
動作計測装置

【構成】 動作計測システム10は複数のセンサ装置12を含み、複数のセンサ装置12は被験者の所定の部位に装着される。コンピュータ18からの指示に従って被験者は所定の動作を行う。このとき、各センサ装置12から出力される加速度データがセンサ装置12からコンピュータ18に送信される。コンピュータ18は、各センサ装置12からの加速度データに基づいて、当該各センサ装置12の装着位置を決定する。また、各センサ装置を所定の部位に正しい方向で装着した場合に、所定の動作を行ったときの加速度データが基準データとして記憶されており、コンピュータ18は、この基準データと今回検出した加速度データとから被験者の装着状態に対する補正値を算出し、その後、補正値を用いて加速度データを補正する。
【効果】 被験者の動作を正しく計測することができる。
【効果】 被験者の動作を正しく計測することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は動作計測装置に関し、特にたとえば、所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する、動作計測装置に関する。
【背景技術】
【0002】
従来のこの種の動作計測装置の一例が特許文献1に開示される。この特許文献1に開示される行動検知装置では、人体への装着面に2つのCCD素子が設けられる。この2つのCCD素子のそれぞれが検出したそれぞれの移動ベクトルを判定し、移動ベクトルが互いに逆の方向を示している場合には、行動検知装置がその中心点を中心に回転していることとなる。そして、行動検知装置が回転している場合には、回転方向の機器ずれを検知して加速度出力を補正する。
【特許文献1】特開2005−172625
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、背景技術では、行動検知装置を装着したときに、既に正しい装着状態から回転してしまっている場合には、その後に検出された回転方向の機器ずれに基づいて加速度出力を補正したとしても、行動検知装置を装着したときの装着状態での加速度を検出できるに留まり、正しい装着状態(姿勢)での加速度を検出することができない。また、この背景技術では、CCD素子が配置される2次元平面内での回転については補正可能であるが、そのような2次元平面と交差する方向の回転すなわち3次元的な回転があっても加速度を補正することができない。つまり、被験者の行動を正確に計測(検出)することができない。
【0004】
それゆえに、この発明の主たる目的は、新規な、動作計測装置を提供することである。
【0005】
この発明の他の目的は、正確に動作を計測できる、動作計測装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0007】
請求項1の発明は、所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する動作計測装置であって、所定の方向で加速度センサを被験者の所定の部位に装着し、当該被験者が所定の動作を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する基準データ記憶手段、所定の部位に加速度センサを装着した被験者が所定の動作を行うとき、当該加速度センサからの加速度データを検出する加速度データ検出手段、および加速度データ検出手段によって検出された加速度データと、基準データ記憶手段に記憶された基準データとに基づいて、加速度センサからの加速度データを補正するための補正値を算出する補正値算出手段を備える、動作計測装置である。
【0008】
請求項1の発明では、動作計測装置(18)は、所定の部位(たとえば、右手,左手,右足,左足)に加速度センサ(32)の装着された被験者の動作についての動作データを検出して動作データ記憶手段(20)に記憶する。基準データ記憶手段(20)は、所定の方向(基準となる方向)で加速度センサを被験者の所定の部位に装着し、当該被験者が所定の動作(たとえば、右手を上げる、左手を上げる、右足を前に出す、左足を前に出す)を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する。また、加速度データ検出手段(18,S5)は、所定の部位に加速度センサを装着した被験者が所定の動作を行うとき、当該加速度センサからの加速度データを検出する。補正値算出手段(18,S27,S29,S31,S33)は、加速度データ検出手段によって検出された加速度データと、基準データ記憶手段に記憶された基準データとに基づいて、加速度センサからの加速度データを補正するための補正値を算出する。
【0009】
請求項1の発明によれば、検出した加速度データと予め記憶してある基準データとに基づいて補正値を算出するので、この補正値を用いることにより、それ以降に検出される加速度データを補正すれば、所定の方向で加速度センサを装着した状態とほぼ同じ動作データを検出することができる。つまり、正確に動作を計測することができる。
【0010】
請求項2の発明は請求項1に従属し、基準データ記憶手段は、複数の加速度センサのそれぞれを所定の方向で被験者の複数の所定の部位にそれぞれ装着したときに、当該複数の加速度センサからの加速度データをそれぞれの基準データとして予め記憶し、複数の加速度センサを被験者の複数の所定の部位のそれぞれに装着したとき、加速度データ検出手段は複数の加速度センサからの加速度データをそれぞれ検出し、補正値算出手段は、複数の加速度センサからの加速度データのそれぞれと、当該加速度データと対応する基準データのそれぞれとに基づいて、それぞれの加速度データを補正するための補正値を当該複数の加速度センサのそれぞれについて算出する。
【0011】
請求項2の発明では、複数の加速度センサが、被験者の複数の部位(たとえば、両手首および両足首)に装着される。したがって、基準データも各部位について予め記憶される。補正値算出手段は、各部位に装着された加速度センサのそれぞれについての補正値を算出する。
【0012】
請求項2の発明においても、請求項1の発明と同様に、正確に動作を計測することができる。
【0013】
請求項3の発明は請求項2に従属し、加速度センサが装着されるべき部位のそれぞれに対応して所定の閾値を記憶する閾値記憶手段、閾値記憶手段に記憶された所定の閾値と、加速度データ検出手段によって検出された加速度データの最大変化量とを比較する比較手段、および比較手段の結果、最大変化量が所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する部位決定手段をさらに備える。
【0014】
請求項3の発明では、閾値記憶手段(20)、比較手段(18,S11)および部位決定手段(18,S19)がさらに設けられる。閾値記憶手段は、加速度センサが装着されるべき部位のそれぞれに対応して所定の閾値を記憶する。比較手段は、閾値記憶手段に記憶された所定の閾値と、加速度データ検出手段によって検出された加速度データの最大変化量とを比較する。部位決定手段は、最大変化量が所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する。つまり、被験者に所定の動作を行わせることにより、動きの大きい部位と、出力の変化が大きい加速度センサとを対応付けるのである。
【0015】
請求項3の発明によれば、加速度センサとその装着位置とを対応付けるので、全て同じ加速度センサを用意すれば足り、特定の加速度センサを特定の部位に装着するなどの対応づけを特にする必要がない。つまり、被験者が加速度センサを装着する場合の煩わしさを軽減することができる。
【0016】
請求項4の発明は請求項1ないし3のいずれかに従属し、補正値算出手段は、加速度センサを所定の方向で被験者に装着した状態からの回転角度に関する補正値を算出する。
【0017】
請求項4の発明では、補正値算出手段は、加速度センサを所定の方向で被験者に装着した状態からの回転角度(ずれ)を補正する補正値を算出する。たとえば、回転角度は、3次元の回転についての角度である。
【0018】
請求項4の発明によれば、装着された加速度センサの回転角度を補正するので、装着方向に拘わらず、正しい装着状態と同等の動作データを計測することができる。
【発明の効果】
【0019】
この発明によれば、検出した加速度データと予め記憶してある基準データとに基づいて補正値を算出するので、この補正値を用いることにより、それ以降に検出される加速度データを補正すれば、正しい方向で加速度センサを装着した状態とほぼ同じ動作データを検出することができる。つまり、正確に動作を計測することができる。
【0020】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【発明を実施するための最良の形態】
【0021】
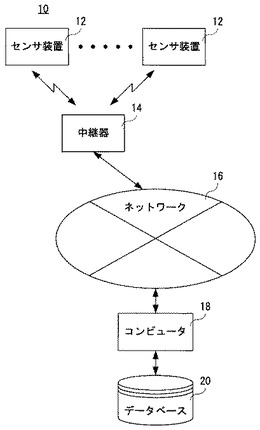
図1を参照して、この実施例の動作計測システム10は、複数のセンサ装置12を含み、各センサ装置12は被験者の所定の部位に装着される(図5参照)。この実施例では、被験者の様々な動作を計測するようにするため、複数のセンサ装置12を被験者に装着するようにしてあるが、歩行動作だけを計測するように、単純な動作のみを検出する場合には、センサ装置12を1つ装着するようにしてもよい。
【0022】
また、動作計測システム10は、中継器14を含み、上述したセンサ装置12と中継器14とが無線通信可能に接続される。この実施例では、センサ装置12および中継器14を被験者に装着するため、被験者の動作の邪魔にならないように、センサ装置12と中継器14との間で無線により通信するようにしてあるが、有線接続されてもよいことは勿論である。図示は省略するが、この実施例では、中継器14もまた、被験者の動作の邪魔にならないように、無線により、アクセスポイントを介してネットワーク16に接続される。ただし、中継器14は、ネットワーク16に有線接続されるようにしてもよい。図示は省略するが、被験者が様々な場所に存在(移動)する場合には、各場所や移動経路に、それぞれアクセスポイントが設けられる。
