
放射線CT装置
【課題】鮮明な高倍率断層画像を取得することができるX線CT装置を提供する。
【解決手段】本発明によれば、テーブル2の載置位置のファントムを撮影するプレ撮影を行ったあと、テーブル2および検出器3をプレ撮影と同じ様式で移動させて試料を撮影する実撮影を行って断層画像を再構成する構成となっている。再構成部10は、実撮影X線画像Qの撮影時におけるテーブル2の移動の様式を考慮することができる。しかし、テーブル2がプレ撮影と実撮影で全く同じように移動するとは限らない。そこで、本発明によれば、テーブル2のウラ面のマーカを撮影し、実撮影マーカ画像Nとプレマーカ画像Mとによってプレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識する。結果として高解像度の断層画像を取得可能なX線CT装置が提供できる。
【解決手段】本発明によれば、テーブル2の載置位置のファントムを撮影するプレ撮影を行ったあと、テーブル2および検出器3をプレ撮影と同じ様式で移動させて試料を撮影する実撮影を行って断層画像を再構成する構成となっている。再構成部10は、実撮影X線画像Qの撮影時におけるテーブル2の移動の様式を考慮することができる。しかし、テーブル2がプレ撮影と実撮影で全く同じように移動するとは限らない。そこで、本発明によれば、テーブル2のウラ面のマーカを撮影し、実撮影マーカ画像Nとプレマーカ画像Mとによってプレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識する。結果として高解像度の断層画像を取得可能なX線CT装置が提供できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検査対象に放射線を照射して、断層撮影を行う放射線CT装置に関し、特に検査対象の試料を載置するテーブルが可動となっている放射線CT装置に関する。
【背景技術】
【0002】
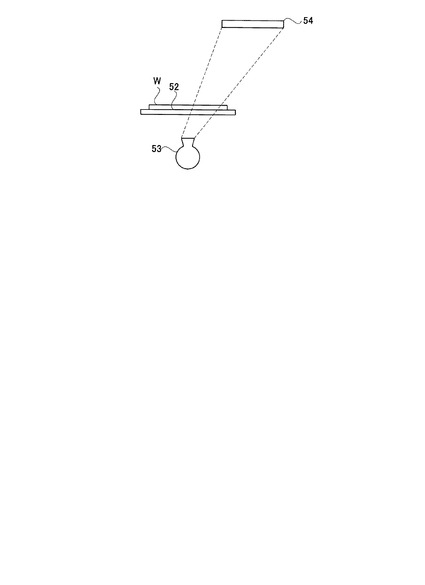
工場などには、検査対象に放射線を照射して、断層撮影を行う放射線CT装置が配備されている。この放射線CT装置は、図20に示すように、放射線を照射する放射線源53と、検査対象の試料を載置するテーブル52と、放射線を検出する検出器54とを備えている。水平に置かれたテーブル52の下側に放射線源53が設けられており、テーブル52の上側に検出器54が設けられている(例えば特許文献1参照)。
【0003】
検出器54は、テーブル52と平行な平面に属する仮想円に沿って移動できるようになっており、テーブル52は、テーブル52に備えられたXYステージにより、鉛直方向と直交するX方向、および鉛直方向・X方向に直交するY方向に移動する。
【0004】
検査対象の断層像は、まず検査対象の試料Wの放射線撮影を異なる方向から複数回行って、次に得られた複数の画像を再構成することで取得される。異なる方向から複数の撮影を行うには、試料Wに対する放射線源53および検出器54の位置を変更させながら複数の撮影を行う必要がある。従来の放射線CT装置では、放射線源53を固定する構成となっているものがある。このような装置では試料Wに対して放射線源53および検出器54を移動させる代わりに、放射線源53に対して検出器54,試料Wを移動させる構成となっている。
【0005】
したがって、異なる方向から試料Wの撮影を撮影を行う際には、検出器54を仮想円に沿って移動させると同期して試料Wが放射線源53に対して移動される。試料Wの移動はテーブル52をXYステージによりXおよびY方向に移動させることで実現される。断層画像撮影中の検出器54およびテーブル52の放射線源53に対する移動は、厳密に規定された円運動となっている。
【0006】
このテーブル52の移動が正確でないと鮮明な断層画像を取得することができない。断層画像撮影中のテーブル52の移動が規定の軌跡からずれると、テーブル52上の試料Wが撮影中に移動したのと同様に取得される断層画像がボケてしまう。従来構成では、この様な断層画像のボケの原因となるテーブル52の位置ズレを防止する目的で、テーブル52を駆動させるXYステージにリニアエンコーダを配備し、テーブル52の移動を正確に行えるようにしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−106515号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来の放射線CT装置においては、次のような問題点がある。
すなわち、従来の放射線CT装置においては、高倍率の断層画像において、鮮明な画像を取得することができない。
【0009】
断層撮影を行う際に、僅かでもテーブル52の移動が規定の軌跡からずれると、検出器54に投影される試料Wの放射線像の位置が本来の位置から大きくずれてしまう。放射線源53は放射線を放射状に照射するので、テーブル52に載置された試料Wの像は、拡大されて検出器54に投影される。したがって、テーブル52上の試料Wの位置ズレも拡大されて検出器54上に現れてしまう。これがテーブル52の移動の僅かなズレにより放射線像が大きくずらされる理由である。
【0010】
このような放射線像のズレは、特に高倍率の断層画像を取得しようとする時に問題となる。高倍率の断層画像においてはテーブル52の位置ズレの影響が相対的に大きいからである。
【0011】
従来の放射線CT装置においては、高倍率の断層画像を鮮明に得ることができない。テーブル52を駆動するXYステージの移動量の精度に限界があるからである。
【0012】
本発明は、この様な事情に鑑みてなされたものであって、その目的は、試料を放射線源に対して正確に移動することができなくても、鮮明な高倍率断層画像を取得することができる放射線CT装置を提供することにある。
【課題を解決するための手段】
【0013】
本発明は上述の課題を解決するために次のような構成をとる。
すなわち、本発明に係る放射線CT装置は、マーカを有するウラ面とオモテ面とを備える試料載置用のテーブルと、放射線をテーブルに一方の面から照射する放射線源と、テーブルを放射線源に対して移動させるテーブル移動手段と、テーブル移動手段を制御するテーブル移動制御手段と、テーブルを透過してきた放射線を検出するテーブルの他方の面側に設けられた放射線検出器と、放射線検出器を放射線源に対して移動させる検出器移動手段と、検出器移動手段を制御する検出器移動制御手段と、放射線画像の撮影の度にテーブルのウラ面のマーカを可視光で撮影して検出信号を出力する光学カメラと、放射線検出器が出力した検出信号を基に、テーブルの載置位置に校正用の被写体を置いた状態で放射線源に対してテーブルおよび放射線検出器を移動させることにより撮影方向を変えながら被写体を次々と撮影するプレ撮影において一連のプレ放射線画像を生成するとともに、テーブルの載置位置に試料を置いた状態でテーブルおよび放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料を次々と撮影する実撮影において一連の実撮影放射線画像を生成する画像生成手段と、光学カメラが出力した検出信号を基に、プレ撮影においてマーカが写り込んだ一連のプレマーカ画像を生成するとともに、実撮影においてマーカが写り込んだ一連の実撮影マーカ画像を生成する光学画像生成手段と、実撮影マーカ画像とプレマーカ画像とによって、プレ撮影と実撮影との間で生じたテーブルの位置ズレを認識するとともに一連のプレ放射線画像によって撮影時のテーブルの移動の様式を認識して、一連の実撮影放射線画像を基に断層画像を再構成する再構成手段とを備えることを特徴とするものである。
【0014】
[作用・効果]本発明によれば、テーブルの載置位置に校正用の被写体を置いた状態で放射線源に対してテーブルおよび放射線検出器を移動させることにより撮影方向を変えながら被写体を次々と撮影するプレ撮影を行ったあと、テーブルおよび放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料を次々と撮影する実撮影を行って、一連のプレ放射線画像と一連の実撮影放射線画像とを基に断層画像を再構成する構成となっている。再構成手段は、実撮影に先立ってプレ放射線画像により撮影時のテーブルおよび放射線検出器の移動の様式を認識する。そして、一連の実撮影放射線画像とを基に断層画像を再構成すれば、実撮影放射線画像の撮影時におけるテーブルおよび放射線検出器の移動の様式を考慮することができるので、高解像度の断層画像を取得できる。
【0015】
しかし、この方法には難点がある。すなわち、テーブルがプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブルのウラ面にマーカを備えている。このマーカは、プレ撮影と実撮影の間、光学カメラによって撮影される。再構成手段は、断層画像を再構成する際に実撮影で得られた実撮影マーカ画像とプレ撮影で得られたプレマーカ画像とによってプレ撮影と実撮影との間で生じたテーブルの位置ズレを認識する。そして再構成手段は、この位置ズレを考慮して試料の断層画像を生成する。この様に構成すれば、例えプレ撮影と実撮影との間でテーブルの移動の様式が異なっていたとしても、再構成手段は実撮影におけるテーブルの位置を正確に知ることができる。結果として高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【0016】
また、上述の放射線CT装置において、一連のプレ放射線画像を基に放射線源に対するテーブルの位置を示す位置変数をプレ放射線画像毎に取得する位置変数取得手段と、実撮影マーカ画像とプレマーカ画像とを照合して、プレ撮影と実撮影におけるテーブルの位置ズレを示すズレ量を実撮影マーカ画像毎に取得するズレ量取得手段と、ズレ量を基に位置変数を補正して、実撮影における放射線源に対するテーブルの位置を示す補正位置変数を位置変数毎に取得する位置変数補正手段と、再構成手段が一連の実撮影放射線画像と補正位置変数とを用いて断層画像を再構成すればより望ましい。
【0017】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。すなわち、プレ撮影によりテーブルの移動の様子を示す位置変数を取得し、実撮影マーカ画像とプレマーカ画像とを照合して位置変数を補正して補正位置変数を取得し、再構成手段が補正位置変数を基に動作すれば、プレ撮影と実撮影との間でテーブルの移動の様式が異なっていたとしても、再構成手段は実撮影におけるテーブルの位置を考慮に入れて断層画像を生成することができる。
【0018】
また、上述の放射線CT装置において、テーブルのウラ面の全面にマーカが設けられていればより望ましい。
【0019】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。すなわち、テーブルのウラ面の全面にマーカが設けられていれば、テーブルがどのように移動しても光学カメラは、マーカを確実に撮影することができる。
【0020】
また、上述の放射線CT装置において、テーブルは、額縁状の周縁部材と周縁部材の内側に収容されるとともに周縁部材から着脱可能な中央板とを有し、周縁部材と中央板とには、互いの位置関係を示す印が付されており、光学カメラが中央板が周縁部材から外される前の時点と、中央板が周縁部材から外されて再び収容された後の時点で印を撮影して印画像が取得され、再構成手段が印画像を基に、中央板着脱の前後における周縁部材と中央板との位置変化を認識して試料の断層画像を再構成すればより望ましい。
【0021】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。放射線CT装置においてはメンテナンスの目的でテーブルを装置から外す場合がある。プレ撮影の後、実撮影の前にテーブルを装置から着脱させたとすると、実撮影マーカ画像とプレマーカ画像とを照合しても実撮影におけるテーブルの位置が正確に算出できなくなる。そこで、上述の構成では、テーブルの着脱の前後で、テーブルの位置がどの程度ずれたかを知ることができるようにしている。すなわち、テーブルを着脱可能な中央板と着脱不可能な周縁部材とで構成し、中央板の着脱の前後で中央板が周縁部材からどの程度移動したかを知ることができるようにしている。この様にすることで、プレ撮影の後、実撮影の前に中央板の着脱があったとしても、実撮影におけるテーブルの位置が正確に算出できるようになる。
【0022】
また、上述の放射線CT装置において、試料を載置する試料載置板がテーブルのオモテ面側に設けられており、試料載置板をテーブルに対して移動させる試料載置板移動手段と、試料の断層画像を撮影するに先立って試料載置板移動手段を制御することにより、試料の撮影部分をテーブルにおける校正用の被写体が載置された位置に移動させることを可能とする試料載置板移動制御手段を備えればより望ましい。
【0023】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。テーブルの移動の様式は、テーブルのどの部分で断層画像を撮影するかで異なっている。そこで、上述の構成によれば、試料の撮影部分をテーブルにおける校正用の被写体が載置された位置に移動させる構成を備えている。この様に構成することにより、高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【発明の効果】
【0024】
本発明によれば、テーブルの載置位置の被写体を撮影するプレ撮影を行ったあと、テーブルおよび放射線検出器をプレ撮影と同じ様式で移動させて試料を撮影する実撮影を行って断層画像を再構成する構成となっている。再構成手段は、実撮影放射線画像の撮影時におけるテーブルおよび放射線検出器の移動の様式を考慮することができる。しかし、この方法には難点がある。すなわち、テーブルがプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブルのウラ面のマーカを撮影し、プレマーカ画像とによってプレ撮影と実撮影との間で生じたテーブルの位置ズレを認識する。結果として高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【図面の簡単な説明】
【0025】
