
国際特許分類[H02P5/74]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 2以上の電動機の速度またはトルク調整または制御に特に適した装置 (756) | 2以上の交流電動機を制御するもの (297)
国際特許分類[H02P5/74]の下位に属する分類
国際特許分類[H02P5/74]に分類される特許
41 - 50 / 288
冷凍装置の電力制御基板
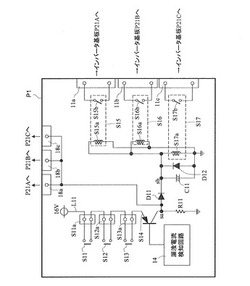
【課題】安価かつ簡単な手法により、確実にモータへの電源供給を遮断すること。
【解決手段】第1インターフェース11a〜11cは、電源スイッチ22及びモータ駆動用のインバータ部21aが実装された複数のインバータ基板P21A〜P21Cと接続される。異常検知スイッチS11〜S13は、圧縮機に関する異常が有る場合にはオフ、異常がない場合にはオンとなる。状態変化スイッチS15〜S17は、各第1インターフェース11a〜11cを介して電源スイッチ22と電気的に接続されており、異常検知スイッチS11〜S13のオン/オフに応じてオン/オフすることで、電源スイッチ22をオンまたはオフに変化させる。複数の異常検知スイッチS11〜S13の少なくとも1つがオンからオフとなった時、状態変化スイッチS15〜S17は、複数のインバータ基板P21〜P21C全ての電源スイッチ22をオンからオフに変化させる。
(もっと読む)
電動作業機

【課題】商用電力系統等の外部電源からの電力で蓄電要素を充電する際の利便性を向上させることができ、しかも、従来に比べて回路構成を簡素化できる電気駆動装置を備えた電動作業機を提供する。
【解決手段】蓄電要素BTから同一の直流電圧が供給され、複数のモータM,…をそれぞれ駆動する複数のインバータ11,…を有する電気駆動装置10を備えた電動作業機100は、第1レグ群G1と接続レグ群Gnとの間を電気的に導通及び遮断する第1開閉手段SWaを備え、第1レグ群G1のレグLG1の中点と第2レグ群G2のレグLG6の中点との間に第1インダクタL1を接続する第1接続端子T1,T2と、第3レグ群G3のレグLG7の中点と第4レグ群G4のレグLG12の中点との間に第2インダクタL2を介して外部電源PWに接続する第2接続端子T3,T4とを有している。
(もっと読む)
モータ駆動装置およびそれを搭載する車両
【課題】複数の電力変換装置を含むモータ駆動装置において、複雑な制御ロジックを用いることなく損失を低減する。
【解決手段】モータ駆動装置20は、電力変換装置であるコンバータ12およびインバータ14,22と、ECU30とを備え、蓄電装置28からの電力を用いてモータジェネレータMG1,MG2を駆動する。ECU30は、インバータ14,22に供給されるシステム電圧VHにおける各電力変換装置の損失を演算するとともに、得られた損失が最大となる電力変換装置において生じる損失が、当該電力変換装置についての駆動指令値が達成可能な範囲で最小となるように、システム電圧VHの電圧指令値を設定する。
(もっと読む)
複数台運転ファン駆動装置およびその故障処理方法
【課題】複数台運転ファン駆動装置において、異常発生によりファンモータが停止しても、トータルのファンモータから発生する風量の低下を抑える。
【解決手段】ファンモータ駆動回路11〜14に回転速度指令16を与え、ファンモータ駆動回路11〜14から異常信号17を受けるよう構成された回転速度指令演算部15を備え、ファンモータ駆動回路11〜14の1つから異常信号17を受けたとき、残りの運転可能なファンモータ21〜24に対する回転速度指令16の値を上昇させて、異常発生前のファンモータ21〜24によって得られていたトータルの風量が変わらないようにしている。
(もっと読む)
モータ制御システム
【課題】定格出力が異なる2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、小出力及び大出力モータ4a,4bの全体のモータ効率に基づいて予め設定された第1〜第4領域の境界を示す境界トルクTx〜Tzが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx〜Tzとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が第1領域の場合には、小出力モータ4aのみを駆動し、第2領域の場合には、小出力モータ4aが最大トルクTamaxを出力する状態で2つのモータ4a,4bを駆動し、第3領域の場合には、大出力モータ4bのみを駆動し、第4領域の場合には、小出力モータ4aが最大トルクTamaxを出力する状態で2つのモータ4a,4bを駆動する。