【0023】
さらに、動作計測システム10は、ネットワーク16を含み、センサ装置12は、中継器14およびネットワーク16を介して、コンピュータ18に通信可能に接続される。コンピュータ18は、PC或いはPDAのような汎用のコンピュータであり、この実施例では、コンピュータ18は動作計測装置として機能する。また、コンピュータ18には、データベース20が接続される。ただし、センサ装置12は、コンピュータ18が無線通信機能を備える場合には、当該コンピュータ18との間で直接通信することも可能である。
【0024】
なお、この実施例では、データベース20は、コンピュータ18に直接接続するように示してあるが、ネットワーク16を介して通信可能に接続するようにしてもよい。また、図示は省略するが、コンピュータ18の内部メモリ(ハードディスク,ROM,RAM)をデータベース20として用いるようにしてもよい。
【0025】
図2(A)および(B)に示すように、データベース20には、基準データのテーブルおよびセンサ装着の識別テーブルについてのデータが記憶される。ただし、センサ装置の識別テーブルは、被験者の動作の計測を開始するとき作成される。
【0026】
図2(A)に示す基準データのテーブルは、後述するように、正しい向き(基準の状態)でセンサ装置12を被験者に装着し、当該被験者が所定の動作を行った場合に、各センサ装置12から出力される加速度データが基準データとして各動作に対応づけて記憶されている。ここで、図2(A)からも分かるように、所定の動作は、「右手を上げる」、「左手を上げる」、「右足を前に出す」および「左足を前に出す」の4種類である。また、基準データは、厳密に言うと、各センサ装置12の加速度データが示す加速度を軸(X軸,Y軸,Z軸)毎に平均した平均値のデータである。したがって、平均値は、センサ装置12毎に算出され、全センサ装置12についての平均値ではない。
【0027】
また、基準データは、センサ装置12が装着される部位毎に記述される。したがって、基準データは、対応する部位に装着されたセンサ装置12で検出される加速度の平均値についてのデータである。具体的には、「右手を上げる」に対応して、右手首に正しく装着されたセンサ装置12の加速度の平均値(XA,YA,ZA)のデータが記憶される。また、「左手を上げる」に対応して、左手首に正しく装着されたセンサ装置12の加速度の平均値(XB,YB,ZB)のデータが記憶される。さらに、「右足を前に出す」に対応して、右足首に正しく装着されたセンサ装置12の加速度の平均値(XC,YC,ZC)のデータが記憶される。さらにまた、「左足を前に出す」に対応して、左足首に正しく装着されたセンサ装置12の加速度の平均値(XD,YD,ZD)のデータが記憶される。
【0028】
さらに、所定の動作のそれぞれに対応して、それぞれのセンサ装置12が装着された部位を識別(決定)するための閾値が記憶される。図2(A)に示す例では、「右手首」に対応して閾値1が記憶され、「左手首」に対応して閾値3が記憶され、「右足首」に対応して閾値4が記憶され、そして、「左足首」に対応して閾値2が記憶される。ただし、閾値1−4は実験により経験的に得られた数値である。したがって、閾値1−4は、使用する加速度センサの種類や被験者等によって適宜変更されるべきである。
【0029】
また、データベース20には、センサ装置の識別テーブルのデータが記憶される。このセンサ装置の識別テーブルでは、被験者の部位に対応して、当該部位に装着されたセンサ装置12の識別情報が記憶される。たとえば、各センサ装置12から送信される加速度データには、対応するセンサ装置12のBluetoothモジュール36のMACアドレスが付加されている。このため、コンピュータ18では、このMACアドレスを識別情報として各センサ装置12を識別するようにしてある。なお、簡単のため、図2(B)では、MACアドレスを4桁のアルファベットで示してある。ただし、各センサ装置12の識別情報を別途EEPROMに記憶しておくようにしてもよいし、DIPスイッチを設けておき、識別情報を任意に設定可能にするようにしてもよい。
【0030】
具体的には、図2(B)に示す例では、右手首に装着されているセンサ装置12の識別情報は「AAAA」であり、左手首に装着されているセンサ装置12の識別情報は「BBBB」であり、右足首に装着されているセンサ装置12の識別情報は「CCCC」であり、そして、左足首に装着されているセンサ装置12の識別情報は「DDDD」である。
【0031】
なお、センサ装置12の装着位置の識別(決定)方法については後述するため、ここではその説明は省略する。
【0032】
図3はセンサ装置12の電気的な構成を示すブロック図である。図3に示すように、センサ装置12はCPU30を含み、CPU30には加速度センサ32およびRAM34が接続される。加速度センサ32としては、汎用の多軸(この実施例では、3軸)加速度センサを用いることができる。たとえば、日立金属株式会社製の3軸加速度センサ(型式:H48C)を用いることができる。また、CPU30には、Bluetooth(登録商標)モジュール36が接続され、このBluetoothモジュール36にはアンテナ38が接続される。加速度センサ32で検出された加速度についてのデータ(加速度データ)が、CPU30の指示の下、RAM34に一時記憶され、一定時間(たとえば、10秒)毎に、一定時間分の加速度データがBluetoothモジュール36およびアンテナ38を介して中継器14に送信される。
【0033】
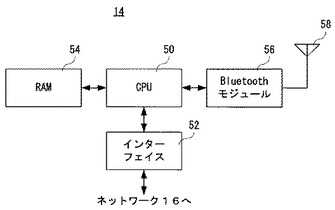
図4は中継器14の電気的な構成を示すブロック図である。図4に示すように、中継器14はCPU50を含み、CPU50には、インターフェイス52およびRAM54が接続される。インターフェイス52によって、中継器14はネットワーク16に接続される。また、CPU50には、Bluetoothモジュール56が接続され、このBluetoothモジュール56にはアンテナ58が接続される。したがって、近距離無線によって、上述したように、センサ装置12と中継器14とが通信可能に接続されるのである。中継器14では、CPU50は、アンテナ58およびBluetoothモジュール56を介してセンサ装置12からの加速データを受信し、この加速度データをRAM54に一時記憶して、その後、インターフェイス52およびネットワーク16を介してコンピュータ18に送信する。
【0034】
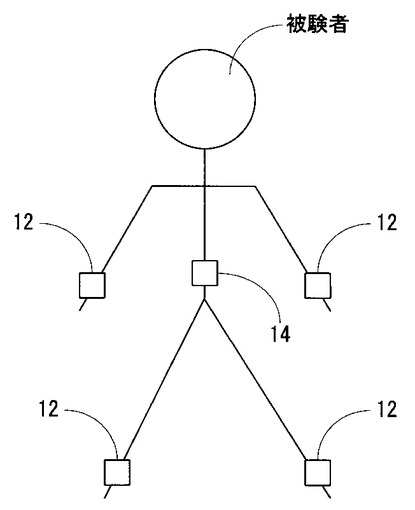
図5は複数のセンサ装置12および中継器14が被験者に装着された状態を模式的に示す。この実施例では、被験者の右手首、左手首、右足首および左足首のそれぞれにセンサ装置12が装着され、被験者の腰部(胴体)に中継器14が装着される。ただし、中継器14は腰部に装着する必要はなく、たとえば、被験者が使用するリュックサックやウエストポーチ等に入れておいてもよい。
【0035】
このような構成の動作計測システム10では、被験者が動作すると、それに伴って被験者に装着された各センサ装置12の加速度センサ32で加速度が検出される。各センサ装置12では、検出された加速度に対応する加速度データが、上述したように、コンピュータ18に送信される。コンピュータ18では、各センサ装置12に対応付けて加速度データをデータベース20に記憶する。これによって、被験者の動作に対応する動作データが計測されるのである。
【0036】
たとえば、図6(A)に示すように、右手首にセンサ装置12が正しく(正しい方向で)装着された場合には、加速度センサ32は、手の甲側に装着され、手の甲を上向きにして指を伸ばしたときに、指先の方向を前方とすると、被験者が前方を向いた状態で、X軸は左方向であり、Y軸は前方であり、Z軸は上方向である。この図6(A)に示す装着状態を基準の状態とする。また、図示は省略するが、左手首に装着されるセンサ装置12も同様である。
【0037】
なお、図6(A)−図6(C)では、分かり易くするために、センサ装置12のうちの加速度センサ32のみを示してある。また、図示は省略するが、センサ装置12は、リストバンドのような固定具によって被験者に装着される。
【0038】
図6(B)および図6(C)は、誤った方向で加速度センサ32(センサ装置12)を右手首に装着した状態を示す。図6(B)に示す状態は、図6(A)に示す基準の状態において、加速度センサ32を、Z軸を中心に右ネジとは逆向きに約90°回転した状態(90°回転)である。また、図6(C)に示す状態は、図6(A)に示す基準の状態において、加速度センサ32を、Z軸を中心に右ネジとは逆向きに約135°回転した後に、さらに図6(A)におけるY軸を中心に右ネジの方向に約90°回転した状態(複雑回転)である。ただし、図6(C)では、加速度センサ32の裏面(図6(A),(B)で手首に接する面)に斜線を付して示してある。
【0039】
図示は省略するが、足首に装着されるセンサ装置12の正しい向き(基準の状態)は、手首に装着されるセンサ装置12と同様である。簡単に説明すると、センサ装置12は、被験者が直立した状態で、足の甲側(脛側)に装着され、その脛が向く方向を前方としたときに、加速度センサ32のX軸が被験者から見て左方向であり、Y軸が下向きであり、Z軸が前方向である。
【0040】
ただし、各センサ装置12はいずれも同じものであり、どのセンサ装置12をどの部位に装着するかは被験者の自由であり、被験者毎に異なったり、同じ被験者であっても毎回異なったりする。したがって、被験者の動作を正確に検出するためには、どのセンサ装置12がどの部位に装着されているかを事前に知る必要がある。
【0041】
また、各センサ装置12が常に正しい向き(基準の状態)で装着されるとは限らない。つまり、図6(B)および図6(C)に示すように、誤った方向で加速度センサ32(センサ装置12)を装着した場合には、正しく加速度データを検出することができない。このため、被験者の動作を正確に検出することができない。
【0042】