【図1】実施例1に係るX線CT装置の構成を説明する機能ブロック図である。
【図2】実施例1に係るテーブルのウラ面を説明する平面図である。
【図3】実施例1に係るテーブルと検出器の移動を説明する斜視図である。
【図4】実施例1に係るテーブルの移動を説明する平面図である。
【図5】実施例1に係るマーカ画像を説明する模式図である。
【図6】実施例1に係るファントムを説明する斜視図である。
【図7】実施例1に係るプレ撮影について説明する模式図である。
【図8】実施例1に係る実撮影について説明する模式図である。
【図9】実施例1に係るマーカ画像を説明する模式図である。
【図10】実施例1に係る位置変数の補正動作を説明する模式図である。
【図11】実施例1に係るX線CT装置の動作を説明するフローチャートである。
【図12】実施例2に係るX線CT装置の構成を説明する機能ブロック図である。
【図13】実施例2に係る試料載置板移動機構の構成を説明する平面図である。
【図14】実施例2に係るX線CT装置の構成を説明する模式図である。
【図15】実施例2に係るX線CT装置の構成を説明する模式図である。
【図16】実施例2に係るX線CT装置の構成を説明する模式図である。
【図17】本発明の1変形例を説明する斜視図である。
【図18】本発明の1変形例を説明する平面図である。
【図19】本発明の1変形例を説明する模式図である。
【図20】従来の構成を説明する模式図である。
【発明を実施するための形態】
【0026】
以降、本発明の各実施例を説明する。各実施例におけるX線は、本発明の放射線に相当する。
【実施例1】
【0027】
<X線CT装置の全体構成>
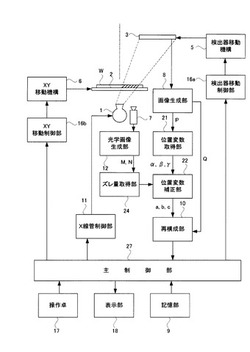
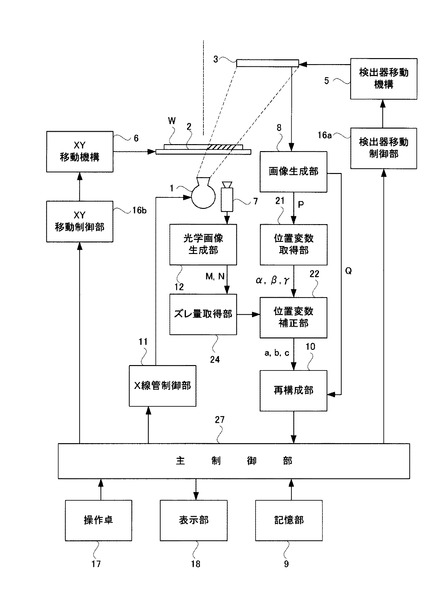
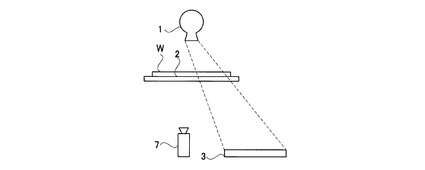
図1は、実施例1に係るX線CT装置の全体構成を示している。X線CT装置は、図1に示すように、試料Wを載置するテーブル2と、テーブル2の下側に設けられたX線を照射するX線発生装置1と、テーブル2の上側に設けられたX線を検出する検出器3と、テーブル2の下側に設けられた光学カメラ7とを備えている。
【0028】
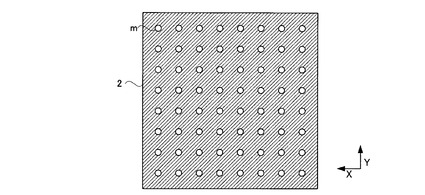
テーブル2は、作業室の床面に平行な矩形となっている。テーブル2の各辺は、縦方向(Y方向),横方向(X方向)のいずれかに伸びている。テーブル2は、試料Wを載置するオモテ面とこの反対側の面であるウラ面を有している。テーブル2のオモテ面は、検出器3に面しており、ウラ面は、X線発生装置1および光学カメラ7に面している。テーブル2の具体的は大きさは例えば50×50cmである。X方向、Y方向、および鉛直方向は互いに直交する。
【0029】
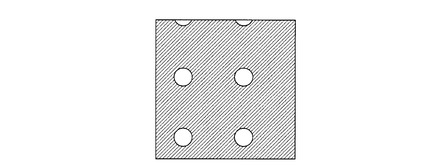
図2は、テーブル2のウラ面を表した平面図である。テーブル2のウラ面の全面にマーカmがY方向およびX方向に沿って2次元マトリックス状に配列されている。このマーカmは、テーブル2のウラ面を撮影する光学カメラ7によって撮影される。
【0030】
検出器3は、X線発生装置1から発せられ、テーブル2を透過してきたX線を入射させ、X線を検出する。検出器3は、具体的にはイメージインテンシファイアが用いられる。
【0031】
XY移動機構6(XYステージ)は、テーブル2をX線発生装置1に対してX方向、およびY方向に移動させる目的で設けられている。XY移動機構6の移動により、テーブル2は、矩形となっているテーブル2を延長する平面上を移動することになる。XY移動制御部16bは、XY移動機構6を制御する目的で設けられている。また、検出器移動機構5は、検出器3をX線発生装置1に対して回転移動させる目的で設けられている。検出器移動制御部16aは、検出器移動機構5を制御する目的で設けられている。
【0032】
X線CT装置は、テーブル2に載置された試料Wを撮影方向を変えながら複数回に亘ってX線撮影をし、得られた画像を再構成することで断層画像を取得する。したがって、X線CT装置は、X線発生装置1および検出器3が撮影中に試料Wに対して移動するようになっている。実際は、検出器3およびテーブル2の試料WがX線発生装置1に対して移動することで試料Wの撮影方向の変更が行われる。
【0033】
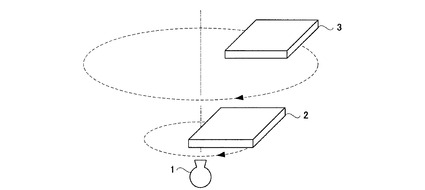
図3は、X線CT装置が断層画像を撮影するときのテーブル2および検出器3の移動の様子を表している。断層画像を撮影する場合には、図3に示すように、検出器3がX線発生装置1から鉛直方向に伸びる中心軸を中心に回転移動される。このとき、中心軸に対する検出器3の向きは固定されていて、中心軸に対向している検出器3の一辺は常に同一である。この回転移動は、検出器移動機構5が実現する。また、この検出器3の回転移動に同期してテーブル2もX線発生装置1から鉛直方向に伸びる中心軸を中心に回転移動される。この回転移動は、XY移動機構6が実現する。図1及び図3では、検出器3の検出面の中心に立てた法線が鉛直方向(検出器の面が水平)になっているが、検出器3の検出面の中心に立てた法線がX線発生装置1のX線発生点に向くように配置してもよい。
【0034】
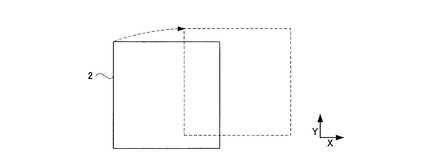
図4は、断層画像を撮影する際のテーブル2の回転移動を説明している。図4に示すようにXY移動機構6は、テーブル2の4辺がX方向またはY方向に平行となっている状態を保った状態でテーブル2の各頂点が弧を描くようにテーブル2を回転移動させる。
【0035】
光学カメラ7は、テーブル2のウラ面を可視光で撮影して検出信号を出力する。テーブル2のウラ面には十分な点数のマーカmが設けられており、テーブル2のウラ面を撮影する光学カメラ7の視野には必ずマーカmが写り込むようになっている。例えテーブル2がX線発生装置1に対して回転移動したとしても、光学カメラ7の視野にはテーブル2に設けられたマーカmのいずれかが常に写り込んでいる。
【0036】
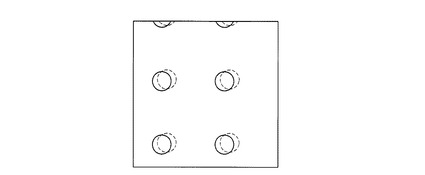
光学カメラ7がテーブル2のウラ面を撮影すると、検出信号を光学画像生成部12に出力する。光学画像生成部12は、この検出信号を基にマーカmが写り込んだマーカ画像を生成する。マーカ画像は図5に示すように複数のマーカmを写し込んだものとなっている。
【0037】
画像生成部8は、検出器3が出力した検出信号を基に被写体の透視像が写り込んだX線画像を生成する。再構成部10は、画像生成部8が生成した複数枚のX線画像を基に断層画像を再構成する。
【0038】
X線制御部11は、X線発生装置1のX線照射の制御を行う目的で設けられている。操作卓17は、操作者の指示をX線CT装置に入力させる目的で設けられている。表示部18は、撮影された断層画像が表示されるものである。記憶部9は、マーカ画像等の断層画像撮影に必要な情報の一切を記憶する。また、主制御部27は、各制御部を統括的に制御する目的で設けられている。この主制御部27はCPUによって構成され、各種のプログラムを実行することにより各制御部11,16a,16bおよび各部8,10,12,21,22,24を実現している。また、上述の各部は、それらを担当する演算装置に分割されて実行されても良い。位置変数取得部21,位置変数補正部22,ズレ量取得部24の動作については後述のものとする。
【0039】
<位置変数の意味>
本発明のX線CT装置は、解像度の高い断層画像を取得する目的で、位置変数の概念を用いている。断層画像の撮影が開始されると、テーブル2と検出器3とが回転移動しながら複数枚の透視画像が取得される。この透視画像の各々は、テーブル2の位置が互いに異なる状態で撮影されたものとなっている。位置変数は、透視画像の間でテーブル2の位置が具体的にどのように異なるのかを示す変数となっている。本発明においては、テーブル2と検出器3とが1回転する間に100枚の透視画像が生成されるので、位置変数はこの100枚の透視画像の各々について取得されることになる。ただし、以下の説明では100枚の透視像から断層像を再構成する例で説明しているが、何枚の断層像を使用するかは操作者が任意に決めればよいことであり、本発明が100枚に限定されるものではない。
【0040】
位置変数は、具体的には互いに独立した5個程度のパラメータを備えたデータセットとなっている。連写された100枚の透視画像のうち、2枚の異なる透視画像についての位置変数を比較すると、一方の透視画像を撮影したときのテーブル2の位置が、他方の透視画像を撮影したときのテーブル2の位置からどの方向にどの程度だけ異なるかが分かるようになっている。
【0041】
本発明は、100枚のX線画像を再構成して断層画像を生成する構成となっている。この際、位置変数は、100枚のX線画像を取得する毎に求められる。X線画像に対応する位置変数により、このX線画像を撮影したときの被写体の撮影方向が正確に割り出せる。この正確な撮影方向を考慮に入れて断層画像を生成するようにすれば、より解像度の高い断層像を取得することができる。
【0042】
一般的に良く用いられる断層画像の生成方法は、位置変数を取得しない。すなわち、この方法は、テーブル2および検出器3をそれぞれ回転させながら被写体を撮影して100枚の透視画像を取得し、この透視画像を基に断層画像を生成するというものである。この方法では、テーブル2および検出器3を正円に沿って回転するように制御しているから、各々の透視画像が幾何学計算により求められる所定の方向から撮影されたものであるとして断層画像の再構成を行う。
【0043】
しかし、実際には、移動機構の精度の問題から、テーブル2および検出器3は、完全に正円に沿って回転されるわけではない。一般的な方法では、これを無視して断層画像を再構成することになる。したがって、この方法では、被写体の実際の撮影方向が理想の方向からずれているにもかかわらず、理想の撮影方向で被写体を撮影したとして断層画像を再構成してしまう。すると、高解像度の断層像が取得できない。
【0044】
本発明では、この点、位置変数を取得して実際の撮影方向を各々の透視画像で割り出して再構成を行うようにしているので、高解像度の断層画像が取得できる。この実際の撮影方向の割り出しに必要な位置変数は、テーブル2に試料Wの代わりに校正用のファントムを置いた状態で試料の撮影と同様の動作で校正用ファントムを撮影して取得した100枚の透視画像を基に生成される。つまり、本発明では校正用ファントムの撮影により予め位置変数を取得しておいて、その後、実際の試料Wをテーブル2に置いて100枚の透視画像を撮影する。試料Wの断層画像は、試料Wの撮影(実撮影)で得られた透視画像と、校正用ファントムの撮影(プレ撮影)で得られた位置変数とを基に生成される。
【0045】
実撮影における試料Wの撮影方向を知るには、本来は実撮影時のテーブル2の位置情報を用いなければならない。しかし、テーブル2の位置を示す位置変数は、形状が予め分かっている校正用ファントムを撮影しなければ取得できない。したがって、本発明のX線CT装置は、実撮影時におけるテーブル2の位置情報の代わりにプレ撮影で取得された位置変数を断層画像の再構成に用いる構成となっている。
【0046】
ここで問題となるのが、テーブル2の回転移動の再現性である。実撮影におけるテーブル2の移動の様子は、プレ撮影の時とほとんど同じであると考えられるが、実際には僅かにずれる。このズレの補償は本発明の最も特徴的な部分であり、後述のものとする。
【0047】
<位置変数の算出>
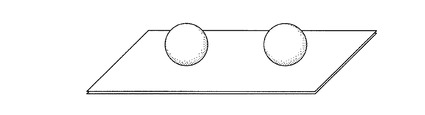
位置変数の算出方法について説明する。位置変数を算出するには、図6に示すような2つの球体を有するファントムが用いられる。この球体の大きさと球体同士の距離は既知のものである。テーブル2に図6のファントムを置いてプレ撮影が行われる。すると、画像生成部8は、2つの球体を様々な方向から撮影した100枚の透視画像を生成する。この透視画像をプレX線画像Pと呼ぶことにする。
【0048】
生成されたプレX線画像Pは、位置変数取得部21に送出される。位置変数取得部21は、プレX線画像Pの各々に写り込んだ2の球体の透視像を基にテーブル2の位置および傾斜角度を3次元的に認識する。位置変数取得部21は、これらのテーブル2の位置情報を位置変数として算出する。この位置情報の取得は、プレX線画像P毎に行われる。
【0049】
プレ撮影と実撮影との間でテーブル2の移動の様式が完全に一致していれば、プレ撮影で取得した位置情報と100枚の実撮影X線画像Qとで高解像度の断層画像が取得できる。しかし、実際には、プレ撮影と実撮影との間でテーブル2の移動の軌跡は僅かに異なる。本発明はこのズレを補償する目的でマーカmとこれを撮影する光学カメラ7とが設けられている。
【0050】
<プレ撮影におけるマーカ画像の撮影>
プレ撮影において、光学カメラ7は、プレX線画像Pが撮影される度に、テーブル2のウラ面を撮影する。すると図5で説明したようなプレマーカ画像MがプレX線画像Pの枚数と同じ100枚だけ取得される。
【0051】
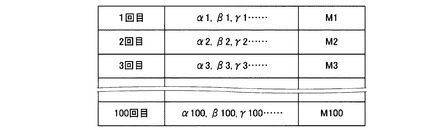
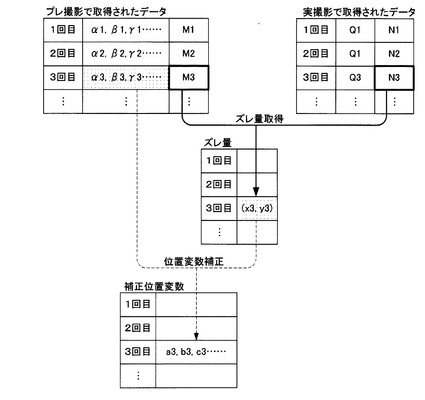
図7は、プレ撮影終了後に記憶部9に記憶されるプレ撮影で取得されたデータテーブルを表している。プレX線画像Pの撮影は、100回に亘って行われ、プレX線画像Pの各々を基に取得された位置変数(α,β,γ……)が記憶部9に記憶される。記憶部9は、光学カメラ7が撮影したプレマーカ画像Mを位置変数(α,β,γ……)と関連づけて記憶する。図7においてn回目のプレX線画像Pで取得された位置変数をαn,βn,γn……で表し、このプレX線画像Pを撮影したときに得られたプレマーカ画像をMnで表している。
【0052】
このプレマーカ画像Mは、プレ撮影と実撮影との間で起こるテーブル2の位置ズレを示す指標となっている。すなわち、実撮影においてプレ撮影と同様にマーカ画像の撮影を行ってみて、プレマーカ画像Mと実撮影における実撮影マーカ画像Nとを比較すれば、プレ撮影と実撮影との間でテーブル2の位置ズレの程度を知ることができる。
