挿入部をスクリューに連結してなる。
(もっと読む)
塗布処理装置
【課題】処理動作のタクトタイムを短縮することができ、且つ、ノズルのメンテナンス処理に起因する被処理基板の汚染を防止する。
【解決手段】被処理基板Gの幅方向に延びる吐出口を有し、前記処理ステージ上の前記基板の上方を基板搬送方向に沿って移動されると共に、前記吐出口から前記基板上に処理液を吐出するノズル31と、前記ノズルを昇降移動可能であって、前記ノズルを基板搬送方向上流側または下流側に向けて移動可能なノズル移動手段32と、基板搬送路4の下方に設けられ、前記ノズルの吐出口の状態を整えるノズルメンテナンス手段35と、前記基板搬送路において前記処理ステージの上流側または下流側に所定長さの空き区間dを出没自在に形成可能な空き区間形成手段21,22,23A、23B、30とを備える。
(もっと読む)
チャック装置およびチャック方法
【課題】可撓性を有するワークを非接触で安定的にチャックすることができるチャック装置およびチャック方法を提供する。
【解決手段】可撓性を有するワークWを保持するチャック装置であって、ワークWの鉛直上方に位置して当該ワークWを非接触状態で吸引するベルヌーイチャック機構4と、当該ベルヌーイチャック機構4を挟んで水平面上に対向配置され、当該ベルヌーイチャック機構4による吸引力で浮上するとともに自重で撓んだワークWの側縁W2を挟持し、当該側縁W2よりも中央部W1が鉛直上方に位置する湾曲姿勢にワークWを保持する一対の保持手段10と、を備える。
(もっと読む)
LED素子のソーティング装置
【課題】検査工程と整列工程を1台の設備で行うことによって工数削減と設備費のコストダウン及び設置スペースの縮小を図ることができるLED素子のソーティング装置を提供すること。
【解決手段】半導体ウエハ2を裁断して得られる複数のLED素子3の各特性をそれぞれ検査するとともに、各LED素子3の位置をそれぞれ検出し、各LED素子3をその特性データと位置データに基づいて各ランク毎に整列させてシート4上に貼付するLED素子3のソーティング装置1を、放射状に延びる複数のアーム11を備えた回転可能且つ上下動可能なインデックスユニット10を設け、該インデックスユニット10の前記各アーム11を回転及び上下動させてその先端に前記LED素子3を吸着しつつ、該LED素子3の位置検出と特性の検査、各ランク毎の整列及びシートへの貼付を順次行うよう構成する。
(もっと読む)
基板の搬送システム
【課題】水平方向へのレイアウトの拡大を抑制できる基板の搬送システムを提供する。
【解決手段】搬送システム1は、ロボット7Aにて搬入及び搬出される基板Sが置かれる搬入用スペース12A及び搬出用スペース13Aが上下方向に配置された受け渡しステーション9Aと、ロボット7Bにて搬入及び搬出される基板Sが置かれる搬入用スペース12B及び搬出用スペース13Bが上下方向に配置された受け渡しステーション9Bと、露光前の基板Sを各搬入用スペースへ移送する移送ロボット10Aと、搬出用スペース13Bの基板Sを下流側セクションSC2へ移送する移送ロボット10Bとを備え、移送ロボット10Aは搬出用スペース13Aの基板Sを第2受け渡しステーション9Bに配置された中継スペース14へ移送し、移送ロボット10Bは中継スペース14の基板Sを下流側セクションSC2に移送する。
(もっと読む)
基板搬送装置及び転動ユニット
【課題】基板のサイズに応じて載置搬送することが可能な基板搬送装置及び基板搬送装置に用いられる転動ユニットを提供する。
【解決手段】従動筒614が突起613のガイド溝619内の滑り移動と共に回転軸612に相対して基板3側に向かって滑り移動されると、第1のローラー615が基板3に向かって前進する。第1のローラー615の前進運動により第1のローラー615は基板3と接触して基板3が載置される。そして、従動筒614が突起613のガイド溝619内の滑り移動と共に回転軸612に相対して基板3が離脱するように滑り移動されると、第1のローラー615が基板3から遠ざかるように後退する。第1のローラー615の後退運動により第1のローラー615は基板3から離脱して遠ざかる。
(もっと読む)
搬送ロボット及び真空装置
【課題】複数の搬送機構を有する搬送ロボットにおいて、スループットを向上させるとともに、搬送ロボット及びこれを配置する真空装置の高さを低く抑える技術を提供する。
【解決手段】第1及び第2の駆動軸11、12に固定された第1及び第2の上側駆動アーム21、22によって構成される上側搬送機構1Aと、第2及び第3の駆動軸12、13に固定された第1及び第2の下側駆動アーム51、52によって構成される下側搬送機構1Bとを有する。第1〜3の駆動軸11〜13は同心状に設けられている。上側搬送機構1Aは、第1の上側平行クランク機構4と第2の上側平行クランク機構5とによって構成される。下側搬送機構1Bは、第1の下側平行クランク機構6と第2の下側平行クランク機構7とによって構成される。
(もっと読む)
搬送ロボット及び真空装置
【課題】複数の搬送機構を有する搬送ロボットにおいて、スループットを向上させるとともに、搬送ロボット及びこれを配置する真空装置の高さを低く抑える技術を提供する。
【解決手段】回転軸Oを中心として同心状に配置され水平面内でそれぞれ独立して回転可能に設けられた第1〜3の駆動軸11〜13と、第1の駆動軸11によって駆動されて伸縮する上側搬送機構1Aと、上側搬送機構1Aに対して下方に配置されるとともに、第2の駆動軸12によって駆動されて伸縮する左下側搬送機構2Lと、上側搬送機構1Aに対して下方で左下側搬送機構2Lと同じ高さ位置に配置されるとともに、第3の駆動軸13によって駆動されて伸縮する右下側搬送機構2Rとを備える。左下側搬送機構2Lと、右下側搬送機構2Rとが、第1〜第3の駆動軸11〜13を挟んで基板搬送方向Pの両側に配置されている。
(もっと読む)
71 - 80 / 4,133
[ Back to top ]