そこで、この実施例では、被験者が所定の動作を行った場合に、対応する動作データ(各部位の加速度データ)を検出し、まず、複数のセンサ装置12のそれぞれの装着位置を決定し、その後、所定の動作についての基準データに対する、検出した動作データの3次元の回転量を補正するための補正値を算出する。このようにすれば、その後に、動作データを検出する場合には、補正値を用いて各センサ装置12からの加速度データを補正することにより、基準の状態でセンサ装置12を装着した場合と同等の動作データを得ることができる。
【0043】
簡単に説明すると、まず、この実施例では、所定の動作を行ったときの加速度に基づいて、4つのセンサ装置12のそれぞれの装着位置(右手首,左手首,右足首,左足首)を判別(決定)する。ここでは、センサ装置12の装着位置を容易に判断できるようにするため、所定の動作としては、上述したように、右手を上げ、左足を前に出し、左手を上げた後、右足を前に出すのような4つの動作が選択される。このとき、動作毎に(時系列に従って)、加速度の変化量(最大変化量)が所定の閾値以上になったセンサ装置12を検出して、当該センサ装置12を当該動作に対応する部位に装着されているものとして認識する。
【0044】
たとえば、右手を上げる動作のときに、加速度の最大変化量が閾値1を超えるセンサ装置12は右手首に装着されていると認識される。また、左足を前に出す動作のときに、加速度の最大変化量が閾値2を超えるセンサ装置12は左足首に装着されていると認識される。さらに、左手を上げる動作のときに、加速度の最大変化量が閾値3を超えるセンサ装置12は左手首に装着されていると認識される。そして、右足を前に出す動作のときに、加速度の最大変化量が閾値4を超えるセンサ装置12は右足首に装着されていると認識される。
【0045】
この認識結果がデータベース20に記録され、図2(B)に示したようなセンサ装置の識別テーブルが生成される。ただし、閾値を超えるセンサ装置12が存在しない場合には、コンピュータ18は被験者に対して音声や画面表示或いはその両方によって、センサ装置12が正しく装着されていない旨や動作が正しくない旨のエラーを発する。
【0046】
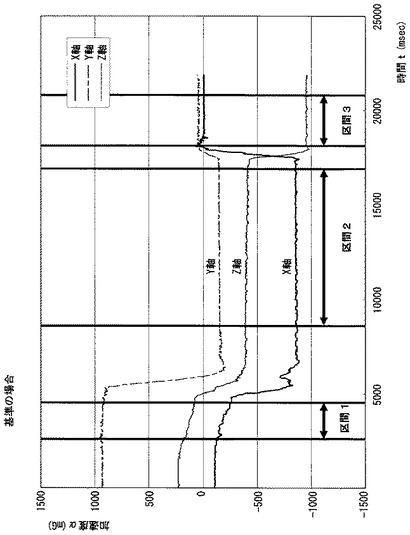
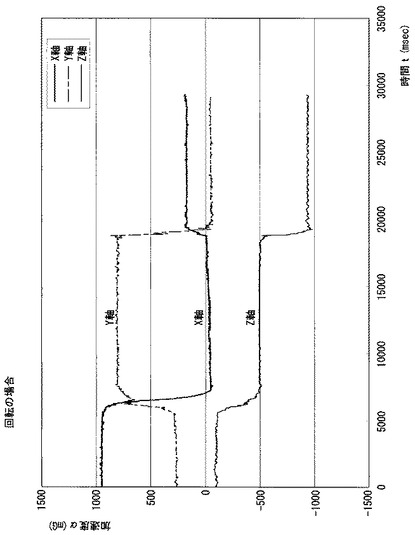
次に、加速度(加速度データ)を補正する場合について説明する。図7は、基準の場合において、(1)気をつけの姿勢(直立の姿勢)、(2)前に倣えの姿勢(両手を延ばした状態で肩の高さまで上げた姿勢)、(3)(2)の状態のままで掌が下に向くように手首を回転した姿勢を、順番に実行した場合の右手首に装着されたセンサ装置12に設けられる加速度センサ32の加速度の時系列変化を示す。ただし、区間1が(1)の姿勢の場合の加速度変化に対応し、区間2が(2)の姿勢の場合の加速度変化に対応し、区間3が(3)の姿勢の場合の加速度変化に対応する。
【0047】
図6(B)に示したように、右手首に装着された加速度センサ32(センサ装置12)を、基準の状態からZ軸を中心に、右ネジとは逆向きに約90°回転させた状態では、上記(1)から(3)の姿勢を連続的に行う動作に対応して、図8に示すように、その加速度は変化する。基準の状態における加速度センサ32のY軸の方向と、90°回転した状態における加速度センサ32のX軸の方向とが同じ向きであるため、図7と図8とを比較して分かるように、基準の状態におけるY軸方向の加速度の変化と、90°回転した状態におけるX軸方向の加速度の変化とがほぼ同じである。また、基準の状態と90°回転した状態とでは、加速度センサ32のZ軸の方向は変化しないため、各状態でZ軸方向の加速度はほぼ同じである。さらに、基準の状態における加速度センサ32のX軸の方向と、90°回転した状態における加速度センサ32のY軸の方向とが約180°異なるため、基準の状態におけるX軸方向の加速度の変化と、90°回転した状態におけるY軸方向の加速度の変化を上下に反転した波形とがほぼ同じである。
【0048】
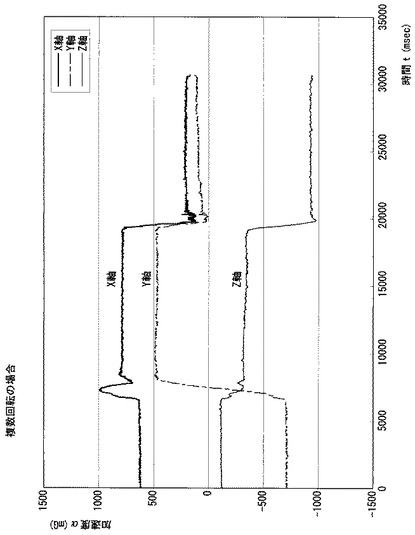
また、図6(C)に示したように、右手首に装着された加速度センサ32(センサ装置12)を、基準の状態からZ軸を中心に、右ネジとは逆向きに約135°回転させ、さらに、基準の状態におけるY軸を中心に、右ネジの方向に約90°回転させた状態では、上記(1)から(3)の姿勢に対応して、図9に示すように、その加速度は変化する。図7と図9とを比較して分かるように、基準の状態と複雑回転の状態とでは、各軸方向の加速度の変化は大きく異なっている。
【0049】
このように、加速度センサ32(センサ装置12)を装着する向きが正しくない場合には、当然のことながら、正しく加速度を検出することができない。そこで、上述したように、各部位に装着された加速度センサ32(センサ装置12)を識別した後に、その装着方向に応じた補正値(この実施例では、回転行列)を求める。以下、具体的に説明することにする。
【0050】
まず、被験者がセンサ装置12を装着した状態における(1)の姿勢、(2)の姿勢、(3)の姿勢についての3軸(X,Y,Z軸)の加速度の平均値をそれぞれ(x1,y1,z1),(x2,y2,z2),(x3,y3,z3)とし、これを3×3行列とみなすと、数1に示すように行列Xとする。
【0051】
[数1]

【0052】
また、基準の状態において予め計測しておいた、(1)の姿勢、(2)の姿勢、(3)の姿勢についての3軸の加速度の値をそれぞれ(x1/,y1/,z1/),(x2/,y2/,z2/),(x3/,y3/,z3/)とし、これを3×3行列の値を、数2に示すように、行列Aとする。ただし、「/」は、各文字の上側に記載される横棒(バー)を意味する。以下、同様である。
【0053】
[数2]
【0054】
ここで、上述したように、センサ装置12の装着方向ないし装着角度の違いによって、このセンサ装置12に設けられる加速度センサ32は基準の状態から回転された位置で装着されている。したがって、その回転を表わす行列をRとすると、基準となる位置・角度で装着したときに得られるはずの加速度の値(x/,y/,z/)には、数3の関係が成り立つ。また、このことから、数4が成立する。
【0055】
[数3]
【0056】
[数4]
X=R×A
この数3および数4から数5が成り立ち、さらに、数6が成り立ち、この数6に従って数7が得られる。
【0057】
[数5]
【0058】
[数6]
R−1=A×X−1
[数7]
【0059】
このように、予め求めていた基準の状態で所定の動作を行った場合における加速度の平均値の行列Aと、被験者が定められた姿勢を連続的に取った(所定の動作を行った)ときの加速度の行列Xとから、計測された加速度(x,y,z)を、基準とする位置・角度に装着したときに得られるはずの加速度(x/,y/,z/)に変換することができる。
【0060】
このような補正値(回転行列R)を各センサ装置12(加速度センサ32)について算出しておけば、その後、各加速度センサ32からの加速度(加速度データ)を補正することにより、正しい位置・角度で装着された場合と同様に、被験者の動作についての動作データを検出することができる。
【0061】
たとえば、図8に示した90°回転の場合についての補正値は数8で示され、図9に示した複雑回転の場合についての補正値は数9で示される。
【0062】
[数8]
【0063】
[数9]
【0064】
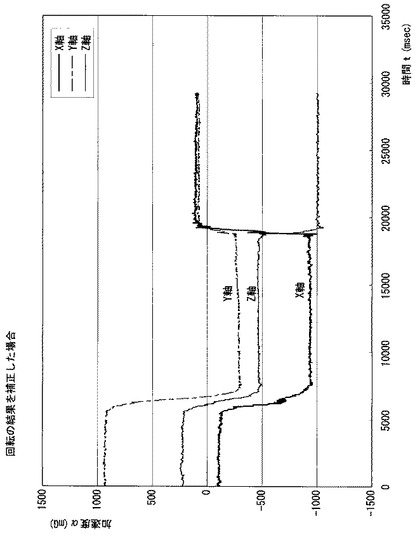
また、図8に示した90°回転の場合についての加速度の変化を、上述のようにして求めた補正値によって補正すると、図10に示すような加速度の変化が得られる。これは、図7に示した基準の場合の結果とほぼ同じである(近似している)ことが分かる。同様に、図9に示した複雑回転の場合についての加速度の変化を、上述のようにして求めた補正値によって補正すると、図11に示すような加速度の変化が得られる。かかる場合にも、図7に示した基準の場合の結果とほぼ同じであることが分かる。
【0065】
具体的には、図1に示したコンピュータ18のCPU(図示せず)が図12および図13に示す補正値の算出処理を実行する。ただし、図12および図13に示す補正値の算出処理では、所定の動作についての基準データがメモリに記憶されているものとする。
【0066】
図12に示すように、コンピュータ18は補正値の算出処理を開始すると、ステップS1で、変数iおよびjを初期化する(i=1,j=1)。続くステップS3では、所定の動作[i]を指示する。上述したように、この実施例では、所定の動作[i]は、右手を上げる[i=1]、左足を前に出す[i=2]、左手を上げる[i=3]、右足を前に出す[i=4]の4つの動作である。
【0067】
したがって、ステップS3では、コンピュータ18は、所定の動作[i]を被験者に指示するべく、対応する動作についての合成音声データをメモリ(図示せず)から読み出し、D/A変換および増幅の処理を施した後、コンピュータ18に設けられるスピーカ(図示せず)から出力する。ただし、センサ装置12にD/A変換器、増幅器およびスピーカを設けておき、コンピュータ18から所定の動作[i]を指示するための合成音声データをネットワーク16および中継器14を介して送信して、被験者が装着するセンサ装置12から所定の動作[i]の指示を音声出力するようにしてもよい。また、音声による指示に限定される必要はなく、コンピュータ18に接続されるディスプレイにテキスト表示することにより、動作を指示してもよい。かかる場合には、センサ装置12にディスプレイドライバ(インターフェイス)およびディスプレイを設けておき、コンピュータ18の指示に従ってそのディスプレイに所定の動作[i]の指示をテキスト表示するようにしてもよい。さらには、音声出力とテキスト表示との両方で所定の動作[i]を指示するようにしてもよい。
【0068】
次のステップS5では、全てのセンサ装置12からの加速度データを検出し、データベース20に記憶する。続いて、ステップS7では、閾値[i]を読み出す。ここで、閾値[i]は、所定の動作[i]に対応した値であり、実験により、基準の状態で所定の動作[i]を行ったときに経験的に得られた値である。続くステップS9では、加速度データ[j]をメモリから読み出す。ここでは、各センサ装置12からの加速度データを区別するために変数jを用いてある。