【0053】
<実撮影におけるマーカ画像の撮影>
試料Wをテーブル2に置いた状態で実行される実撮影においても、X線CT装置は、プレ撮影と同様の動作をする。プレ撮影と異なる点は、テーブル2に置かれた物体がファントムから試料Wに変化している点のみである。
【0054】
実撮影においては、テーブル2に校正用のファントムの代わりに試料Wを置いた状態でプレ撮影と同様の動作で試料Wを撮影して100枚の実撮影X線画像Qを取得する。このとき光学カメラ7は、実撮影X線画像Qが撮影される度に、テーブル2のウラ面を撮影する。すると図5で説明したような実撮影マーカ画像Nが実撮影X線画像Qの枚数と同じ100枚だけ取得される。つまり、X線CT装置は、一連のプレ撮影において、n回目の撮影におけるX線発生装置1に対するテーブル2と検出器3との位置関係は、一連の実撮影において、n回目の撮影におけるX線発生装置1に対するテーブル2と検出器3との位置関係と一致するように動作する。しかし、機械的精度の問題から、各位置関係はプレ撮影と実撮影との間で僅かにずれてしまう。
【0055】
図8は、実撮影終了後に記憶部9に記憶される実撮影で取得されたデータテーブルを表している。実撮影X線画像Qの撮影は、100回に亘って行われ、実撮影X線画像Qの各々が記憶部9に記憶される。記憶部9は、光学カメラ7が撮影した実撮影マーカ画像Nを実撮影X線画像Qと関連づけて記憶する。図8においてn回目の実撮影X線画像をQnで表し、実撮影X線画像Qnを撮影したときに得られた実撮影マーカ画像をNnで表している。
【0056】
図9は、プレ撮影においてn回目に取得されたプレマーカ画像Mnと実撮影においてn回目に取得された実撮影マーカ画像Nnとを重ね合わせて表示している。プレマーカ画像Mnに写り込んでいるマーカは、図9において破線で示している。同様に、実撮影マーカ画像Nnに写り込んでいるマーカは、図9において実線で示している。図9において実線のマーカと破線のマーカとが完全に重ならないということは、プレ撮影のn回目の撮影におけるテーブル2の位置と、実撮影のn回目の撮影におけるテーブル2の位置とが互いに異なっていることになる。とはいえ、プレ撮影と実撮影との間でテーブル2は同じ運動をするように動作されるので、マーカ画像上におけるマーカの位置ズレは、プレマーカ画像Mn上のマーカが実撮影マーカ画像Nn上のどのマーカに対応するかが判別できる程度に僅かである。
【0057】
マーカ画像M,Nを用いたテーブル2の位置ズレの補償の方法について説明する。光学画像生成部12が生成したプレマーカ画像Mおよび実撮影マーカ画像Nは、ズレ量取得部24に送出される。ズレ量取得部24は、マーカ画像M,Nを基にズレ量を取得する。ズレ量は、プレ撮影と実撮影との間で起こるテーブル2の位置ズレ量を示すものとなっている。
【0058】
ズレ量取得部24は、プレマーカ画像Mおよび実撮影マーカ画像Nの相関を取得する。すると、マーカ画像M,Nにおけるマーカの位置のズレを表すベクトル(ズレ量)が取得できる。図10の実線の矢印は、ズレ量取得部24のマーカ画像M,Nの照合によりマーカ画像M,Nに写り込んだマーカのズレ量が取得される様子を表している。図10では、ズレ量取得部24は、3回目の撮影に係るマーカ画像Mn,Nnとから、3回目の撮影に係るズレ量(x3,y3)を取得している。このようにズレ量取得部24は、プレ撮影と実撮影の間にテーブル2が同じ移動をすることにより、テーブル2がX線発生装置1に対して同じ位置となっている時に撮影されたマーカ画像M,N同士を照合してズレ量を取得する。このズレ量の取得は、100枚の実撮影マーカ画像Nごとに行われる。
【0059】
ズレ量取得部24が取得したズレ量は、位置変数補正部22に送出される。位置変数補正部22は、ズレ量を基にプレ撮影で得られた位置変数を補正して、実撮影におけるX線発生装置1に対するテーブル2の位置を取得する。図10の破線で示す矢印は、位置変数補正部22の位置変数およびズレ量の照合により位置変数が補正される様子を表している。図10では、位置変数補正部22は、3回目の撮影に係る位置変数(α3,β3,γ3)と3回目の撮影に係るズレ量(x3,y3)とから、3回目の撮影に係る補正位置変数(a3,b3,c3)を取得している。このように位置変数補正部22は、n回目の撮影に係る位置変数(αn,βn,γn)とn回目の撮影に係るズレ量(xn,yn)とから、n回目の撮影に係る補正位置変数(an,bn,cn)を取得する。この補正は、100の位置変数ごとに行われる。
【0060】
この様にして取得された補正位置変数は、実撮影におけるテーブル2の位置を正確に示すものとなっている。補正位置変数は、プレ撮影で得られた位置変数をプレ撮影と実撮影との間で起こるテーブル2の位置ズレ量で補正することで取得したものだからである。
【0061】
<X線CT装置の動作>
次に、図11を参照して、X線CT装置の動作について説明する。なお、この動作において、ファントムを用いた校正は、試料Wの断層画像の撮影の度に行われるものとする。
【0062】
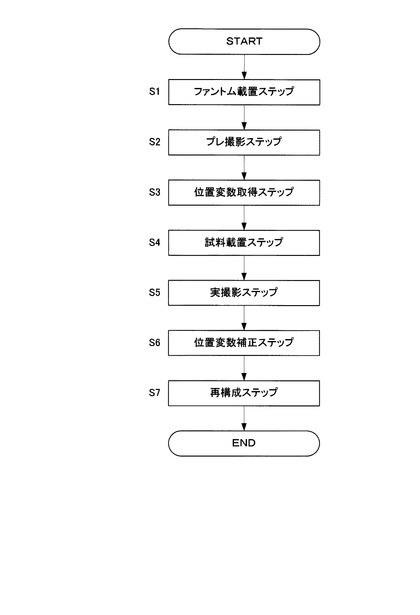
X線CT装置の動作としては、図11に示すように、まず、ファントムがテーブル2に載置され(ファントム載置ステップS1),操作者が操作卓17を操作してプレ撮影を開始させる(プレ撮影ステップS2)。そしてプレ撮影で得られたX線画像からテーブル2の位置を示す位置変数が取得され(位置変数取得ステップS3),試料Wがテーブル2に載置される(試料載置ステップS4)。続いて、操作者が操作卓17を操作して実撮影を開始させ(実撮影ステップS5),マーカ画像M,Nにより取得されたズレ量を基に位置変数の補正が行われる(位置変数補正ステップS6)。最後に実撮影で得られたX線画像と補正位置変数とを基に試料Wの断層画像が取得される(再構成ステップS7)。以降これらの各ステップについて順を追って説明する。
【0063】
<ファントム載置ステップS1,プレ撮影ステップS2>
まず、図6で説明したファントムがテーブル2のオモテ面の載置位置に載置される。操作者が操作卓17を操作してプレ撮影の開始の指示をX線CT装置に与えると、テーブル2および検出器3の回転移動が開始されるとともに、X線制御部11の制御によりX線発生装置1からX線が間歇的に照射される。こうして、ファントムを撮影するプレ撮影が行われる。
【0064】
X線発生装置1から照射されたX線は、ファントムを透過して検出器3で検出される。画像生成部8は、検出器3が出力した検出信号を基に、撮影方向を変えながらファントムを写し込んだ一連のプレX線画像Pを100枚生成する。
【0065】
光学カメラ7は、プレX線画像Pが撮影される度にテーブル2のウラ面を可視光で撮影する。光学画像生成部12は、光学カメラ7が出力した検出信号を基に、テーブル2のウラ面のマーカmを写し込んだ一連のプレマーカ画像Mを100枚生成する。
【0066】
<位置変数取得ステップS3>
プレX線画像Pは、位置変数取得部21に送出される。位置変数取得部21は、一連のプレX線画像Pを基にX線発生装置1に対するテーブル2の位置を示す位置変数(α,β,γ……)をプレX線画像P毎に取得する。位置変数(α,β,γ……)およびプレマーカ画像Mは、プレ撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0067】
<試料載置ステップS4,実撮影ステップS5>
プレ撮影の終了後、操作者は、ファントムをテーブル2から除去して、テーブル2におけるファントムが載置されていた載置位置と同じ位置に試料Wを載置する。この試料Wは断層画像を取得する必要のある実際の撮影対象である。操作者が操作卓17を操作して実撮影の開始の指示をX線CT装置に与え得ると、テーブル2および検出器3の回転移動が開始されるとともに、X線制御部11の制御によりX線発生装置1からX線が間歇的に照射される。こうして、試料Wを撮影する実撮影が行われる。このときのテーブル2および検出器3の移動の様式は、プレ撮影と同じ様式となっている。
【0068】
X線発生装置1から照射されたX線は、試料Wを透過して検出器3で検出される。画像生成部8は、検出器3が出力した検出信号を基に、撮影方向を変えながら試料Wを写し込んだ一連の実撮影X線画像Qを100枚生成する。光学カメラ7は、実撮影X線画像Qが撮影される度にテーブル2のウラ面を可視光で撮影する。光学画像生成部12は、光学カメラ7が出力した検出信号を基に、テーブル2のウラ面のマーカmを写し込んだ一連の実撮影マーカ画像Nを100枚生成する。実撮影X線画像Qおよび実撮影マーカ画像Nは、実撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0069】
<位置変数補正ステップS6>
実撮影の終了後、ズレ量取得部24は、記憶部9に記憶されたプレマーカ画像Mと実撮影マーカ画像Nとを撮影回数毎に照合して、プレ撮影と実撮影におけるテーブル2の位置ズレを示すズレ量(x,y)を取得する。ズレ量(x,y)は、プレ撮影および実撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0070】
位置変数補正部22は、記憶部9に記憶されたズレ量(x,y)と位置変数(α,β,γ……)とを読み出して、ズレ量(x,y)を基に位置変数(α,β,γ……)を撮影回数毎に補正して、実撮影におけるX線発生装置1に対するテーブル2の位置を示す補正位置変数(a,b,c……)を取得する。
【0071】
<再構成ステップS7>
補正位置変数(a,b,c……)は、再構成部10に送られる。再構成部10は、補正位置変数(a,b,c……)により実撮影における試料Wの撮影方向を撮影回数毎に認識する。そして、再構成部10は、記憶部9に記憶された一連の実撮影X線画像Qを読み出して、一連の実撮影X線画像Qと補正位置変数(a,b,c……)とを用いて断層画像を再構成する。つまり、再構成部10は、プレマーカ画像Mと実撮影マーカ画像Nとによって、プレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識するとともに、一連のプレX線画像Pによって撮影時のテーブル2の移動の様式を認識して、一連の実撮影X線画像Qとを基に断層画像を再構成することになる。生成された断層画像が表示部18に表示されてX線CT装置の動作は終了となる。
【0072】
以上のように、本発明によれば、テーブル2の載置位置に校正用のファントムを置いた状態でX線発生装置1に対してテーブル2および検出器3を移動させることにより撮影方向を変えながらファントムを次々と撮影するプレ撮影を行ったあと、テーブル2および検出器3をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料Wを次々と撮影する実撮影を行って、一連のプレX線画像Pと一連の実撮影X線画像Qとを基に断層画像を再構成する構成となっている。再構成部10は、実撮影に先立ってプレX線画像Pにより撮影時のテーブル2および検出器3の移動の様式を認識する。そして、一連の実撮影X線画像Qとを基に断層画像を再構成すれば、実撮影X線画像Qの撮影時におけるテーブル2および検出器3の移動の様式を考慮することができるので、高解像度の断層画像を取得できる。
【0073】
しかし、この方法には難点がある。すなわち、テーブル2がプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブル2のウラ面にマーカmを備えている。このマーカmは、プレ撮影と実撮影の間、光学カメラによって撮影される。再構成部10は、断層画像を再構成する際に実撮影で得られた実撮影マーカ画像Nとプレ撮影で得られたプレマーカ画像Mとによってプレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識する。そして再構成部10は、この位置ズレを考慮して試料Wの断層画像を生成する。この様に構成すれば、例えプレ撮影と実撮影との間でテーブル2の移動の様式が異なっていたとしても、再構成部10は実撮影におけるテーブル2の位置を正確に知ることができる。結果として高解像度の断層画像を取得可能なX線CT装置が提供できる。
【0074】
上述の構成は、プレ撮影によりテーブル2の移動の様子を示す位置変数(α,β,γ……)を取得し、実撮影マーカ画像Nとプレマーカ画像Mとを照合して位置変数(α,β,γ……)を補正して補正位置変数(a,b,c……)を取得し、再構成部10が補正位置変数(a,b,c……)を基に動作する。すると、プレ撮影と実撮影との間でテーブル2の移動の様式が異なっていたとしても、再構成部10は実撮影におけるテーブル2の位置を考慮に入れて断層画像を生成することができる。
【0075】
上述のようにテーブル2のウラ面には、マーカmが2次元マトリックス状に配列されていれば、テーブル2がどのように移動しても光学カメラは、マーカmを確実に撮影することができる。
【実施例2】
【0076】
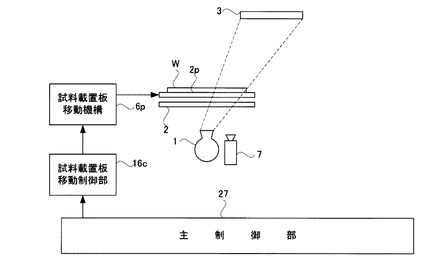
次に、実施例2に係るX線CT装置の構成について説明する。実施例2に係るX線CT装置は、実施例1で説明したX線CT装置の構成とほぼ同様である。異なる点は、テーブル2のオモテ面に試料載置用の試料載置板2pを備えている点である。実施例2においては、ファントムおよび試料Wは試料載置板2pに置かれるのであり、テーブル2のオモテ面には置かれない。試料載置板2pは、矩形となっているテーブル2に倣って矩形となっており、例えばアルミシートから構成されている。
【0077】
図12は、実施例2に係るX線CT装置の機能ブロック図を表している。図12においては、図1で説明した検出器移動機構5,XY移動機構6,画像生成部8,記憶部9,再構成部10,X線制御部11,光学画像生成部12,検出器移動制御部16a,XY移動制御部16b,操作卓17,表示部18,位置変数取得部21,位置変数補正部22,およびズレ量取得部24については省略をしている。
【0078】
実施例2における独自の構成について説明する。試料載置板移動機構6pは、試料載置板2pをテーブル2に対して移動させる目的で設けられており、試料載置板移動制御部16cは、試料載置板移動機構6pを制御する目的で設けられている。試料載置板移動制御部16cは、主制御部27により統括的に制御される。