(もっと読む)
電気車用駆動回路
【課題】チョッパ回路を1台として回路が大型化しないようにし、これが故障した場合でも、架線がない区間での自力走行を可能とする
【解決手段】複数台設けられるインバータの、例えば62の出力に接続される交流電動機72の巻線の中性点と蓄電装置9との間にスイッチ11を設け、少なくともチョッパ回路8およびその制御装置が故障したときは、スイッチ10a,10bをオフにしてチョッパ回路8を切り離すとともにスイッチ11をオンにし、インバータ出力をスイッチ11を介して蓄電装置9に接続し、インバータ62をチョッパ回路として動作させるようにする。
(もっと読む)
ネット制御の電動モータ
【課題】 従来のモータユニットでは、各モータに専用のインバータを備え、複数台を並設しているが、各モータに停止する位置決めとか、正転逆転で移動して距離を出すネットワーク制御をするには複雑な回線になり、制御の作成時間も掛かり、ミスの発見も難しくなり事故の原因になる欠点があった。本発明では、別途に第二制御盤を備え、第一制御盤を補助する構成とするネットワーク制御を提供する。
【解決手段】 本発明では、複数台の駆動部をネットワーク回線で連結し、パソコン20で一括管理する制御回路において、前記駆動部は、インバータを介して電動モータ8をネットワーク回線により形成する第一制御盤12を備え、前記電動モータ8を補助する回転環境を制御可能にする第二制御盤13を備え、前記第一制御盤12に第二制御盤13を連結して、電動モータ8の回転で搬送物を指定位置に移動可能にする構成とする。
(もっと読む)
電気車用駆動回路
【課題】チョッパ回路を1台として回路が大型化しないようにし、これが故障した場合でも、架線がない区間での自力走行を可能とする
【解決手段】複数台設けられるインバータの、例えば62の出力に接続される交流電動機72の巻線の中性点と蓄電装置9との間にスイッチ11を設け、少なくともチョッパ回路8およびその制御装置が故障したときは、スイッチ10a,10bをオフにしてチョッパ回路8を切り離すとともに、スイッチ11をオフにしインバータ出力をスイッチ12を介して蓄電装置9に接続し、インバータ62をチョッパ回路として動作させるようにする。
(もっと読む)
電動車両の駆動力制御装置
【課題】各モータの駆動状態を適切に保持しながら、目標とする車両運動を最大限に実現可能とする電動車両を提供すること。
【解決手段】複数の車輪107を独立して駆動する複数のモータ106と、駆動力指令値に基づいて各モータへの駆動電流を制御する複数のインバータ105とを備える電動車両の駆動力制御装置10において、各モータごとに算出した目標駆動力で駆動したとき、各モータを所望の動作範囲内で稼働できるか否かを判定する判定部12と、判定部で各モータを所望の動作範囲内で稼働できないと判定されたとき、各モータを所望の動作範囲内で稼働するために、各モータごとの目標駆動力及び各モータの稼働状態に基づいて各モータの駆動力配分を調整し、各モータごとの実際の駆動力指令値を算出する駆動力指令値算出部13と、複数のインバータに対して駆動力指令値をそれぞれ出力する指令値出力部14とを備える。
(もっと読む)
負荷制御装置
【課題】2つの回転型誘導性負荷の磁極位置を短時間で導出すること。
【解決手段】負荷制御装置は、直流電圧を交流電圧に変換して、同じ諸元の2つの回転型誘導性負荷に印加する2つの電力変換部と、電力変換部に供給される直流電流を検出する電流検出部と、電力変換部を制御する制御部とを備える。制御部は、2つの負荷に同一の電圧ベクトルを所定の角度毎に電気角度で一周期分、同時に入力するよう制御し、電流検出部が検出した直流電流及びそのときの電圧ベクトルの角度に基づいて、2つの負荷における総δ軸電流を算出し、一点の角度の電圧ベクトルを一方の負荷に入力するよう制御し、このとき電流検出部が検出した直流電流及び一点の角度の電圧ベクトルに応じた負荷におけるδ軸電流を算出し、総δ軸電流に関するパラメータ、一点の角度、及び一点の角度に応じたδ軸電流に基づいて、2つの負荷の各電流応答を算出し、当該電流応答の位相成分から各負荷の磁極位置を導出する。
(もっと読む)
41 - 50 / 288
[ Back to top ]