【0069】
そして、ステップS11では、加速度データ[j]の最大変化量(絶対値)が閾値[i]よりも大きいかどうかを判断する。ステップS11で“NO”であれば、つまり加速度データ[i]の最大変化量が閾値[i]以下であれば、ステップS13で、変数jを1加算し(j=j+1)、変数jが4よりも大きいかどうかを判断する。つまり、すべての加速度データ[j]について閾値[i]と比較したかどうかを判断する。ステップS15で“NO”であれば、つまり変数jが4以下であれば、そのままステップS9に戻って、次の加速度データ[j]について処理を実行する。一方、ステップS15で“YES”であれば、つまり変数jが4よりも大きければ、加速度データを正しく検出できていないと判断して、ステップS17で、エラーを被験者に発して、図13に示すように、補正値の算出処理を終了する。たとえば、ステップS17では、被験者に対して、正しくセンサ装置12が装着されていない旨および所定の動作が正しくない旨のメッセージが音声ないしテキスト表示或いはそれらの両方によって実行される。
【0070】
また、ステップS11で“YES”であれば、つまり加速度データ[j]の最大変化量が閾値[i]よりも大きければ、ステップS19で、加速度データ[j]に対応する加速度センサ32(センサ装置12)の装着位置を、所定の動作[i]に対応する部位に決定する。たとえば、この実施例では、所定の動作[1]は、右手を上げる動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を右手首に設定する。また、所定の動作[2]は、左足を前に出す動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を左足首に設定する。さらに、所定の動作[3]は、左手を上げる動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を左手首に設定する。そして、所定の動作[4]は、右足を前に出す動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を右足首に設定する。具体的には、コンピュータ18は、データベース20に、図2(B)に示したようなセンサ装置の識別テーブルを作成する。ただし、この識別テーブルは、コンピュータ18の内部メモリに作成するようにしてもよい。詳細な説明は省略するが、他のセンサ装置12についても同様である。
【0071】
続くステップS21では、変数iを1加算する(i=i+1)。そして、ステップS23では、変数iが4よりも大きいかどうかを判断する。つまり、すべてのセンサ装置12の装着位置を決定したかどうかを判断する。ステップS23で“NO”であれば、つまり変数iが4以下であれば、ステップS25で、変数jを初期化(リセット)して(j=j+1)、ステップS3に戻る。つまり、次の所定の動作[i]を被験者に指示する。一方、ステップS23で“YES”であれば、つまり変数iが4よりも大きければ、すべてのセンサ装置12の装着位置を決定したと判断して、図13に示すステップS27に進む。
【0072】
ステップS27では、右手首に装着されたセンサ装置12からの加速度データと、右手を上げる動作の基準データとから、上述したように、補正値1を算出し、当該センサ装置12に対応付けてメモリ(内部メモリまたはデータベース20)に記憶する。続く、ステップS29では、左手首に装着されたセンサ装置12からの加速度データと、左手を上げる動作の基準データとから、上述したように、補正値2を算出し、当該センサ装置12に対応付けてメモリに記憶する。次に、ステップS31では、右足首に装着されたセンサ装置12からの加速度データと、右足を前に出す動作の基準データとから、上述したように、補正値3を算出し、当該センサ装置12に対応付けてメモリに記憶する。そして、ステップS33では、左足首に装着されたセンサ装置12からの加速度データと、左足を前に出す動作の基準データとから、上述したように、補正値4を算出し、当該センサ装置12に対応付けてメモリに記憶して、補正値の算出処理を終了する。
【0073】
なお、この実施例では、4つのセンサ装置12を用いるため、図12および図13に示した補正値の算出処理では、変数iおよびjの最大値を4としてあるが、変数iおよびjの数値はセンサ装置12の数に従って適宜変更される。
【0074】
また、図示は省略するが、被験者が動作するに従ってセンサ装置12の向きが変化する可能性があるため、一定時間(たとえば、10分)毎に、補正値を算出し直す(更新する)ようにしてもよい。かかる場合には、図12および図13の補正値の算出処理において、ステップS9−S19の処理を削除した処理を実行すればよい。
【0075】
この実施例によれば、センサ装置を正しく装着したときに予め検出した基準データと、検出した動作データとに基づいて補正値を算出し、この補正値を用いて各センサ装置で検出される加速度データを補正するので、正しい装着状態と同等の動作データを検出することができる。つまり、センサ装置の装着状態に拘わらず、被験者の動作を正確に検出することができる。
【0076】
したがって、たとえば、センサ装置を正しく装着したときのあらゆる動作についての動作データ(基準動作データ)を動作毎に記憶しておけば、この基準動作データと、被験者の補正後の動作データ(補正動作データ)とをDPマッチング法やHMM(隠れマルコフモデル)法を用いて、基準動作データが示す動作を被験者の動作として特定(認識)することができる。
【0077】
なお、この実施例では、データ量を削減するために、センサ装置の装着位置を判別するための動作と、各センサ装置からの加速度データの補正値を算出するための動作とを同じにしてあるが、これらは異なる動作であってもよい。ただし、異なる動作にする場合には、全てのセンサ装置の装着位置を決定した後に、補正値を算出するための動作を被験者に実行させて、新たに加速度データを収集する必要がある。また、異なる動作についての基準データを用意しておく必要もある。
【図面の簡単な説明】
【0078】
【図1】図1はこの発明の動作計測システムの一例を示す図解図である。
【図2】図2は図1実施例に示すデータベースの内容を示す図解図である。
【図3】図3は図1実施例に示すセンサ装置の電気的な構成を示すブロック図である。
【図4】図4は図1実施例に示す中継器の電気的な構成を示すブロック図である。
【図5】図5は図1実施例に示すセンサ装置を被験者に装着する場合の装着箇所を模式的に示す図解図である。
【図6】図6は加速度センサを被験者の右手首に装着した状態の例を示す図解図である。
【図7】図7は右手首に正しい向きに加速度センサを装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図8】図8は右手首に加速度センサを90°回転して装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図9】図9は右手首に加速度センサを複雑回転して装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図10】図10は図8に示す加速度の時間変化を補正したグラフである。
【図11】図11は図9に示す加速度の時間変化を補正したグラフである。
【図12】図12は図1に示すコンピュータの補正値の算出処理の一部を示すフロー図である。
【図13】図13は図1に示すコンピュータの補正値の算出処理の他の一部であって、図12に後続するフロー図である。
【符号の説明】
【0079】
10 …動作計測システム
12 …センサ装置
14 …中継器
16 …ネットワーク
18 …コンピュータ
20 …データベース
30,50 …CPU
32 …加速センサ
36,56 …Bluetoothモジュール
【技術分野】
【0001】
この発明は動作計測装置に関し、特にたとえば、所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する、動作計測装置に関する。
【背景技術】
【0002】
従来のこの種の動作計測装置の一例が特許文献1に開示される。この特許文献1に開示される行動検知装置では、人体への装着面に2つのCCD素子が設けられる。この2つのCCD素子のそれぞれが検出したそれぞれの移動ベクトルを判定し、移動ベクトルが互いに逆の方向を示している場合には、行動検知装置がその中心点を中心に回転していることとなる。そして、行動検知装置が回転している場合には、回転方向の機器ずれを検知して加速度出力を補正する。
【特許文献1】特開2005−172625
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、背景技術では、行動検知装置を装着したときに、既に正しい装着状態から回転してしまっている場合には、その後に検出された回転方向の機器ずれに基づいて加速度出力を補正したとしても、行動検知装置を装着したときの装着状態での加速度を検出できるに留まり、正しい装着状態(姿勢)での加速度を検出することができない。また、この背景技術では、CCD素子が配置される2次元平面内での回転については補正可能であるが、そのような2次元平面と交差する方向の回転すなわち3次元的な回転があっても加速度を補正することができない。つまり、被験者の行動を正確に計測(検出)することができない。
【0004】
それゆえに、この発明の主たる目的は、新規な、動作計測装置を提供することである。
【0005】
この発明の他の目的は、正確に動作を計測できる、動作計測装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0007】