【0079】
図13は、試料載置板移動機構6pの具体的な構成を示している。試料載置板移動機構6pは、テーブル2の1頂点に設けられた基部6p1を有している。基部6p1は、テーブル2の側辺に倣ったL形状となっている。基部6p1を構成するアームのそれぞれには、試料載置板2pをX方向に移動させるモータ6p3および押ネジ6p4と、試料載置板2pをY方向に移動させるモータ6p5および押ネジ6p6とを備えている。押ネジ6p4はX方向に伸びており、押ネジ6p6は、Y方向に伸びている。
【0080】
試料載置板移動機構6pは、試料載置板2pにおいて基部6p1に最も隣接した1頂点と、基部6p1のアームの結合部における試料載置板2p側の1頂点とを架橋する位置にバネ6p7を有している。このバネは、試料載置板2pに引張力を付与することにより試料載置板2pを基部6p1に対して移動させる目的で設けられている。
【0081】
<実施例1の構成からの改良点>
実施例1の構成では、まずテーブル2の上にファントムを置いてプレ撮影をする。そして、実撮影を行う際には、テーブル2におけるファントムを置いていた載置位置と同じ位置に試料Wを置くことになる。このように実施例1の構成では、ファントムを置く位置と試料Wを置く位置とを一致させなければならないという制約がある。
【0082】
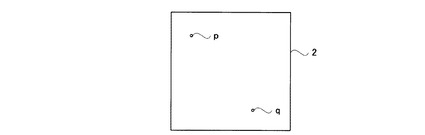
この制約が生じる理由について説明する。図14は、テーブル2における異なる位置p,qを示している。図14におけるpの位置にファントムを置いてプレ撮影をする場合、試料Wを必ずpの位置に置いて実撮影をしなければならない。仮に、pの位置でプレ撮影をしたにも関わらず試料Wをqの位置に置いて実撮影をしたとすると、取得される断層画像がボケてしまう。
【0083】
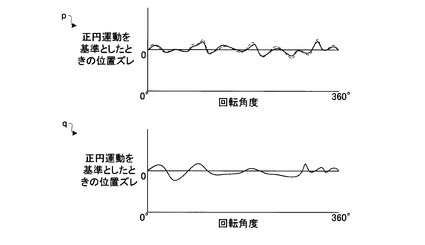
図15は、pの位置にファントムを置いて撮影を行ったときと、qの位置にファントムを置いて撮影を行ったときとで、テーブル2の位置ズレがどのようになるかを示している。グラフの横軸は、テーブル2の回転角度を意味しており、グラフの縦軸は正円運動を基準としたテーブル2の位置ズレを意味している。テーブル2が仮に完全に正円運動をしたとすると、位置ズレは常に0となる。しかし、実際は、機械的精度の問題からテーブル2の運動は図15に示すように正円運動から僅かにずれる。
【0084】
図15の上側の図における実線のグラフは、pの位置を載置位置としてプレ撮影をしたときのテーブル2における正円運動基準の位置ズレである。そして、図15の上側の図における破線のグラフは、pの位置を載置位置として実撮影をしたときのテーブル2における正円運動基準の位置ズレである。実線と破線とを比較すると分かるように、プレ撮影と実撮影とにおけるテーブル2の運動は完全には一致しないまでも、ほぼ近似している。
【0085】
一方、図15の下側の図における実線のグラフは、qの位置を載置位置としてプレ撮影をしたときのテーブル2の位置ズレである。ここで、図15の上側の図の実線のグラフと図15の下側の図の実線のグラフとは互いに近似してはいない。つまり、テーブル2は、どの部分を試料Wの載置位置とするかで回転移動の様式が異なるのである。
【0086】
このようになるのは、テーブル2を駆動させるXY移動機構6の構造に原因がある。XY移動機構6はX方向に伸びたアームとY方向に伸びたアームとを有している。このアームがスライドして移動することでテーブル2の移動が実現される。テーブル2を正円運動させようとしてもテーブル2の移動が理想どおりとならずにガタつくのは、テーブル2を駆動させるアームの表面が理想通りに平坦となっていないことによる。
【0087】
いまここで、テーブル2のpの位置を載置位置としてテーブル2を2回転させたとする。すなわち、ファントムと試料Wとがテーブル2の同じ位置に置かれた場合である。このとき、XY移動機構6は、1回転目と2回転目とでアームの同じ部分を使ってテーブル2を回転させることになる。すると、テーブル2の運動の再現性が高くなる。テーブル2の正円運動を乱すアームの起伏は、1回転目と2回転目で同じだからである。
【0088】
しかし、テーブル2のpの位置を載置位置としてテーブル2を1回転させ、テーブル2のqの位置を載置位置としてテーブル2を1回転させると状況が異なる(図14参照)。すなわち、ファントムと試料Wとがテーブル2の異なる位置に置かれた場合である。この場合、XY移動機構6は、1回転目と2回転目とでアームの異なる部分を使ってテーブル2を回転させることになる。
【0089】
XY移動機構6が有するアームは、その位置に応じて表面の微細な起伏の様子が異なっている。したがって、1回転目と2回転目とでアームの異なる部分を使ってテーブル2が回転されると、テーブル2の正円運動を乱すアームの起伏は、テーブル2回転させる毎に異なることになる。したがって、テーブル2を2回転させるときの運動の再現性は低いものとなる。
【0090】
ところで、実施例1の構成によれば、マーカ画像M,Nを取得することで、テーブル2を2回転させたときの移動様式の多少な変化を補償できるようになってはいる。しかし、テーブル2が1回転目と2回転目とであまりに移動様式が違いすぎると、マーカ画像M,Nを用いた位置変数の補正が不可能となる。すなわち、マーカmの像の位置がプレマーカ画像Mと実撮影マーカ画像Nとの間で違いすぎると、マーカmがどのように移動したかが判別できなくなってしまうのである。マーカmは、テーブル2のウラ面に2次元マトリックス状に配置されており、プレマーカ画像Mに写り込んだマーカが実撮影マーカ画像N上のマーカのどれに対応するかが分からなくなるからである。
【0091】
つまり、実施例1の構成によれば、断層画像を取得するには、断層画像取得した物体が置かれた位置でプレ撮影をしておく必要がある。大きな試料Wの一部の断層画像を取得しようとするときに、試料Wにおける断層画像を取得したい部分が変わる度にプレ撮影を行うのは煩雑である。
【0092】
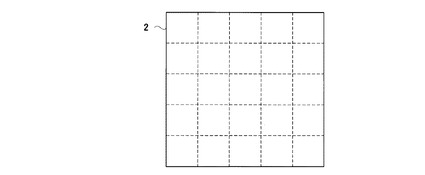
この様な問題点を解決する目的で、実施例2の構成では、テーブル2において断層撮影をする位置を限定している。具体的には、図16に示すように、テーブル2を縦横に5等分する線分を格子状に配列したときに、線分同士が互いに交わる16個の交点を試料Wの載置位置とする。実施例2の構成では、これら16個の交点上にファントムを載置して、16通りのプレ撮影を行っておく。そして、実撮影を行う際には、試料Wにおける断層画像の取得が必要な撮影部分をテーブル2上の16個の交点のうちのいずれかまで移動させる。この様にすることで、プレ撮影のときと実撮影のときとでテーブル2の回転移動は確実に近似したものとなる。
【0093】
実施例2におけるXY移動機構6は、テーブル2の移動の様子をズレ量取得部24および位置変数補正部22に送出している。これにより、ズレ量取得部24および位置変数補正部22は、動作の際、テーブル2における16個の交点のうちのいずれかを選択して撮影が行われたかを認識することができる。そして、実撮影の際、ズレ量取得部24および位置変数補正部22は、16通りあるプレ撮影で得られたデータから、実撮影において選択された交点の位置と同じ位置で取得されたデータを選択して動作する。
【0094】
実施例2におけるX線CT装置においては、試料Wとして基板を想定している。基板の一部を拡大した断層画像を生成したい場合、基板における撮影部分をテーブル2における交点の位置まで移動させなければならない。この移動を実行するのが、試料載置板移動機構6pである。試料載置板移動機構6pによる試料Wの移動は、試料Wの断層画像を撮影するに先立って行われる。
【0095】
この様に構成すれば、実施例1の場合と異なり、断層画像撮影の度にプレ撮影を行う必要がない。したがって、実施例2の構成においては、16通りのプレ撮影をしておけば、しばらくは実撮影を連続して行っても高解像度の断層画像が取得できる。
【0096】
以上のように、実施例2の構成は、本発明のX線CT装置の具体的な構成を示すものとなっている。テーブル2の移動の様式は、テーブル2のどの部分で断層画像を撮影するかで異なっている。そこで、上述の構成によれば、試料Wの撮影部分をテーブル2における校正用のファントムが載置された位置に移動させる構成を備えている。この様に構成することにより、高解像度の断層画像を取得可能なX線CT装置が提供できる。
【0097】
本発明は、上述の構成に限られず、下記のように変形実施することができる。
【0098】
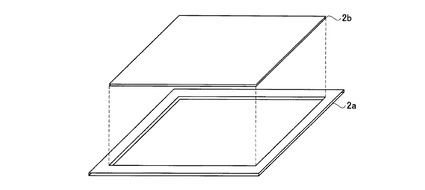
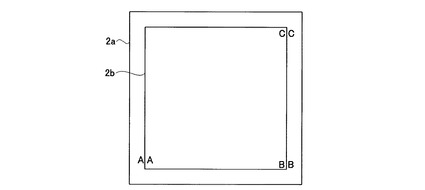
(1)上述の実施例1のテーブル2の構成を図17のように構成してもよい。本変形例によれば、図17に示すように、テーブル2は、額縁状の周縁部材2aと、周縁部材2aの内側に収容される中央板2bとを有している。中央板2bは、周縁部材2aの内穴にはめ込まれる構成となっており、周縁部材2aから着脱可能となっている。中央板2bは、気温の変化により伸縮しにくいカーボンで構成される。本変形例においては、試料Wは、中央板2bに載置される。
【0099】
中央板2bを周縁部材2aから除去すると、テーブル2の下側に設けられているX線発生装置1および光学カメラ7が露出する。X線発生装置1および光学カメラ7のメンテナンスを行うときは、この中央板2bを周縁部材2aから脱着すれば便利である。また、周縁部材2aは、XY移動機構6に固定され、周縁部材2aとXY移動機構6との位置関係はずれることがない。
【0100】
図18は、テーブル2のウラ面を示している。中央板2bには、図2で説明したマーカmが記されているが、図18ではこれを省略している。周縁部材2aと中央板2bとには、互いの位置関係を示す印が記されている。図14においては、矩形となっている周縁部材2aの三隅にA,B,Cを摸した印がされ、矩形となっている中央板2bの三隅にもA,B,Cを摸した印がされている。そして、周縁部材2aおよび中央板2bに付される各印は、同じ印が互いに向き合う位置に配置される。従って、周縁部材2aおよび中央板2bのそれぞれに付されたAの印の位置関係を知れば、Aの印が設けられた角における周縁部材2aおよび中央板2bの位置関係の変化を知ることができる。B,Cの印は、Aの印と同様に周縁部材2aおよび中央板2bの位置関係の変化を知る指標となっている。
【0101】
光学カメラ7は、中央板2bが周縁部材2aから外される前の時点と、中央板2bが周縁部材2aから外されて再び収容された後の時点で印を撮影して印画像を取得する。この印画像には、A,B,Cの印が2つずつ写り込んでいる。印画像は、光学カメラ7が送出した検出信号を光学画像生成部12が生成したものである。
【0102】
再構成部10は、この印画像を基に中央板2b着脱の前後における周縁部材2aと中央板2bとの位置変化を認識して断層画像を再構成する。具体的には、位置変数補正部22は、位置変数(α,β,γ……)を補正する際にマーカ画像M,Nから得られたズレ量のみならず印画像から得られた周縁部材2aに対する中央板2bの位置ズレをも考慮して補正を行う。
【0103】
このように補正することにより、プレ撮影の後、実撮影をする前に中央板2bの着脱があっても、周縁部材2aと中央板2bとの位置ズレにより断層画像がボケることがない。
【0104】
X線CT装置においてはメンテナンスの目的でテーブル2を装置から外す場合がある。プレ撮影の後、実撮影の前にテーブル2を装置から着脱させたとすると、実撮影マーカ画像Nとプレマーカ画像Mとを照合しても実撮影におけるテーブル2の位置が正確に算出できなくなる。そこで、上述の構成では、テーブル2の着脱の前後で、テーブル2の位置がどの程度ずれたかを知ることができるようにしている。すなわち、テーブル2を着脱可能な中央板2bと着脱不可能な周縁部材2aとで構成し、中央板2bの着脱の前後で中央板2bが周縁部材2aからどの程度移動したかを知ることができるようにしている。この様にすることで、プレ撮影の後、実撮影の前に中央板2bの着脱があったとしても、実撮影におけるテーブル2の位置が正確に算出できるようになる。
【0105】
(2)上述の各実施例ではX線発生装置1および光学カメラ7がテーブル2の下側に設けられており、検出器3がテーブル2の上側に設けられた構成であったが、本発明はこの様な構成に限られない。すなわち図19に示すように、検出器3および光学カメラ7がテーブル2の下側に設けられており、X線発生装置1がテーブル2の上側に設けられた構成としてもよい。この様な構成においてもテーブル2の試料を載置する面はオモテ面であり、オモテ面とは反対側のウラ面には、マーカmが設けられている。
【符号の説明】
【0106】
m マーカ
M プレマーカ画像
N 実撮影マーカ画像
1 X線発生装置(放射線源)
2 テーブル
2a 周縁部材
2b 中央板
2p 試料載置板
3 検出器(放射線検出器)
5 検出器移動機構(検出器移動手段)
6 XY移動機構(テーブル移動手段)
7 光学カメラ
8 画像生成部(画像生成手段)
12 光学画像生成部(光学画像生成手段)
16a 検出器移動制御部(検出器移動制御手段)
16b XY移動制御部(テーブル移動制御手段)
16c 試料載置板移動制御部(試料載置板移動制御手段)
22 位置変数補正部(位置変数補正手段)
24 ズレ量取得部(ズレ量取得手段)
【技術分野】
【0001】
本発明は、検査対象に放射線を照射して、断層撮影を行う放射線CT装置に関し、特に検査対象の試料を載置するテーブルが可動となっている放射線CT装置に関する。
【背景技術】
【0002】
工場などには、検査対象に放射線を照射して、断層撮影を行う放射線CT装置が配備されている。この放射線CT装置は、図20に示すように、放射線を照射する放射線源53と、検査対象の試料を載置するテーブル52と、放射線を検出する検出器54とを備えている。水平に置かれたテーブル52の下側に放射線源53が設けられており、テーブル52の上側に検出器54が設けられている(例えば特許文献1参照)。
【0003】
検出器54は、テーブル52と平行な平面に属する仮想円に沿って移動できるようになっており、テーブル52は、テーブル52に備えられたXYステージにより、鉛直方向と直交するX方向、および鉛直方向・X方向に直交するY方向に移動する。
【0004】
検査対象の断層像は、まず検査対象の試料Wの放射線撮影を異なる方向から複数回行って、次に得られた複数の画像を再構成することで取得される。異なる方向から複数の撮影を行うには、試料Wに対する放射線源53および検出器54の位置を変更させながら複数の撮影を行う必要がある。従来の放射線CT装置では、放射線源53を固定する構成となっているものがある。このような装置では試料Wに対して放射線源53および検出器54を移動させる代わりに、放射線源53に対して検出器54,試料Wを移動させる構成となっている。
【0005】
したがって、異なる方向から試料Wの撮影を撮影を行う際には、検出器54を仮想円に沿って移動させると同期して試料Wが放射線源53に対して移動される。試料Wの移動はテーブル52をXYステージによりXおよびY方向に移動させることで実現される。断層画像撮影中の検出器54およびテーブル52の放射線源53に対する移動は、厳密に規定された円運動となっている。
【0006】
このテーブル52の移動が正確でないと鮮明な断層画像を取得することができない。断層画像撮影中のテーブル52の移動が規定の軌跡からずれると、テーブル52上の試料Wが撮影中に移動したのと同様に取得される断層画像がボケてしまう。従来構成では、この様な断層画像のボケの原因となるテーブル52の位置ズレを防止する目的で、テーブル52を駆動させるXYステージにリニアエンコーダを配備し、テーブル52の移動を正確に行えるようにしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−106515号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来の放射線CT装置においては、次のような問題点がある。
すなわち、従来の放射線CT装置においては、高倍率の断層画像において、鮮明な画像を取得することができない。
【0009】
断層撮影を行う際に、僅かでもテーブル52の移動が規定の軌跡からずれると、検出器54に投影される試料Wの放射線像の位置が本来の位置から大きくずれてしまう。放射線源53は放射線を放射状に照射するので、テーブル52に載置された試料Wの像は、拡大されて検出器54に投影される。したがって、テーブル52上の試料Wの位置ズレも拡大されて検出器54上に現れてしまう。これがテーブル52の移動の僅かなズレにより放射線像が大きくずらされる理由である。
【0010】
このような放射線像のズレは、特に高倍率の断層画像を取得しようとする時に問題となる。高倍率の断層画像においてはテーブル52の位置ズレの影響が相対的に大きいからである。
【0011】
従来の放射線CT装置においては、高倍率の断層画像を鮮明に得ることができない。テーブル52を駆動するXYステージの移動量の精度に限界があるからである。
【0012】
本発明は、この様な事情に鑑みてなされたものであって、その目的は、試料を放射線源に対して正確に移動することができなくても、鮮明な高倍率断層画像を取得することができる放射線CT装置を提供することにある。
【課題を解決するための手段】
【0013】
本発明は上述の課題を解決するために次のような構成をとる。
すなわち、本発明に係る放射線CT装置は、マーカを有するウラ面とオモテ面とを備える試料載置用のテーブルと、放射線をテーブルに一方の面から照射する放射線源と、テーブルを放射線源に対して移動させるテーブル移動手段と、テーブル移動手段を制御するテーブル移動制御手段と、テーブルを透過してきた放射線を検出するテーブルの他方の面側に設けられた放射線検出器と、放射線検出器を放射線源に対して移動させる検出器移動手段と、検出器移動手段を制御する検出器移動制御手段と、放射線画像の撮影の度にテーブルのウラ面のマーカを可視光で撮影して検出信号を出力する光学カメラと、放射線検出器が出力した検出信号を基に、テーブルの載置位置に校正用の被写体を置いた状態で放射線源に対してテーブルおよび放射線検出器を移動させることにより撮影方向を変えながら被写体を次々と撮影するプレ撮影において一連のプレ放射線画像を生成するとともに、テーブルの載置位置に試料を置いた状態でテーブルおよび放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料を次々と撮影する実撮影において一連の実撮影放射線画像を生成する画像生成手段と、光学カメラが出力した検出信号を基に、プレ撮影においてマーカが写り込んだ一連のプレマーカ画像を生成するとともに、実撮影においてマーカが写り込んだ一連の実撮影マーカ画像を生成する光学画像生成手段と、実撮影マーカ画像とプレマーカ画像とによって、プレ撮影と実撮影との間で生じたテーブルの位置ズレを認識するとともに一連のプレ放射線画像によって撮影時のテーブルの移動の様式を認識して、一連の実撮影放射線画像を基に断層画像を再構成する再構成手段とを備えることを特徴とするものである。
【0014】
[作用・効果]本発明によれば、テーブルの載置位置に校正用の被写体を置いた状態で放射線源に対してテーブルおよび放射線検出器を移動させることにより撮影方向を変えながら被写体を次々と撮影するプレ撮影を行ったあと、テーブルおよび放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料を次々と撮影する実撮影を行って、一連のプレ放射線画像と一連の実撮影放射線画像とを基に断層画像を再構成する構成となっている。再構成手段は、実撮影に先立ってプレ放射線画像により撮影時のテーブルおよび放射線検出器の移動の様式を認識する。そして、一連の実撮影放射線画像とを基に断層画像を再構成すれば、実撮影放射線画像の撮影時におけるテーブルおよび放射線検出器の移動の様式を考慮することができるので、高解像度の断層画像を取得できる。
【0015】
しかし、この方法には難点がある。すなわち、テーブルがプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブルのウラ面にマーカを備えている。このマーカは、プレ撮影と実撮影の間、光学カメラによって撮影される。再構成手段は、断層画像を再構成する際に実撮影で得られた実撮影マーカ画像とプレ撮影で得られたプレマーカ画像とによってプレ撮影と実撮影との間で生じたテーブルの位置ズレを認識する。そして再構成手段は、この位置ズレを考慮して試料の断層画像を生成する。この様に構成すれば、例えプレ撮影と実撮影との間でテーブルの移動の様式が異なっていたとしても、再構成手段は実撮影におけるテーブルの位置を正確に知ることができる。結果として高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【0016】
また、上述の放射線CT装置において、一連のプレ放射線画像を基に放射線源に対するテーブルの位置を示す位置変数をプレ放射線画像毎に取得する位置変数取得手段と、実撮影マーカ画像とプレマーカ画像とを照合して、プレ撮影と実撮影におけるテーブルの位置ズレを示すズレ量を実撮影マーカ画像毎に取得するズレ量取得手段と、ズレ量を基に位置変数を補正して、実撮影における放射線源に対するテーブルの位置を示す補正位置変数を位置変数毎に取得する位置変数補正手段と、再構成手段が一連の実撮影放射線画像と補正位置変数とを用いて断層画像を再構成すればより望ましい。
【0017】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。すなわち、プレ撮影によりテーブルの移動の様子を示す位置変数を取得し、実撮影マーカ画像とプレマーカ画像とを照合して位置変数を補正して補正位置変数を取得し、再構成手段が補正位置変数を基に動作すれば、プレ撮影と実撮影との間でテーブルの移動の様式が異なっていたとしても、再構成手段は実撮影におけるテーブルの位置を考慮に入れて断層画像を生成することができる。
【0018】
また、上述の放射線CT装置において、テーブルのウラ面の全面にマーカが設けられていればより望ましい。
【0019】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。すなわち、テーブルのウラ面の全面にマーカが設けられていれば、テーブルがどのように移動しても光学カメラは、マーカを確実に撮影することができる。
【0020】
また、上述の放射線CT装置において、テーブルは、額縁状の周縁部材と周縁部材の内側に収容されるとともに周縁部材から着脱可能な中央板とを有し、周縁部材と中央板とには、互いの位置関係を示す印が付されており、光学カメラが中央板が周縁部材から外される前の時点と、中央板が周縁部材から外されて再び収容された後の時点で印を撮影して印画像が取得され、再構成手段が印画像を基に、中央板着脱の前後における周縁部材と中央板との位置変化を認識して試料の断層画像を再構成すればより望ましい。
【0021】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。放射線CT装置においてはメンテナンスの目的でテーブルを装置から外す場合がある。プレ撮影の後、実撮影の前にテーブルを装置から着脱させたとすると、実撮影マーカ画像とプレマーカ画像とを照合しても実撮影におけるテーブルの位置が正確に算出できなくなる。そこで、上述の構成では、テーブルの着脱の前後で、テーブルの位置がどの程度ずれたかを知ることができるようにしている。すなわち、テーブルを着脱可能な中央板と着脱不可能な周縁部材とで構成し、中央板の着脱の前後で中央板が周縁部材からどの程度移動したかを知ることができるようにしている。この様にすることで、プレ撮影の後、実撮影の前に中央板の着脱があったとしても、実撮影におけるテーブルの位置が正確に算出できるようになる。
【0022】
また、上述の放射線CT装置において、試料を載置する試料載置板がテーブルのオモテ面側に設けられており、試料載置板をテーブルに対して移動させる試料載置板移動手段と、試料の断層画像を撮影するに先立って試料載置板移動手段を制御することにより、試料の撮影部分をテーブルにおける校正用の被写体が載置された位置に移動させることを可能とする試料載置板移動制御手段を備えればより望ましい。
【0023】
[作用・効果]上述の構成は、本発明の放射線CT装置の具体的な構成を示すものとなっている。テーブルの移動の様式は、テーブルのどの部分で断層画像を撮影するかで異なっている。そこで、上述の構成によれば、試料の撮影部分をテーブルにおける校正用の被写体が載置された位置に移動させる構成を備えている。この様に構成することにより、高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【発明の効果】
【0024】
本発明によれば、テーブルの載置位置の被写体を撮影するプレ撮影を行ったあと、テーブルおよび放射線検出器をプレ撮影と同じ様式で移動させて試料を撮影する実撮影を行って断層画像を再構成する構成となっている。再構成手段は、実撮影放射線画像の撮影時におけるテーブルおよび放射線検出器の移動の様式を考慮することができる。しかし、この方法には難点がある。すなわち、テーブルがプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブルのウラ面のマーカを撮影し、プレマーカ画像とによってプレ撮影と実撮影との間で生じたテーブルの位置ズレを認識する。結果として高解像度の断層画像を取得可能な放射線CT装置が提供できる。
【図面の簡単な説明】
【0025】
【図1】実施例1に係るX線CT装置の構成を説明する機能ブロック図である。
【図2】実施例1に係るテーブルのウラ面を説明する平面図である。
【図3】実施例1に係るテーブルと検出器の移動を説明する斜視図である。
【図4】実施例1に係るテーブルの移動を説明する平面図である。
【図5】実施例1に係るマーカ画像を説明する模式図である。
【図6】実施例1に係るファントムを説明する斜視図である。
【図7】実施例1に係るプレ撮影について説明する模式図である。
【図8】実施例1に係る実撮影について説明する模式図である。
【図9】実施例1に係るマーカ画像を説明する模式図である。
【図10】実施例1に係る位置変数の補正動作を説明する模式図である。
【図11】実施例1に係るX線CT装置の動作を説明するフローチャートである。
【図12】実施例2に係るX線CT装置の構成を説明する機能ブロック図である。
【図13】実施例2に係る試料載置板移動機構の構成を説明する平面図である。
【図14】実施例2に係るX線CT装置の構成を説明する模式図である。
【図15】実施例2に係るX線CT装置の構成を説明する模式図である。
【図16】実施例2に係るX線CT装置の構成を説明する模式図である。
【図17】本発明の1変形例を説明する斜視図である。
【図18】本発明の1変形例を説明する平面図である。
【図19】本発明の1変形例を説明する模式図である。
【図20】従来の構成を説明する模式図である。
【発明を実施するための形態】
【0026】
以降、本発明の各実施例を説明する。各実施例におけるX線は、本発明の放射線に相当する。
【実施例1】
【0027】
<X線CT装置の全体構成>
図1は、実施例1に係るX線CT装置の全体構成を示している。X線CT装置は、図1に示すように、試料Wを載置するテーブル2と、テーブル2の下側に設けられたX線を照射するX線発生装置1と、テーブル2の上側に設けられたX線を検出する検出器3と、テーブル2の下側に設けられた光学カメラ7とを備えている。
【0028】
テーブル2は、作業室の床面に平行な矩形となっている。テーブル2の各辺は、縦方向(Y方向),横方向(X方向)のいずれかに伸びている。テーブル2は、試料Wを載置するオモテ面とこの反対側の面であるウラ面を有している。テーブル2のオモテ面は、検出器3に面しており、ウラ面は、X線発生装置1および光学カメラ7に面している。テーブル2の具体的は大きさは例えば50×50cmである。X方向、Y方向、および鉛直方向は互いに直交する。
【0029】