請求項1の発明は、所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する動作計測装置であって、所定の方向で加速度センサを被験者の所定の部位に装着し、当該被験者が所定の動作を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する基準データ記憶手段、所定の部位に加速度センサを装着した被験者が所定の動作を行うとき、当該加速度センサからの加速度データを検出する加速度データ検出手段、および加速度データ検出手段によって検出された加速度データと、基準データ記憶手段に記憶された基準データとに基づいて、加速度センサからの加速度データを補正するための補正値を算出する補正値算出手段を備える、動作計測装置である。
【0008】
請求項1の発明では、動作計測装置(18)は、所定の部位(たとえば、右手,左手,右足,左足)に加速度センサ(32)の装着された被験者の動作についての動作データを検出して動作データ記憶手段(20)に記憶する。基準データ記憶手段(20)は、所定の方向(基準となる方向)で加速度センサを被験者の所定の部位に装着し、当該被験者が所定の動作(たとえば、右手を上げる、左手を上げる、右足を前に出す、左足を前に出す)を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する。また、加速度データ検出手段(18,S5)は、所定の部位に加速度センサを装着した被験者が所定の動作を行うとき、当該加速度センサからの加速度データを検出する。補正値算出手段(18,S27,S29,S31,S33)は、加速度データ検出手段によって検出された加速度データと、基準データ記憶手段に記憶された基準データとに基づいて、加速度センサからの加速度データを補正するための補正値を算出する。
【0009】
請求項1の発明によれば、検出した加速度データと予め記憶してある基準データとに基づいて補正値を算出するので、この補正値を用いることにより、それ以降に検出される加速度データを補正すれば、所定の方向で加速度センサを装着した状態とほぼ同じ動作データを検出することができる。つまり、正確に動作を計測することができる。
【0010】
請求項2の発明は請求項1に従属し、基準データ記憶手段は、複数の加速度センサのそれぞれを所定の方向で被験者の複数の所定の部位にそれぞれ装着したときに、当該複数の加速度センサからの加速度データをそれぞれの基準データとして予め記憶し、複数の加速度センサを被験者の複数の所定の部位のそれぞれに装着したとき、加速度データ検出手段は複数の加速度センサからの加速度データをそれぞれ検出し、補正値算出手段は、複数の加速度センサからの加速度データのそれぞれと、当該加速度データと対応する基準データのそれぞれとに基づいて、それぞれの加速度データを補正するための補正値を当該複数の加速度センサのそれぞれについて算出する。
【0011】
請求項2の発明では、複数の加速度センサが、被験者の複数の部位(たとえば、両手首および両足首)に装着される。したがって、基準データも各部位について予め記憶される。補正値算出手段は、各部位に装着された加速度センサのそれぞれについての補正値を算出する。
【0012】
請求項2の発明においても、請求項1の発明と同様に、正確に動作を計測することができる。
【0013】
請求項3の発明は請求項2に従属し、加速度センサが装着されるべき部位のそれぞれに対応して所定の閾値を記憶する閾値記憶手段、閾値記憶手段に記憶された所定の閾値と、加速度データ検出手段によって検出された加速度データの最大変化量とを比較する比較手段、および比較手段の結果、最大変化量が所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する部位決定手段をさらに備える。
【0014】
請求項3の発明では、閾値記憶手段(20)、比較手段(18,S11)および部位決定手段(18,S19)がさらに設けられる。閾値記憶手段は、加速度センサが装着されるべき部位のそれぞれに対応して所定の閾値を記憶する。比較手段は、閾値記憶手段に記憶された所定の閾値と、加速度データ検出手段によって検出された加速度データの最大変化量とを比較する。部位決定手段は、最大変化量が所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する。つまり、被験者に所定の動作を行わせることにより、動きの大きい部位と、出力の変化が大きい加速度センサとを対応付けるのである。
【0015】
請求項3の発明によれば、加速度センサとその装着位置とを対応付けるので、全て同じ加速度センサを用意すれば足り、特定の加速度センサを特定の部位に装着するなどの対応づけを特にする必要がない。つまり、被験者が加速度センサを装着する場合の煩わしさを軽減することができる。
【0016】
請求項4の発明は請求項1ないし3のいずれかに従属し、補正値算出手段は、加速度センサを所定の方向で被験者に装着した状態からの回転角度に関する補正値を算出する。
【0017】
請求項4の発明では、補正値算出手段は、加速度センサを所定の方向で被験者に装着した状態からの回転角度(ずれ)を補正する補正値を算出する。たとえば、回転角度は、3次元の回転についての角度である。
【0018】
請求項4の発明によれば、装着された加速度センサの回転角度を補正するので、装着方向に拘わらず、正しい装着状態と同等の動作データを計測することができる。
【発明の効果】
【0019】
この発明によれば、検出した加速度データと予め記憶してある基準データとに基づいて補正値を算出するので、この補正値を用いることにより、それ以降に検出される加速度データを補正すれば、正しい方向で加速度センサを装着した状態とほぼ同じ動作データを検出することができる。つまり、正確に動作を計測することができる。
【0020】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【発明を実施するための最良の形態】
【0021】
図1を参照して、この実施例の動作計測システム10は、複数のセンサ装置12を含み、各センサ装置12は被験者の所定の部位に装着される(図5参照)。この実施例では、被験者の様々な動作を計測するようにするため、複数のセンサ装置12を被験者に装着するようにしてあるが、歩行動作だけを計測するように、単純な動作のみを検出する場合には、センサ装置12を1つ装着するようにしてもよい。
【0022】
また、動作計測システム10は、中継器14を含み、上述したセンサ装置12と中継器14とが無線通信可能に接続される。この実施例では、センサ装置12および中継器14を被験者に装着するため、被験者の動作の邪魔にならないように、センサ装置12と中継器14との間で無線により通信するようにしてあるが、有線接続されてもよいことは勿論である。図示は省略するが、この実施例では、中継器14もまた、被験者の動作の邪魔にならないように、無線により、アクセスポイントを介してネットワーク16に接続される。ただし、中継器14は、ネットワーク16に有線接続されるようにしてもよい。図示は省略するが、被験者が様々な場所に存在(移動)する場合には、各場所や移動経路に、それぞれアクセスポイントが設けられる。
【0023】
さらに、動作計測システム10は、ネットワーク16を含み、センサ装置12は、中継器14およびネットワーク16を介して、コンピュータ18に通信可能に接続される。コンピュータ18は、PC或いはPDAのような汎用のコンピュータであり、この実施例では、コンピュータ18は動作計測装置として機能する。また、コンピュータ18には、データベース20が接続される。ただし、センサ装置12は、コンピュータ18が無線通信機能を備える場合には、当該コンピュータ18との間で直接通信することも可能である。
【0024】
なお、この実施例では、データベース20は、コンピュータ18に直接接続するように示してあるが、ネットワーク16を介して通信可能に接続するようにしてもよい。また、図示は省略するが、コンピュータ18の内部メモリ(ハードディスク,ROM,RAM)をデータベース20として用いるようにしてもよい。
【0025】
図2(A)および(B)に示すように、データベース20には、基準データのテーブルおよびセンサ装着の識別テーブルについてのデータが記憶される。ただし、センサ装置の識別テーブルは、被験者の動作の計測を開始するとき作成される。
【0026】
図2(A)に示す基準データのテーブルは、後述するように、正しい向き(基準の状態)でセンサ装置12を被験者に装着し、当該被験者が所定の動作を行った場合に、各センサ装置12から出力される加速度データが基準データとして各動作に対応づけて記憶されている。ここで、図2(A)からも分かるように、所定の動作は、「右手を上げる」、「左手を上げる」、「右足を前に出す」および「左足を前に出す」の4種類である。また、基準データは、厳密に言うと、各センサ装置12の加速度データが示す加速度を軸(X軸,Y軸,Z軸)毎に平均した平均値のデータである。したがって、平均値は、センサ装置12毎に算出され、全センサ装置12についての平均値ではない。
【0027】
また、基準データは、センサ装置12が装着される部位毎に記述される。したがって、基準データは、対応する部位に装着されたセンサ装置12で検出される加速度の平均値についてのデータである。具体的には、「右手を上げる」に対応して、右手首に正しく装着されたセンサ装置12の加速度の平均値(XA,YA,ZA)のデータが記憶される。また、「左手を上げる」に対応して、左手首に正しく装着されたセンサ装置12の加速度の平均値(XB,YB,ZB)のデータが記憶される。さらに、「右足を前に出す」に対応して、右足首に正しく装着されたセンサ装置12の加速度の平均値(XC,YC,ZC)のデータが記憶される。さらにまた、「左足を前に出す」に対応して、左足首に正しく装着されたセンサ装置12の加速度の平均値(XD,YD,ZD)のデータが記憶される。
【0028】
さらに、所定の動作のそれぞれに対応して、それぞれのセンサ装置12が装着された部位を識別(決定)するための閾値が記憶される。図2(A)に示す例では、「右手首」に対応して閾値1が記憶され、「左手首」に対応して閾値3が記憶され、「右足首」に対応して閾値4が記憶され、そして、「左足首」に対応して閾値2が記憶される。ただし、閾値1−4は実験により経験的に得られた数値である。したがって、閾値1−4は、使用する加速度センサの種類や被験者等によって適宜変更されるべきである。