図2は、テーブル2のウラ面を表した平面図である。テーブル2のウラ面の全面にマーカmがY方向およびX方向に沿って2次元マトリックス状に配列されている。このマーカmは、テーブル2のウラ面を撮影する光学カメラ7によって撮影される。
【0030】
検出器3は、X線発生装置1から発せられ、テーブル2を透過してきたX線を入射させ、X線を検出する。検出器3は、具体的にはイメージインテンシファイアが用いられる。
【0031】
XY移動機構6(XYステージ)は、テーブル2をX線発生装置1に対してX方向、およびY方向に移動させる目的で設けられている。XY移動機構6の移動により、テーブル2は、矩形となっているテーブル2を延長する平面上を移動することになる。XY移動制御部16bは、XY移動機構6を制御する目的で設けられている。また、検出器移動機構5は、検出器3をX線発生装置1に対して回転移動させる目的で設けられている。検出器移動制御部16aは、検出器移動機構5を制御する目的で設けられている。
【0032】
X線CT装置は、テーブル2に載置された試料Wを撮影方向を変えながら複数回に亘ってX線撮影をし、得られた画像を再構成することで断層画像を取得する。したがって、X線CT装置は、X線発生装置1および検出器3が撮影中に試料Wに対して移動するようになっている。実際は、検出器3およびテーブル2の試料WがX線発生装置1に対して移動することで試料Wの撮影方向の変更が行われる。
【0033】
図3は、X線CT装置が断層画像を撮影するときのテーブル2および検出器3の移動の様子を表している。断層画像を撮影する場合には、図3に示すように、検出器3がX線発生装置1から鉛直方向に伸びる中心軸を中心に回転移動される。このとき、中心軸に対する検出器3の向きは固定されていて、中心軸に対向している検出器3の一辺は常に同一である。この回転移動は、検出器移動機構5が実現する。また、この検出器3の回転移動に同期してテーブル2もX線発生装置1から鉛直方向に伸びる中心軸を中心に回転移動される。この回転移動は、XY移動機構6が実現する。図1及び図3では、検出器3の検出面の中心に立てた法線が鉛直方向(検出器の面が水平)になっているが、検出器3の検出面の中心に立てた法線がX線発生装置1のX線発生点に向くように配置してもよい。
【0034】
図4は、断層画像を撮影する際のテーブル2の回転移動を説明している。図4に示すようにXY移動機構6は、テーブル2の4辺がX方向またはY方向に平行となっている状態を保った状態でテーブル2の各頂点が弧を描くようにテーブル2を回転移動させる。
【0035】
光学カメラ7は、テーブル2のウラ面を可視光で撮影して検出信号を出力する。テーブル2のウラ面には十分な点数のマーカmが設けられており、テーブル2のウラ面を撮影する光学カメラ7の視野には必ずマーカmが写り込むようになっている。例えテーブル2がX線発生装置1に対して回転移動したとしても、光学カメラ7の視野にはテーブル2に設けられたマーカmのいずれかが常に写り込んでいる。
【0036】
光学カメラ7がテーブル2のウラ面を撮影すると、検出信号を光学画像生成部12に出力する。光学画像生成部12は、この検出信号を基にマーカmが写り込んだマーカ画像を生成する。マーカ画像は図5に示すように複数のマーカmを写し込んだものとなっている。
【0037】
画像生成部8は、検出器3が出力した検出信号を基に被写体の透視像が写り込んだX線画像を生成する。再構成部10は、画像生成部8が生成した複数枚のX線画像を基に断層画像を再構成する。
【0038】
X線制御部11は、X線発生装置1のX線照射の制御を行う目的で設けられている。操作卓17は、操作者の指示をX線CT装置に入力させる目的で設けられている。表示部18は、撮影された断層画像が表示されるものである。記憶部9は、マーカ画像等の断層画像撮影に必要な情報の一切を記憶する。また、主制御部27は、各制御部を統括的に制御する目的で設けられている。この主制御部27はCPUによって構成され、各種のプログラムを実行することにより各制御部11,16a,16bおよび各部8,10,12,21,22,24を実現している。また、上述の各部は、それらを担当する演算装置に分割されて実行されても良い。位置変数取得部21,位置変数補正部22,ズレ量取得部24の動作については後述のものとする。
【0039】
<位置変数の意味>
本発明のX線CT装置は、解像度の高い断層画像を取得する目的で、位置変数の概念を用いている。断層画像の撮影が開始されると、テーブル2と検出器3とが回転移動しながら複数枚の透視画像が取得される。この透視画像の各々は、テーブル2の位置が互いに異なる状態で撮影されたものとなっている。位置変数は、透視画像の間でテーブル2の位置が具体的にどのように異なるのかを示す変数となっている。本発明においては、テーブル2と検出器3とが1回転する間に100枚の透視画像が生成されるので、位置変数はこの100枚の透視画像の各々について取得されることになる。ただし、以下の説明では100枚の透視像から断層像を再構成する例で説明しているが、何枚の断層像を使用するかは操作者が任意に決めればよいことであり、本発明が100枚に限定されるものではない。
【0040】
位置変数は、具体的には互いに独立した5個程度のパラメータを備えたデータセットとなっている。連写された100枚の透視画像のうち、2枚の異なる透視画像についての位置変数を比較すると、一方の透視画像を撮影したときのテーブル2の位置が、他方の透視画像を撮影したときのテーブル2の位置からどの方向にどの程度だけ異なるかが分かるようになっている。
【0041】
本発明は、100枚のX線画像を再構成して断層画像を生成する構成となっている。この際、位置変数は、100枚のX線画像を取得する毎に求められる。X線画像に対応する位置変数により、このX線画像を撮影したときの被写体の撮影方向が正確に割り出せる。この正確な撮影方向を考慮に入れて断層画像を生成するようにすれば、より解像度の高い断層像を取得することができる。
【0042】
一般的に良く用いられる断層画像の生成方法は、位置変数を取得しない。すなわち、この方法は、テーブル2および検出器3をそれぞれ回転させながら被写体を撮影して100枚の透視画像を取得し、この透視画像を基に断層画像を生成するというものである。この方法では、テーブル2および検出器3を正円に沿って回転するように制御しているから、各々の透視画像が幾何学計算により求められる所定の方向から撮影されたものであるとして断層画像の再構成を行う。
【0043】
しかし、実際には、移動機構の精度の問題から、テーブル2および検出器3は、完全に正円に沿って回転されるわけではない。一般的な方法では、これを無視して断層画像を再構成することになる。したがって、この方法では、被写体の実際の撮影方向が理想の方向からずれているにもかかわらず、理想の撮影方向で被写体を撮影したとして断層画像を再構成してしまう。すると、高解像度の断層像が取得できない。
【0044】
本発明では、この点、位置変数を取得して実際の撮影方向を各々の透視画像で割り出して再構成を行うようにしているので、高解像度の断層画像が取得できる。この実際の撮影方向の割り出しに必要な位置変数は、テーブル2に試料Wの代わりに校正用のファントムを置いた状態で試料の撮影と同様の動作で校正用ファントムを撮影して取得した100枚の透視画像を基に生成される。つまり、本発明では校正用ファントムの撮影により予め位置変数を取得しておいて、その後、実際の試料Wをテーブル2に置いて100枚の透視画像を撮影する。試料Wの断層画像は、試料Wの撮影(実撮影)で得られた透視画像と、校正用ファントムの撮影(プレ撮影)で得られた位置変数とを基に生成される。
【0045】
実撮影における試料Wの撮影方向を知るには、本来は実撮影時のテーブル2の位置情報を用いなければならない。しかし、テーブル2の位置を示す位置変数は、形状が予め分かっている校正用ファントムを撮影しなければ取得できない。したがって、本発明のX線CT装置は、実撮影時におけるテーブル2の位置情報の代わりにプレ撮影で取得された位置変数を断層画像の再構成に用いる構成となっている。
【0046】
ここで問題となるのが、テーブル2の回転移動の再現性である。実撮影におけるテーブル2の移動の様子は、プレ撮影の時とほとんど同じであると考えられるが、実際には僅かにずれる。このズレの補償は本発明の最も特徴的な部分であり、後述のものとする。
【0047】
<位置変数の算出>
位置変数の算出方法について説明する。位置変数を算出するには、図6に示すような2つの球体を有するファントムが用いられる。この球体の大きさと球体同士の距離は既知のものである。テーブル2に図6のファントムを置いてプレ撮影が行われる。すると、画像生成部8は、2つの球体を様々な方向から撮影した100枚の透視画像を生成する。この透視画像をプレX線画像Pと呼ぶことにする。
【0048】
生成されたプレX線画像Pは、位置変数取得部21に送出される。位置変数取得部21は、プレX線画像Pの各々に写り込んだ2の球体の透視像を基にテーブル2の位置および傾斜角度を3次元的に認識する。位置変数取得部21は、これらのテーブル2の位置情報を位置変数として算出する。この位置情報の取得は、プレX線画像P毎に行われる。
【0049】
プレ撮影と実撮影との間でテーブル2の移動の様式が完全に一致していれば、プレ撮影で取得した位置情報と100枚の実撮影X線画像Qとで高解像度の断層画像が取得できる。しかし、実際には、プレ撮影と実撮影との間でテーブル2の移動の軌跡は僅かに異なる。本発明はこのズレを補償する目的でマーカmとこれを撮影する光学カメラ7とが設けられている。
【0050】
<プレ撮影におけるマーカ画像の撮影>
プレ撮影において、光学カメラ7は、プレX線画像Pが撮影される度に、テーブル2のウラ面を撮影する。すると図5で説明したようなプレマーカ画像MがプレX線画像Pの枚数と同じ100枚だけ取得される。
【0051】
図7は、プレ撮影終了後に記憶部9に記憶されるプレ撮影で取得されたデータテーブルを表している。プレX線画像Pの撮影は、100回に亘って行われ、プレX線画像Pの各々を基に取得された位置変数(α,β,γ……)が記憶部9に記憶される。記憶部9は、光学カメラ7が撮影したプレマーカ画像Mを位置変数(α,β,γ……)と関連づけて記憶する。図7においてn回目のプレX線画像Pで取得された位置変数をαn,βn,γn……で表し、このプレX線画像Pを撮影したときに得られたプレマーカ画像をMnで表している。
【0052】
このプレマーカ画像Mは、プレ撮影と実撮影との間で起こるテーブル2の位置ズレを示す指標となっている。すなわち、実撮影においてプレ撮影と同様にマーカ画像の撮影を行ってみて、プレマーカ画像Mと実撮影における実撮影マーカ画像Nとを比較すれば、プレ撮影と実撮影との間でテーブル2の位置ズレの程度を知ることができる。
【0053】
<実撮影におけるマーカ画像の撮影>
試料Wをテーブル2に置いた状態で実行される実撮影においても、X線CT装置は、プレ撮影と同様の動作をする。プレ撮影と異なる点は、テーブル2に置かれた物体がファントムから試料Wに変化している点のみである。
【0054】
実撮影においては、テーブル2に校正用のファントムの代わりに試料Wを置いた状態でプレ撮影と同様の動作で試料Wを撮影して100枚の実撮影X線画像Qを取得する。このとき光学カメラ7は、実撮影X線画像Qが撮影される度に、テーブル2のウラ面を撮影する。すると図5で説明したような実撮影マーカ画像Nが実撮影X線画像Qの枚数と同じ100枚だけ取得される。つまり、X線CT装置は、一連のプレ撮影において、n回目の撮影におけるX線発生装置1に対するテーブル2と検出器3との位置関係は、一連の実撮影において、n回目の撮影におけるX線発生装置1に対するテーブル2と検出器3との位置関係と一致するように動作する。しかし、機械的精度の問題から、各位置関係はプレ撮影と実撮影との間で僅かにずれてしまう。
【0055】
図8は、実撮影終了後に記憶部9に記憶される実撮影で取得されたデータテーブルを表している。実撮影X線画像Qの撮影は、100回に亘って行われ、実撮影X線画像Qの各々が記憶部9に記憶される。記憶部9は、光学カメラ7が撮影した実撮影マーカ画像Nを実撮影X線画像Qと関連づけて記憶する。図8においてn回目の実撮影X線画像をQnで表し、実撮影X線画像Qnを撮影したときに得られた実撮影マーカ画像をNnで表している。
【0056】
図9は、プレ撮影においてn回目に取得されたプレマーカ画像Mnと実撮影においてn回目に取得された実撮影マーカ画像Nnとを重ね合わせて表示している。プレマーカ画像Mnに写り込んでいるマーカは、図9において破線で示している。同様に、実撮影マーカ画像Nnに写り込んでいるマーカは、図9において実線で示している。図9において実線のマーカと破線のマーカとが完全に重ならないということは、プレ撮影のn回目の撮影におけるテーブル2の位置と、実撮影のn回目の撮影におけるテーブル2の位置とが互いに異なっていることになる。とはいえ、プレ撮影と実撮影との間でテーブル2は同じ運動をするように動作されるので、マーカ画像上におけるマーカの位置ズレは、プレマーカ画像Mn上のマーカが実撮影マーカ画像Nn上のどのマーカに対応するかが判別できる程度に僅かである。
【0057】
マーカ画像M,Nを用いたテーブル2の位置ズレの補償の方法について説明する。光学画像生成部12が生成したプレマーカ画像Mおよび実撮影マーカ画像Nは、ズレ量取得部24に送出される。ズレ量取得部24は、マーカ画像M,Nを基にズレ量を取得する。ズレ量は、プレ撮影と実撮影との間で起こるテーブル2の位置ズレ量を示すものとなっている。
【0058】
ズレ量取得部24は、プレマーカ画像Mおよび実撮影マーカ画像Nの相関を取得する。すると、マーカ画像M,Nにおけるマーカの位置のズレを表すベクトル(ズレ量)が取得できる。図10の実線の矢印は、ズレ量取得部24のマーカ画像M,Nの照合によりマーカ画像M,Nに写り込んだマーカのズレ量が取得される様子を表している。図10では、ズレ量取得部24は、3回目の撮影に係るマーカ画像Mn,Nnとから、3回目の撮影に係るズレ量(x3,y3)を取得している。このようにズレ量取得部24は、プレ撮影と実撮影の間にテーブル2が同じ移動をすることにより、テーブル2がX線発生装置1に対して同じ位置となっている時に撮影されたマーカ画像M,N同士を照合してズレ量を取得する。このズレ量の取得は、100枚の実撮影マーカ画像Nごとに行われる。
【0059】
ズレ量取得部24が取得したズレ量は、位置変数補正部22に送出される。位置変数補正部22は、ズレ量を基にプレ撮影で得られた位置変数を補正して、実撮影におけるX線発生装置1に対するテーブル2の位置を取得する。図10の破線で示す矢印は、位置変数補正部22の位置変数およびズレ量の照合により位置変数が補正される様子を表している。図10では、位置変数補正部22は、3回目の撮影に係る位置変数(α3,β3,γ3)と3回目の撮影に係るズレ量(x3,y3)とから、3回目の撮影に係る補正位置変数(a3,b3,c3)を取得している。このように位置変数補正部22は、n回目の撮影に係る位置変数(αn,βn,γn)とn回目の撮影に係るズレ量(xn,yn)とから、n回目の撮影に係る補正位置変数(an,bn,cn)を取得する。この補正は、100の位置変数ごとに行われる。
【0060】
この様にして取得された補正位置変数は、実撮影におけるテーブル2の位置を正確に示すものとなっている。補正位置変数は、プレ撮影で得られた位置変数をプレ撮影と実撮影との間で起こるテーブル2の位置ズレ量で補正することで取得したものだからである。
【0061】
<X線CT装置の動作>
次に、図11を参照して、X線CT装置の動作について説明する。なお、この動作において、ファントムを用いた校正は、試料Wの断層画像の撮影の度に行われるものとする。
【0062】
X線CT装置の動作としては、図11に示すように、まず、ファントムがテーブル2に載置され(ファントム載置ステップS1),操作者が操作卓17を操作してプレ撮影を開始させる(プレ撮影ステップS2)。そしてプレ撮影で得られたX線画像からテーブル2の位置を示す位置変数が取得され(位置変数取得ステップS3),試料Wがテーブル2に載置される(試料載置ステップS4)。続いて、操作者が操作卓17を操作して実撮影を開始させ(実撮影ステップS5),マーカ画像M,Nにより取得されたズレ量を基に位置変数の補正が行われる(位置変数補正ステップS6)。最後に実撮影で得られたX線画像と補正位置変数とを基に試料Wの断層画像が取得される(再構成ステップS7)。以降これらの各ステップについて順を追って説明する。
【0063】
<ファントム載置ステップS1,プレ撮影ステップS2>
まず、図6で説明したファントムがテーブル2のオモテ面の載置位置に載置される。操作者が操作卓17を操作してプレ撮影の開始の指示をX線CT装置に与えると、テーブル2および検出器3の回転移動が開始されるとともに、X線制御部11の制御によりX線発生装置1からX線が間歇的に照射される。こうして、ファントムを撮影するプレ撮影が行われる。
【0064】
X線発生装置1から照射されたX線は、ファントムを透過して検出器3で検出される。画像生成部8は、検出器3が出力した検出信号を基に、撮影方向を変えながらファントムを写し込んだ一連のプレX線画像Pを100枚生成する。
【0065】
光学カメラ7は、プレX線画像Pが撮影される度にテーブル2のウラ面を可視光で撮影する。光学画像生成部12は、光学カメラ7が出力した検出信号を基に、テーブル2のウラ面のマーカmを写し込んだ一連のプレマーカ画像Mを100枚生成する。
【0066】
<位置変数取得ステップS3>
プレX線画像Pは、位置変数取得部21に送出される。位置変数取得部21は、一連のプレX線画像Pを基にX線発生装置1に対するテーブル2の位置を示す位置変数(α,β,γ……)をプレX線画像P毎に取得する。位置変数(α,β,γ……)およびプレマーカ画像Mは、プレ撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0067】
<試料載置ステップS4,実撮影ステップS5>
プレ撮影の終了後、操作者は、ファントムをテーブル2から除去して、テーブル2におけるファントムが載置されていた載置位置と同じ位置に試料Wを載置する。この試料Wは断層画像を取得する必要のある実際の撮影対象である。操作者が操作卓17を操作して実撮影の開始の指示をX線CT装置に与え得ると、テーブル2および検出器3の回転移動が開始されるとともに、X線制御部11の制御によりX線発生装置1からX線が間歇的に照射される。こうして、試料Wを撮影する実撮影が行われる。このときのテーブル2および検出器3の移動の様式は、プレ撮影と同じ様式となっている。
【0068】
X線発生装置1から照射されたX線は、試料Wを透過して検出器3で検出される。画像生成部8は、検出器3が出力した検出信号を基に、撮影方向を変えながら試料Wを写し込んだ一連の実撮影X線画像Qを100枚生成する。光学カメラ7は、実撮影X線画像Qが撮影される度にテーブル2のウラ面を可視光で撮影する。光学画像生成部12は、光学カメラ7が出力した検出信号を基に、テーブル2のウラ面のマーカmを写し込んだ一連の実撮影マーカ画像Nを100枚生成する。実撮影X線画像Qおよび実撮影マーカ画像Nは、実撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0069】
<位置変数補正ステップS6>
実撮影の終了後、ズレ量取得部24は、記憶部9に記憶されたプレマーカ画像Mと実撮影マーカ画像Nとを撮影回数毎に照合して、プレ撮影と実撮影におけるテーブル2の位置ズレを示すズレ量(x,y)を取得する。ズレ量(x,y)は、プレ撮影および実撮影における撮影回数と関連づけされて記憶部9で記憶される。
【0070】
位置変数補正部22は、記憶部9に記憶されたズレ量(x,y)と位置変数(α,β,γ……)とを読み出して、ズレ量(x,y)を基に位置変数(α,β,γ……)を撮影回数毎に補正して、実撮影におけるX線発生装置1に対するテーブル2の位置を示す補正位置変数(a,b,c……)を取得する。
【0071】
<再構成ステップS7>
補正位置変数(a,b,c……)は、再構成部10に送られる。再構成部10は、補正位置変数(a,b,c……)により実撮影における試料Wの撮影方向を撮影回数毎に認識する。そして、再構成部10は、記憶部9に記憶された一連の実撮影X線画像Qを読み出して、一連の実撮影X線画像Qと補正位置変数(a,b,c……)とを用いて断層画像を再構成する。つまり、再構成部10は、プレマーカ画像Mと実撮影マーカ画像Nとによって、プレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識するとともに、一連のプレX線画像Pによって撮影時のテーブル2の移動の様式を認識して、一連の実撮影X線画像Qとを基に断層画像を再構成することになる。生成された断層画像が表示部18に表示されてX線CT装置の動作は終了となる。
【0072】
以上のように、本発明によれば、テーブル2の載置位置に校正用のファントムを置いた状態でX線発生装置1に対してテーブル2および検出器3を移動させることにより撮影方向を変えながらファントムを次々と撮影するプレ撮影を行ったあと、テーブル2および検出器3をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら試料Wを次々と撮影する実撮影を行って、一連のプレX線画像Pと一連の実撮影X線画像Qとを基に断層画像を再構成する構成となっている。再構成部10は、実撮影に先立ってプレX線画像Pにより撮影時のテーブル2および検出器3の移動の様式を認識する。そして、一連の実撮影X線画像Qとを基に断層画像を再構成すれば、実撮影X線画像Qの撮影時におけるテーブル2および検出器3の移動の様式を考慮することができるので、高解像度の断層画像を取得できる。
【0073】
しかし、この方法には難点がある。すなわち、テーブル2がプレ撮影と実撮影で全く同じように移動するとは限らないのである。そこで、本発明によれば、テーブル2のウラ面にマーカmを備えている。このマーカmは、プレ撮影と実撮影の間、光学カメラによって撮影される。再構成部10は、断層画像を再構成する際に実撮影で得られた実撮影マーカ画像Nとプレ撮影で得られたプレマーカ画像Mとによってプレ撮影と実撮影との間で生じたテーブル2の位置ズレを認識する。そして再構成部10は、この位置ズレを考慮して試料Wの断層画像を生成する。この様に構成すれば、例えプレ撮影と実撮影との間でテーブル2の移動の様式が異なっていたとしても、再構成部10は実撮影におけるテーブル2の位置を正確に知ることができる。結果として高解像度の断層画像を取得可能なX線CT装置が提供できる。
【0074】
上述の構成は、プレ撮影によりテーブル2の移動の様子を示す位置変数(α,β,γ……)を取得し、実撮影マーカ画像Nとプレマーカ画像Mとを照合して位置変数(α,β,γ……)を補正して補正位置変数(a,b,c……)を取得し、再構成部10が補正位置変数(a,b,c……)を基に動作する。すると、プレ撮影と実撮影との間でテーブル2の移動の様式が異なっていたとしても、再構成部10は実撮影におけるテーブル2の位置を考慮に入れて断層画像を生成することができる。
【0075】
上述のようにテーブル2のウラ面には、マーカmが2次元マトリックス状に配列されていれば、テーブル2がどのように移動しても光学カメラは、マーカmを確実に撮影することができる。
【実施例2】
【0076】
次に、実施例2に係るX線CT装置の構成について説明する。実施例2に係るX線CT装置は、実施例1で説明したX線CT装置の構成とほぼ同様である。異なる点は、テーブル2のオモテ面に試料載置用の試料載置板2pを備えている点である。実施例2においては、ファントムおよび試料Wは試料載置板2pに置かれるのであり、テーブル2のオモテ面には置かれない。試料載置板2pは、矩形となっているテーブル2に倣って矩形となっており、例えばアルミシートから構成されている。
【0077】
図12は、実施例2に係るX線CT装置の機能ブロック図を表している。図12においては、図1で説明した検出器移動機構5,XY移動機構6,画像生成部8,記憶部9,再構成部10,X線制御部11,光学画像生成部12,検出器移動制御部16a,XY移動制御部16b,操作卓17,表示部18,位置変数取得部21,位置変数補正部22,およびズレ量取得部24については省略をしている。
【0078】
実施例2における独自の構成について説明する。試料載置板移動機構6pは、試料載置板2pをテーブル2に対して移動させる目的で設けられており、試料載置板移動制御部16cは、試料載置板移動機構6pを制御する目的で設けられている。試料載置板移動制御部16cは、主制御部27により統括的に制御される。
【0079】
図13は、試料載置板移動機構6pの具体的な構成を示している。試料載置板移動機構6pは、テーブル2の1頂点に設けられた基部6p1を有している。基部6p1は、テーブル2の側辺に倣ったL形状となっている。基部6p1を構成するアームのそれぞれには、試料載置板2pをX方向に移動させるモータ6p3および押ネジ6p4と、試料載置板2pをY方向に移動させるモータ6p5および押ネジ6p6とを備えている。押ネジ6p4はX方向に伸びており、押ネジ6p6は、Y方向に伸びている。
【0080】
試料載置板移動機構6pは、試料載置板2pにおいて基部6p1に最も隣接した1頂点と、基部6p1のアームの結合部における試料載置板2p側の1頂点とを架橋する位置にバネ6p7を有している。このバネは、試料載置板2pに引張力を付与することにより試料載置板2pを基部6p1に対して移動させる目的で設けられている。
【0081】
<実施例1の構成からの改良点>
実施例1の構成では、まずテーブル2の上にファントムを置いてプレ撮影をする。そして、実撮影を行う際には、テーブル2におけるファントムを置いていた載置位置と同じ位置に試料Wを置くことになる。このように実施例1の構成では、ファントムを置く位置と試料Wを置く位置とを一致させなければならないという制約がある。
【0082】
この制約が生じる理由について説明する。図14は、テーブル2における異なる位置p,qを示している。図14におけるpの位置にファントムを置いてプレ撮影をする場合、試料Wを必ずpの位置に置いて実撮影をしなければならない。仮に、pの位置でプレ撮影をしたにも関わらず試料Wをqの位置に置いて実撮影をしたとすると、取得される断層画像がボケてしまう。
【0083】
図15は、pの位置にファントムを置いて撮影を行ったときと、qの位置にファントムを置いて撮影を行ったときとで、テーブル2の位置ズレがどのようになるかを示している。グラフの横軸は、テーブル2の回転角度を意味しており、グラフの縦軸は正円運動を基準としたテーブル2の位置ズレを意味している。テーブル2が仮に完全に正円運動をしたとすると、位置ズレは常に0となる。しかし、実際は、機械的精度の問題からテーブル2の運動は図15に示すように正円運動から僅かにずれる。
【0084】
図15の上側の図における実線のグラフは、pの位置を載置位置としてプレ撮影をしたときのテーブル2における正円運動基準の位置ズレである。そして、図15の上側の図における破線のグラフは、pの位置を載置位置として実撮影をしたときのテーブル2における正円運動基準の位置ズレである。実線と破線とを比較すると分かるように、プレ撮影と実撮影とにおけるテーブル2の運動は完全には一致しないまでも、ほぼ近似している。
【0085】
一方、図15の下側の図における実線のグラフは、qの位置を載置位置としてプレ撮影をしたときのテーブル2の位置ズレである。ここで、図15の上側の図の実線のグラフと図15の下側の図の実線のグラフとは互いに近似してはいない。つまり、テーブル2は、どの部分を試料Wの載置位置とするかで回転移動の様式が異なるのである。
【0086】
このようになるのは、テーブル2を駆動させるXY移動機構6の構造に原因がある。XY移動機構6はX方向に伸びたアームとY方向に伸びたアームとを有している。このアームがスライドして移動することでテーブル2の移動が実現される。テーブル2を正円運動させようとしてもテーブル2の移動が理想どおりとならずにガタつくのは、テーブル2を駆動させるアームの表面が理想通りに平坦となっていないことによる。
【0087】
いまここで、テーブル2のpの位置を載置位置としてテーブル2を2回転させたとする。すなわち、ファントムと試料Wとがテーブル2の同じ位置に置かれた場合である。このとき、XY移動機構6は、1回転目と2回転目とでアームの同じ部分を使ってテーブル2を回転させることになる。すると、テーブル2の運動の再現性が高くなる。テーブル2の正円運動を乱すアームの起伏は、1回転目と2回転目で同じだからである。