【0029】
また、データベース20には、センサ装置の識別テーブルのデータが記憶される。このセンサ装置の識別テーブルでは、被験者の部位に対応して、当該部位に装着されたセンサ装置12の識別情報が記憶される。たとえば、各センサ装置12から送信される加速度データには、対応するセンサ装置12のBluetoothモジュール36のMACアドレスが付加されている。このため、コンピュータ18では、このMACアドレスを識別情報として各センサ装置12を識別するようにしてある。なお、簡単のため、図2(B)では、MACアドレスを4桁のアルファベットで示してある。ただし、各センサ装置12の識別情報を別途EEPROMに記憶しておくようにしてもよいし、DIPスイッチを設けておき、識別情報を任意に設定可能にするようにしてもよい。
【0030】
具体的には、図2(B)に示す例では、右手首に装着されているセンサ装置12の識別情報は「AAAA」であり、左手首に装着されているセンサ装置12の識別情報は「BBBB」であり、右足首に装着されているセンサ装置12の識別情報は「CCCC」であり、そして、左足首に装着されているセンサ装置12の識別情報は「DDDD」である。
【0031】
なお、センサ装置12の装着位置の識別(決定)方法については後述するため、ここではその説明は省略する。
【0032】
図3はセンサ装置12の電気的な構成を示すブロック図である。図3に示すように、センサ装置12はCPU30を含み、CPU30には加速度センサ32およびRAM34が接続される。加速度センサ32としては、汎用の多軸(この実施例では、3軸)加速度センサを用いることができる。たとえば、日立金属株式会社製の3軸加速度センサ(型式:H48C)を用いることができる。また、CPU30には、Bluetooth(登録商標)モジュール36が接続され、このBluetoothモジュール36にはアンテナ38が接続される。加速度センサ32で検出された加速度についてのデータ(加速度データ)が、CPU30の指示の下、RAM34に一時記憶され、一定時間(たとえば、10秒)毎に、一定時間分の加速度データがBluetoothモジュール36およびアンテナ38を介して中継器14に送信される。
【0033】
図4は中継器14の電気的な構成を示すブロック図である。図4に示すように、中継器14はCPU50を含み、CPU50には、インターフェイス52およびRAM54が接続される。インターフェイス52によって、中継器14はネットワーク16に接続される。また、CPU50には、Bluetoothモジュール56が接続され、このBluetoothモジュール56にはアンテナ58が接続される。したがって、近距離無線によって、上述したように、センサ装置12と中継器14とが通信可能に接続されるのである。中継器14では、CPU50は、アンテナ58およびBluetoothモジュール56を介してセンサ装置12からの加速データを受信し、この加速度データをRAM54に一時記憶して、その後、インターフェイス52およびネットワーク16を介してコンピュータ18に送信する。
【0034】
図5は複数のセンサ装置12および中継器14が被験者に装着された状態を模式的に示す。この実施例では、被験者の右手首、左手首、右足首および左足首のそれぞれにセンサ装置12が装着され、被験者の腰部(胴体)に中継器14が装着される。ただし、中継器14は腰部に装着する必要はなく、たとえば、被験者が使用するリュックサックやウエストポーチ等に入れておいてもよい。
【0035】
このような構成の動作計測システム10では、被験者が動作すると、それに伴って被験者に装着された各センサ装置12の加速度センサ32で加速度が検出される。各センサ装置12では、検出された加速度に対応する加速度データが、上述したように、コンピュータ18に送信される。コンピュータ18では、各センサ装置12に対応付けて加速度データをデータベース20に記憶する。これによって、被験者の動作に対応する動作データが計測されるのである。
【0036】
たとえば、図6(A)に示すように、右手首にセンサ装置12が正しく(正しい方向で)装着された場合には、加速度センサ32は、手の甲側に装着され、手の甲を上向きにして指を伸ばしたときに、指先の方向を前方とすると、被験者が前方を向いた状態で、X軸は左方向であり、Y軸は前方であり、Z軸は上方向である。この図6(A)に示す装着状態を基準の状態とする。また、図示は省略するが、左手首に装着されるセンサ装置12も同様である。
【0037】
なお、図6(A)−図6(C)では、分かり易くするために、センサ装置12のうちの加速度センサ32のみを示してある。また、図示は省略するが、センサ装置12は、リストバンドのような固定具によって被験者に装着される。
【0038】
図6(B)および図6(C)は、誤った方向で加速度センサ32(センサ装置12)を右手首に装着した状態を示す。図6(B)に示す状態は、図6(A)に示す基準の状態において、加速度センサ32を、Z軸を中心に右ネジとは逆向きに約90°回転した状態(90°回転)である。また、図6(C)に示す状態は、図6(A)に示す基準の状態において、加速度センサ32を、Z軸を中心に右ネジとは逆向きに約135°回転した後に、さらに図6(A)におけるY軸を中心に右ネジの方向に約90°回転した状態(複雑回転)である。ただし、図6(C)では、加速度センサ32の裏面(図6(A),(B)で手首に接する面)に斜線を付して示してある。
【0039】
図示は省略するが、足首に装着されるセンサ装置12の正しい向き(基準の状態)は、手首に装着されるセンサ装置12と同様である。簡単に説明すると、センサ装置12は、被験者が直立した状態で、足の甲側(脛側)に装着され、その脛が向く方向を前方としたときに、加速度センサ32のX軸が被験者から見て左方向であり、Y軸が下向きであり、Z軸が前方向である。
【0040】
ただし、各センサ装置12はいずれも同じものであり、どのセンサ装置12をどの部位に装着するかは被験者の自由であり、被験者毎に異なったり、同じ被験者であっても毎回異なったりする。したがって、被験者の動作を正確に検出するためには、どのセンサ装置12がどの部位に装着されているかを事前に知る必要がある。
【0041】
また、各センサ装置12が常に正しい向き(基準の状態)で装着されるとは限らない。つまり、図6(B)および図6(C)に示すように、誤った方向で加速度センサ32(センサ装置12)を装着した場合には、正しく加速度データを検出することができない。このため、被験者の動作を正確に検出することができない。
【0042】
そこで、この実施例では、被験者が所定の動作を行った場合に、対応する動作データ(各部位の加速度データ)を検出し、まず、複数のセンサ装置12のそれぞれの装着位置を決定し、その後、所定の動作についての基準データに対する、検出した動作データの3次元の回転量を補正するための補正値を算出する。このようにすれば、その後に、動作データを検出する場合には、補正値を用いて各センサ装置12からの加速度データを補正することにより、基準の状態でセンサ装置12を装着した場合と同等の動作データを得ることができる。
【0043】
簡単に説明すると、まず、この実施例では、所定の動作を行ったときの加速度に基づいて、4つのセンサ装置12のそれぞれの装着位置(右手首,左手首,右足首,左足首)を判別(決定)する。ここでは、センサ装置12の装着位置を容易に判断できるようにするため、所定の動作としては、上述したように、右手を上げ、左足を前に出し、左手を上げた後、右足を前に出すのような4つの動作が選択される。このとき、動作毎に(時系列に従って)、加速度の変化量(最大変化量)が所定の閾値以上になったセンサ装置12を検出して、当該センサ装置12を当該動作に対応する部位に装着されているものとして認識する。
【0044】
たとえば、右手を上げる動作のときに、加速度の最大変化量が閾値1を超えるセンサ装置12は右手首に装着されていると認識される。また、左足を前に出す動作のときに、加速度の最大変化量が閾値2を超えるセンサ装置12は左足首に装着されていると認識される。さらに、左手を上げる動作のときに、加速度の最大変化量が閾値3を超えるセンサ装置12は左手首に装着されていると認識される。そして、右足を前に出す動作のときに、加速度の最大変化量が閾値4を超えるセンサ装置12は右足首に装着されていると認識される。
【0045】
この認識結果がデータベース20に記録され、図2(B)に示したようなセンサ装置の識別テーブルが生成される。ただし、閾値を超えるセンサ装置12が存在しない場合には、コンピュータ18は被験者に対して音声や画面表示或いはその両方によって、センサ装置12が正しく装着されていない旨や動作が正しくない旨のエラーを発する。
【0046】
次に、加速度(加速度データ)を補正する場合について説明する。図7は、基準の場合において、(1)気をつけの姿勢(直立の姿勢)、(2)前に倣えの姿勢(両手を延ばした状態で肩の高さまで上げた姿勢)、(3)(2)の状態のままで掌が下に向くように手首を回転した姿勢を、順番に実行した場合の右手首に装着されたセンサ装置12に設けられる加速度センサ32の加速度の時系列変化を示す。ただし、区間1が(1)の姿勢の場合の加速度変化に対応し、区間2が(2)の姿勢の場合の加速度変化に対応し、区間3が(3)の姿勢の場合の加速度変化に対応する。
【0047】
図6(B)に示したように、右手首に装着された加速度センサ32(センサ装置12)を、基準の状態からZ軸を中心に、右ネジとは逆向きに約90°回転させた状態では、上記(1)から(3)の姿勢を連続的に行う動作に対応して、図8に示すように、その加速度は変化する。基準の状態における加速度センサ32のY軸の方向と、90°回転した状態における加速度センサ32のX軸の方向とが同じ向きであるため、図7と図8とを比較して分かるように、基準の状態におけるY軸方向の加速度の変化と、90°回転した状態におけるX軸方向の加速度の変化とがほぼ同じである。また、基準の状態と90°回転した状態とでは、加速度センサ32のZ軸の方向は変化しないため、各状態でZ軸方向の加速度はほぼ同じである。さらに、基準の状態における加速度センサ32のX軸の方向と、90°回転した状態における加速度センサ32のY軸の方向とが約180°異なるため、基準の状態におけるX軸方向の加速度の変化と、90°回転した状態におけるY軸方向の加速度の変化を上下に反転した波形とがほぼ同じである。
【0048】
また、図6(C)に示したように、右手首に装着された加速度センサ32(センサ装置12)を、基準の状態からZ軸を中心に、右ネジとは逆向きに約135°回転させ、さらに、基準の状態におけるY軸を中心に、右ネジの方向に約90°回転させた状態では、上記(1)から(3)の姿勢に対応して、図9に示すように、その加速度は変化する。図7と図9とを比較して分かるように、基準の状態と複雑回転の状態とでは、各軸方向の加速度の変化は大きく異なっている。
【0049】
このように、加速度センサ32(センサ装置12)を装着する向きが正しくない場合には、当然のことながら、正しく加速度を検出することができない。そこで、上述したように、各部位に装着された加速度センサ32(センサ装置12)を識別した後に、その装着方向に応じた補正値(この実施例では、回転行列)を求める。以下、具体的に説明することにする。
【0050】
まず、被験者がセンサ装置12を装着した状態における(1)の姿勢、(2)の姿勢、(3)の姿勢についての3軸(X,Y,Z軸)の加速度の平均値をそれぞれ(x1,y1,z1),(x2,y2,z2),(x3,y3,z3)とし、これを3×3行列とみなすと、数1に示すように行列Xとする。
【0051】
[数1]
【0052】
また、基準の状態において予め計測しておいた、(1)の姿勢、(2)の姿勢、(3)の姿勢についての3軸の加速度の値をそれぞれ(x1/,y1/,z1/),(x2/,y2/,z2/),(x3/,y3/,z3/)とし、これを3×3行列の値を、数2に示すように、行列Aとする。ただし、「/」は、各文字の上側に記載される横棒(バー)を意味する。以下、同様である。
【0053】
[数2]
【0054】
ここで、上述したように、センサ装置12の装着方向ないし装着角度の違いによって、このセンサ装置12に設けられる加速度センサ32は基準の状態から回転された位置で装着されている。したがって、その回転を表わす行列をRとすると、基準となる位置・角度で装着したときに得られるはずの加速度の値(x/,y/,z/)には、数3の関係が成り立つ。また、このことから、数4が成立する。
【0055】
[数3]
【0056】
[数4]
X=R×A
この数3および数4から数5が成り立ち、さらに、数6が成り立ち、この数6に従って数7が得られる。
【0057】
[数5]
【0058】
[数6]
R−1=A×X−1
[数7]
【0059】
このように、予め求めていた基準の状態で所定の動作を行った場合における加速度の平均値の行列Aと、被験者が定められた姿勢を連続的に取った(所定の動作を行った)ときの加速度の行列Xとから、計測された加速度(x,y,z)を、基準とする位置・角度に装着したときに得られるはずの加速度(x/,y/,z/)に変換することができる。
【0060】
このような補正値(回転行列R)を各センサ装置12(加速度センサ32)について算出しておけば、その後、各加速度センサ32からの加速度(加速度データ)を補正することにより、正しい位置・角度で装着された場合と同様に、被験者の動作についての動作データを検出することができる。
【0061】
たとえば、図8に示した90°回転の場合についての補正値は数8で示され、図9に示した複雑回転の場合についての補正値は数9で示される。
【0062】
[数8]
【0063】
[数9]
【0064】
また、図8に示した90°回転の場合についての加速度の変化を、上述のようにして求めた補正値によって補正すると、図10に示すような加速度の変化が得られる。これは、図7に示した基準の場合の結果とほぼ同じである(近似している)ことが分かる。同様に、図9に示した複雑回転の場合についての加速度の変化を、上述のようにして求めた補正値によって補正すると、図11に示すような加速度の変化が得られる。かかる場合にも、図7に示した基準の場合の結果とほぼ同じであることが分かる。
【0065】
具体的には、図1に示したコンピュータ18のCPU(図示せず)が図12および図13に示す補正値の算出処理を実行する。ただし、図12および図13に示す補正値の算出処理では、所定の動作についての基準データがメモリに記憶されているものとする。
【0066】
図12に示すように、コンピュータ18は補正値の算出処理を開始すると、ステップS1で、変数iおよびjを初期化する(i=1,j=1)。続くステップS3では、所定の動作[i]を指示する。上述したように、この実施例では、所定の動作[i]は、右手を上げる[i=1]、左足を前に出す[i=2]、左手を上げる[i=3]、右足を前に出す[i=4]の4つの動作である。
【0067】
したがって、ステップS3では、コンピュータ18は、所定の動作[i]を被験者に指示するべく、対応する動作についての合成音声データをメモリ(図示せず)から読み出し、D/A変換および増幅の処理を施した後、コンピュータ18に設けられるスピーカ(図示せず)から出力する。ただし、センサ装置12にD/A変換器、増幅器およびスピーカを設けておき、コンピュータ18から所定の動作[i]を指示するための合成音声データをネットワーク16および中継器14を介して送信して、被験者が装着するセンサ装置12から所定の動作[i]の指示を音声出力するようにしてもよい。また、音声による指示に限定される必要はなく、コンピュータ18に接続されるディスプレイにテキスト表示することにより、動作を指示してもよい。かかる場合には、センサ装置12にディスプレイドライバ(インターフェイス)およびディスプレイを設けておき、コンピュータ18の指示に従ってそのディスプレイに所定の動作[i]の指示をテキスト表示するようにしてもよい。さらには、音声出力とテキスト表示との両方で所定の動作[i]を指示するようにしてもよい。
【0068】
次のステップS5では、全てのセンサ装置12からの加速度データを検出し、データベース20に記憶する。続いて、ステップS7では、閾値[i]を読み出す。ここで、閾値[i]は、所定の動作[i]に対応した値であり、実験により、基準の状態で所定の動作[i]を行ったときに経験的に得られた値である。続くステップS9では、加速度データ[j]をメモリから読み出す。ここでは、各センサ装置12からの加速度データを区別するために変数jを用いてある。
【0069】
そして、ステップS11では、加速度データ[j]の最大変化量(絶対値)が閾値[i]よりも大きいかどうかを判断する。ステップS11で“NO”であれば、つまり加速度データ[i]の最大変化量が閾値[i]以下であれば、ステップS13で、変数jを1加算し(j=j+1)、変数jが4よりも大きいかどうかを判断する。つまり、すべての加速度データ[j]について閾値[i]と比較したかどうかを判断する。ステップS15で“NO”であれば、つまり変数jが4以下であれば、そのままステップS9に戻って、次の加速度データ[j]について処理を実行する。一方、ステップS15で“YES”であれば、つまり変数jが4よりも大きければ、加速度データを正しく検出できていないと判断して、ステップS17で、エラーを被験者に発して、図13に示すように、補正値の算出処理を終了する。たとえば、ステップS17では、被験者に対して、正しくセンサ装置12が装着されていない旨および所定の動作が正しくない旨のメッセージが音声ないしテキスト表示或いはそれらの両方によって実行される。
【0070】
また、ステップS11で“YES”であれば、つまり加速度データ[j]の最大変化量が閾値[i]よりも大きければ、ステップS19で、加速度データ[j]に対応する加速度センサ32(センサ装置12)の装着位置を、所定の動作[i]に対応する部位に決定する。たとえば、この実施例では、所定の動作[1]は、右手を上げる動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を右手首に設定する。また、所定の動作[2]は、左足を前に出す動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を左足首に設定する。さらに、所定の動作[3]は、左手を上げる動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を左手首に設定する。そして、所定の動作[4]は、右足を前に出す動作であるため、かかる場合には、ステップS19では、当該センサ装置12の装着位置を右足首に設定する。具体的には、コンピュータ18は、データベース20に、図2(B)に示したようなセンサ装置の識別テーブルを作成する。ただし、この識別テーブルは、コンピュータ18の内部メモリに作成するようにしてもよい。詳細な説明は省略するが、他のセンサ装置12についても同様である。
【0071】
続くステップS21では、変数iを1加算する(i=i+1)。そして、ステップS23では、変数iが4よりも大きいかどうかを判断する。つまり、すべてのセンサ装置12の装着位置を決定したかどうかを判断する。ステップS23で“NO”であれば、つまり変数iが4以下であれば、ステップS25で、変数jを初期化(リセット)して(j=j+1)、ステップS3に戻る。つまり、次の所定の動作[i]を被験者に指示する。一方、ステップS23で“YES”であれば、つまり変数iが4よりも大きければ、すべてのセンサ装置12の装着位置を決定したと判断して、図13に示すステップS27に進む。
【0072】
ステップS27では、右手首に装着されたセンサ装置12からの加速度データと、右手を上げる動作の基準データとから、上述したように、補正値1を算出し、当該センサ装置12に対応付けてメモリ(内部メモリまたはデータベース20)に記憶する。続く、ステップS29では、左手首に装着されたセンサ装置12からの加速度データと、左手を上げる動作の基準データとから、上述したように、補正値2を算出し、当該センサ装置12に対応付けてメモリに記憶する。次に、ステップS31では、右足首に装着されたセンサ装置12からの加速度データと、右足を前に出す動作の基準データとから、上述したように、補正値3を算出し、当該センサ装置12に対応付けてメモリに記憶する。そして、ステップS33では、左足首に装着されたセンサ装置12からの加速度データと、左足を前に出す動作の基準データとから、上述したように、補正値4を算出し、当該センサ装置12に対応付けてメモリに記憶して、補正値の算出処理を終了する。
【0073】
なお、この実施例では、4つのセンサ装置12を用いるため、図12および図13に示した補正値の算出処理では、変数iおよびjの最大値を4としてあるが、変数iおよびjの数値はセンサ装置12の数に従って適宜変更される。
【0074】
また、図示は省略するが、被験者が動作するに従ってセンサ装置12の向きが変化する可能性があるため、一定時間(たとえば、10分)毎に、補正値を算出し直す(更新する)ようにしてもよい。かかる場合には、図12および図13の補正値の算出処理において、ステップS9−S19の処理を削除した処理を実行すればよい。
【0075】
この実施例によれば、センサ装置を正しく装着したときに予め検出した基準データと、検出した動作データとに基づいて補正値を算出し、この補正値を用いて各センサ装置で検出される加速度データを補正するので、正しい装着状態と同等の動作データを検出することができる。つまり、センサ装置の装着状態に拘わらず、被験者の動作を正確に検出することができる。
【0076】
したがって、たとえば、センサ装置を正しく装着したときのあらゆる動作についての動作データ(基準動作データ)を動作毎に記憶しておけば、この基準動作データと、被験者の補正後の動作データ(補正動作データ)とをDPマッチング法やHMM(隠れマルコフモデル)法を用いて、基準動作データが示す動作を被験者の動作として特定(認識)することができる。
【0077】
なお、この実施例では、データ量を削減するために、センサ装置の装着位置を判別するための動作と、各センサ装置からの加速度データの補正値を算出するための動作とを同じにしてあるが、これらは異なる動作であってもよい。ただし、異なる動作にする場合には、全てのセンサ装置の装着位置を決定した後に、補正値を算出するための動作を被験者に実行させて、新たに加速度データを収集する必要がある。また、異なる動作についての基準データを用意しておく必要もある。
【図面の簡単な説明】
【0078】
【図1】図1はこの発明の動作計測システムの一例を示す図解図である。
【図2】図2は図1実施例に示すデータベースの内容を示す図解図である。
【図3】図3は図1実施例に示すセンサ装置の電気的な構成を示すブロック図である。
【図4】図4は図1実施例に示す中継器の電気的な構成を示すブロック図である。
【図5】図5は図1実施例に示すセンサ装置を被験者に装着する場合の装着箇所を模式的に示す図解図である。
【図6】図6は加速度センサを被験者の右手首に装着した状態の例を示す図解図である。
【図7】図7は右手首に正しい向きに加速度センサを装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図8】図8は右手首に加速度センサを90°回転して装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図9】図9は右手首に加速度センサを複雑回転して装着した場合に、所定の動作を行ったときの加速度の時間変化を示すグラフである。
【図10】図10は図8に示す加速度の時間変化を補正したグラフである。
【図11】図11は図9に示す加速度の時間変化を補正したグラフである。
【図12】図12は図1に示すコンピュータの補正値の算出処理の一部を示すフロー図である。
【図13】図13は図1に示すコンピュータの補正値の算出処理の他の一部であって、図12に後続するフロー図である。
【符号の説明】
【0079】
10 …動作計測システム
12 …センサ装置
14 …中継器
16 …ネットワーク
18 …コンピュータ
20 …データベース
30,50 …CPU
32 …加速センサ
36,56 …Bluetoothモジュール
【特許請求の範囲】
【請求項1】
所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する動作計測装置であって、
所定の方向で前記加速度センサを前記被験者の所定の部位に装着し、当該被験者が所定の動作を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する基準データ記憶手段、
前記所定の部位に前記加速度センサを装着した前記被験者が前記所定の動作を行うとき、当該加速度センサからの加速度データを検出する加速度データ検出手段、および
前記加速度データ検出手段によって検出された加速度データと、前記基準データ記憶手段に記憶された基準データとに基づいて、前記加速度センサからの加速度データを補正するための補正値を算出する補正値算出手段を備える、動作計測装置。
【請求項2】
前記基準データ記憶手段は、複数の加速度センサのそれぞれを所定の方向で前記被験者の前記複数の所定の部位にそれぞれ装着したときに、当該複数の加速度センサからの加速度データをそれぞれの基準データとして予め記憶し、
前記複数の加速度センサを前記被験者の前記複数の所定の部位のそれぞれに装着したとき、前記加速度データ検出手段は前記複数の加速度センサからの加速度データをそれぞれ検出し、
前記補正値算出手段は、前記複数の加速度センサからの加速度データのそれぞれと、当該加速度データと対応する基準データのそれぞれとに基づいて、それぞれの加速度データを補正するための補正値を当該複数の加速度センサのそれぞれについて算出する、請求項1記載の動作計測装置。
【請求項3】
それぞれの前記加速度センサが装着されるべき部位それぞれに対応して所定の閾値を記憶する閾値記憶手段、
前記閾値記憶手段に記憶された所定の閾値と、前記加速度データ検出手段によって検出された加速度データの最大変化量とを比較する比較手段、および
前記比較手段の結果、前記最大変化量が前記所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する部位決定手段をさらに備える、請求項2記載の動作計測装置。
【請求項4】
前記補正値算出手段は、前記加速度センサを前記所定の方向で前記被験者に装着した状態からの回転角度を補正する補正値を算出する、請求項1ないし3のいずれかに記載の動作計測装置。
【請求項1】
所定の部位に加速度センサの装着された被験者の動作についての動作データを検出して動作データ記憶手段に記憶する動作計測装置であって、
所定の方向で前記加速度センサを前記被験者の所定の部位に装着し、当該被験者が所定の動作を行うときに当該加速度センサからの加速度データを取得して基準データとして予め記憶する基準データ記憶手段、
前記所定の部位に前記加速度センサを装着した前記被験者が前記所定の動作を行うとき、当該加速度センサからの加速度データを検出する加速度データ検出手段、および
前記加速度データ検出手段によって検出された加速度データと、前記基準データ記憶手段に記憶された基準データとに基づいて、前記加速度センサからの加速度データを補正するための補正値を算出する補正値算出手段を備える、動作計測装置。
【請求項2】
前記基準データ記憶手段は、複数の加速度センサのそれぞれを所定の方向で前記被験者の前記複数の所定の部位にそれぞれ装着したときに、当該複数の加速度センサからの加速度データをそれぞれの基準データとして予め記憶し、
前記複数の加速度センサを前記被験者の前記複数の所定の部位のそれぞれに装着したとき、前記加速度データ検出手段は前記複数の加速度センサからの加速度データをそれぞれ検出し、
前記補正値算出手段は、前記複数の加速度センサからの加速度データのそれぞれと、当該加速度データと対応する基準データのそれぞれとに基づいて、それぞれの加速度データを補正するための補正値を当該複数の加速度センサのそれぞれについて算出する、請求項1記載の動作計測装置。
【請求項3】
それぞれの前記加速度センサが装着されるべき部位それぞれに対応して所定の閾値を記憶する閾値記憶手段、
前記閾値記憶手段に記憶された所定の閾値と、前記加速度データ検出手段によって検出された加速度データの最大変化量とを比較する比較手段、および
前記比較手段の結果、前記最大変化量が前記所定の閾値を超えるとき、当該最大変化量を示す加速度についての加速度データを出力する加速度センサを、当該所定の閾値に対応する部位の加速度を検出する加速度センサとして決定する部位決定手段をさらに備える、請求項2記載の動作計測装置。
【請求項4】
前記補正値算出手段は、前記加速度センサを前記所定の方向で前記被験者に装着した状態からの回転角度を補正する補正値を算出する、請求項1ないし3のいずれかに記載の動作計測装置。
【図1】

【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図12】

【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−307207(P2008−307207A)
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2007−157561(P2007−157561)
【出願日】平成19年6月14日(2007.6.14)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度独立行政法人情報通信研究機構「民間基盤技術研究促進制度/日常行動・状況理解に基づく知識共有システムの研究開発」、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成19年6月14日(2007.6.14)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成19年度独立行政法人情報通信研究機構「民間基盤技術研究促進制度/日常行動・状況理解に基づく知識共有システムの研究開発」、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
[ Back to top ]