【0088】
しかし、テーブル2のpの位置を載置位置としてテーブル2を1回転させ、テーブル2のqの位置を載置位置としてテーブル2を1回転させると状況が異なる(図14参照)。すなわち、ファントムと試料Wとがテーブル2の異なる位置に置かれた場合である。この場合、XY移動機構6は、1回転目と2回転目とでアームの異なる部分を使ってテーブル2を回転させることになる。
【0089】
XY移動機構6が有するアームは、その位置に応じて表面の微細な起伏の様子が異なっている。したがって、1回転目と2回転目とでアームの異なる部分を使ってテーブル2が回転されると、テーブル2の正円運動を乱すアームの起伏は、テーブル2回転させる毎に異なることになる。したがって、テーブル2を2回転させるときの運動の再現性は低いものとなる。
【0090】
ところで、実施例1の構成によれば、マーカ画像M,Nを取得することで、テーブル2を2回転させたときの移動様式の多少な変化を補償できるようになってはいる。しかし、テーブル2が1回転目と2回転目とであまりに移動様式が違いすぎると、マーカ画像M,Nを用いた位置変数の補正が不可能となる。すなわち、マーカmの像の位置がプレマーカ画像Mと実撮影マーカ画像Nとの間で違いすぎると、マーカmがどのように移動したかが判別できなくなってしまうのである。マーカmは、テーブル2のウラ面に2次元マトリックス状に配置されており、プレマーカ画像Mに写り込んだマーカが実撮影マーカ画像N上のマーカのどれに対応するかが分からなくなるからである。
【0091】
つまり、実施例1の構成によれば、断層画像を取得するには、断層画像取得した物体が置かれた位置でプレ撮影をしておく必要がある。大きな試料Wの一部の断層画像を取得しようとするときに、試料Wにおける断層画像を取得したい部分が変わる度にプレ撮影を行うのは煩雑である。
【0092】
この様な問題点を解決する目的で、実施例2の構成では、テーブル2において断層撮影をする位置を限定している。具体的には、図16に示すように、テーブル2を縦横に5等分する線分を格子状に配列したときに、線分同士が互いに交わる16個の交点を試料Wの載置位置とする。実施例2の構成では、これら16個の交点上にファントムを載置して、16通りのプレ撮影を行っておく。そして、実撮影を行う際には、試料Wにおける断層画像の取得が必要な撮影部分をテーブル2上の16個の交点のうちのいずれかまで移動させる。この様にすることで、プレ撮影のときと実撮影のときとでテーブル2の回転移動は確実に近似したものとなる。
【0093】
実施例2におけるXY移動機構6は、テーブル2の移動の様子をズレ量取得部24および位置変数補正部22に送出している。これにより、ズレ量取得部24および位置変数補正部22は、動作の際、テーブル2における16個の交点のうちのいずれかを選択して撮影が行われたかを認識することができる。そして、実撮影の際、ズレ量取得部24および位置変数補正部22は、16通りあるプレ撮影で得られたデータから、実撮影において選択された交点の位置と同じ位置で取得されたデータを選択して動作する。
【0094】
実施例2におけるX線CT装置においては、試料Wとして基板を想定している。基板の一部を拡大した断層画像を生成したい場合、基板における撮影部分をテーブル2における交点の位置まで移動させなければならない。この移動を実行するのが、試料載置板移動機構6pである。試料載置板移動機構6pによる試料Wの移動は、試料Wの断層画像を撮影するに先立って行われる。
【0095】
この様に構成すれば、実施例1の場合と異なり、断層画像撮影の度にプレ撮影を行う必要がない。したがって、実施例2の構成においては、16通りのプレ撮影をしておけば、しばらくは実撮影を連続して行っても高解像度の断層画像が取得できる。
【0096】
以上のように、実施例2の構成は、本発明のX線CT装置の具体的な構成を示すものとなっている。テーブル2の移動の様式は、テーブル2のどの部分で断層画像を撮影するかで異なっている。そこで、上述の構成によれば、試料Wの撮影部分をテーブル2における校正用のファントムが載置された位置に移動させる構成を備えている。この様に構成することにより、高解像度の断層画像を取得可能なX線CT装置が提供できる。
【0097】
本発明は、上述の構成に限られず、下記のように変形実施することができる。
【0098】
(1)上述の実施例1のテーブル2の構成を図17のように構成してもよい。本変形例によれば、図17に示すように、テーブル2は、額縁状の周縁部材2aと、周縁部材2aの内側に収容される中央板2bとを有している。中央板2bは、周縁部材2aの内穴にはめ込まれる構成となっており、周縁部材2aから着脱可能となっている。中央板2bは、気温の変化により伸縮しにくいカーボンで構成される。本変形例においては、試料Wは、中央板2bに載置される。
【0099】
中央板2bを周縁部材2aから除去すると、テーブル2の下側に設けられているX線発生装置1および光学カメラ7が露出する。X線発生装置1および光学カメラ7のメンテナンスを行うときは、この中央板2bを周縁部材2aから脱着すれば便利である。また、周縁部材2aは、XY移動機構6に固定され、周縁部材2aとXY移動機構6との位置関係はずれることがない。
【0100】
図18は、テーブル2のウラ面を示している。中央板2bには、図2で説明したマーカmが記されているが、図18ではこれを省略している。周縁部材2aと中央板2bとには、互いの位置関係を示す印が記されている。図14においては、矩形となっている周縁部材2aの三隅にA,B,Cを摸した印がされ、矩形となっている中央板2bの三隅にもA,B,Cを摸した印がされている。そして、周縁部材2aおよび中央板2bに付される各印は、同じ印が互いに向き合う位置に配置される。従って、周縁部材2aおよび中央板2bのそれぞれに付されたAの印の位置関係を知れば、Aの印が設けられた角における周縁部材2aおよび中央板2bの位置関係の変化を知ることができる。B,Cの印は、Aの印と同様に周縁部材2aおよび中央板2bの位置関係の変化を知る指標となっている。
【0101】
光学カメラ7は、中央板2bが周縁部材2aから外される前の時点と、中央板2bが周縁部材2aから外されて再び収容された後の時点で印を撮影して印画像を取得する。この印画像には、A,B,Cの印が2つずつ写り込んでいる。印画像は、光学カメラ7が送出した検出信号を光学画像生成部12が生成したものである。
【0102】
再構成部10は、この印画像を基に中央板2b着脱の前後における周縁部材2aと中央板2bとの位置変化を認識して断層画像を再構成する。具体的には、位置変数補正部22は、位置変数(α,β,γ……)を補正する際にマーカ画像M,Nから得られたズレ量のみならず印画像から得られた周縁部材2aに対する中央板2bの位置ズレをも考慮して補正を行う。
【0103】
このように補正することにより、プレ撮影の後、実撮影をする前に中央板2bの着脱があっても、周縁部材2aと中央板2bとの位置ズレにより断層画像がボケることがない。
【0104】
X線CT装置においてはメンテナンスの目的でテーブル2を装置から外す場合がある。プレ撮影の後、実撮影の前にテーブル2を装置から着脱させたとすると、実撮影マーカ画像Nとプレマーカ画像Mとを照合しても実撮影におけるテーブル2の位置が正確に算出できなくなる。そこで、上述の構成では、テーブル2の着脱の前後で、テーブル2の位置がどの程度ずれたかを知ることができるようにしている。すなわち、テーブル2を着脱可能な中央板2bと着脱不可能な周縁部材2aとで構成し、中央板2bの着脱の前後で中央板2bが周縁部材2aからどの程度移動したかを知ることができるようにしている。この様にすることで、プレ撮影の後、実撮影の前に中央板2bの着脱があったとしても、実撮影におけるテーブル2の位置が正確に算出できるようになる。
【0105】
(2)上述の各実施例ではX線発生装置1および光学カメラ7がテーブル2の下側に設けられており、検出器3がテーブル2の上側に設けられた構成であったが、本発明はこの様な構成に限られない。すなわち図19に示すように、検出器3および光学カメラ7がテーブル2の下側に設けられており、X線発生装置1がテーブル2の上側に設けられた構成としてもよい。この様な構成においてもテーブル2の試料を載置する面はオモテ面であり、オモテ面とは反対側のウラ面には、マーカmが設けられている。
【符号の説明】
【0106】
m マーカ
M プレマーカ画像
N 実撮影マーカ画像
1 X線発生装置(放射線源)
2 テーブル
2a 周縁部材
2b 中央板
2p 試料載置板
3 検出器(放射線検出器)
5 検出器移動機構(検出器移動手段)
6 XY移動機構(テーブル移動手段)
7 光学カメラ
8 画像生成部(画像生成手段)
12 光学画像生成部(光学画像生成手段)
16a 検出器移動制御部(検出器移動制御手段)
16b XY移動制御部(テーブル移動制御手段)
16c 試料載置板移動制御部(試料載置板移動制御手段)
22 位置変数補正部(位置変数補正手段)
24 ズレ量取得部(ズレ量取得手段)
【特許請求の範囲】
【請求項1】
マーカを有するウラ面とオモテ面とを備える試料載置用のテーブルと、
放射線を前記テーブルに一方の面から照射する放射線源と、
前記テーブルを前記放射線源に対して移動させるテーブル移動手段と、
前記テーブル移動手段を制御するテーブル移動制御手段と、
前記テーブルを透過してきた放射線を検出する前記テーブルの他方の面側に設けられた放射線検出器と、
前記放射線検出器を前記放射線源に対して移動させる検出器移動手段と、
前記検出器移動手段を制御する検出器移動制御手段と、
放射線画像の撮影の度に前記テーブルの前記ウラ面のマーカを可視光で撮影して検出信号を出力する光学カメラと、
前記放射線検出器が出力した検出信号を基に、前記テーブルの載置位置に校正用の被写体を置いた状態で前記放射線源に対して前記テーブルおよび前記放射線検出器を移動させることにより撮影方向を変えながら前記被写体を次々と撮影するプレ撮影において一連のプレ放射線画像を生成するとともに、前記テーブルの前記載置位置に試料を置いた状態で前記テーブルおよび前記放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら前記試料を次々と撮影する実撮影において一連の実撮影放射線画像を生成する画像生成手段と、
前記光学カメラが出力した検出信号を基に、プレ撮影においてマーカが写り込んだ一連のプレマーカ画像を生成するとともに、実撮影においてマーカが写り込んだ一連の実撮影マーカ画像を生成する光学画像生成手段と、
前記実撮影マーカ画像と前記プレマーカ画像とによって、プレ撮影と実撮影との間で生じた前記テーブルの位置ズレを認識するとともに一連のプレ放射線画像によって撮影時のテーブルの移動の様式を認識して、一連の実撮影放射線画像を基に断層画像を再構成する再構成手段とを備えることを特徴とする放射線CT装置。
【請求項2】
請求項1に記載の放射線CT装置において、
一連のプレ放射線画像を基に前記放射線源に対する前記テーブルの位置を示す位置変数をプレ放射線画像毎に取得する位置変数取得手段と、
前記実撮影マーカ画像と前記プレマーカ画像とを照合して、プレ撮影と実撮影における前記テーブルの位置ズレを示すズレ量を実撮影マーカ画像毎に取得するズレ量取得手段と、
前記ズレ量を基に前記位置変数を補正して、実撮影における前記放射線源に対する前記テーブルの位置を示す補正位置変数を位置変数毎に取得する位置変数補正手段と、
前記再構成手段が一連の実撮影放射線画像と前記補正位置変数とを用いて断層画像を再構成することを特徴とする放射線CT装置。
【請求項3】
請求項1または請求項2に記載の放射線CT装置において、
前記テーブルの前記ウラ面の全面に前記マーカが設けられていることを特徴とする放射線CT装置。
【請求項4】
請求項1ないし請求項3のいずれかに記載の放射線CT装置において、
前記テーブルは、額縁状の周縁部材と前記周縁部材の内側に収容されるとともに前記周縁部材から着脱可能な中央板とを有し、
前記周縁部材と前記中央板とには、互いの位置関係を示す印が付されており、
前記光学カメラが前記中央板が前記周縁部材から外される前の時点と、前記中央板が前記周縁部材から外されて再び収容された後の時点で前記印を撮影して印画像が取得され、
前記再構成手段が前記印画像を基に、中央板着脱の前後における前記周縁部材と前記中央板との位置変化を認識して前記試料の断層画像を再構成することを特徴とする放射線CT装置。
【請求項5】
請求項1ないし請求項3のいずれかに記載の放射線CT装置において、
前記試料を載置する試料載置板が前記テーブルのオモテ面側に設けられており、
前記試料載置板を前記テーブルに対して移動させる試料載置板移動手段と、
前記試料の断層画像を撮影するに先立って試料載置板移動手段を制御することにより、前記試料の撮影部分を前記テーブルにおける校正用の前記被写体が載置された位置に移動させることを可能とする試料載置板移動制御手段を備えることを特徴とする放射線CT装置。
【請求項1】
マーカを有するウラ面とオモテ面とを備える試料載置用のテーブルと、
放射線を前記テーブルに一方の面から照射する放射線源と、
前記テーブルを前記放射線源に対して移動させるテーブル移動手段と、
前記テーブル移動手段を制御するテーブル移動制御手段と、
前記テーブルを透過してきた放射線を検出する前記テーブルの他方の面側に設けられた放射線検出器と、
前記放射線検出器を前記放射線源に対して移動させる検出器移動手段と、
前記検出器移動手段を制御する検出器移動制御手段と、
放射線画像の撮影の度に前記テーブルの前記ウラ面のマーカを可視光で撮影して検出信号を出力する光学カメラと、
前記放射線検出器が出力した検出信号を基に、前記テーブルの載置位置に校正用の被写体を置いた状態で前記放射線源に対して前記テーブルおよび前記放射線検出器を移動させることにより撮影方向を変えながら前記被写体を次々と撮影するプレ撮影において一連のプレ放射線画像を生成するとともに、前記テーブルの前記載置位置に試料を置いた状態で前記テーブルおよび前記放射線検出器をプレ撮影と同じ様式で移動させることにより撮影方向を変えながら前記試料を次々と撮影する実撮影において一連の実撮影放射線画像を生成する画像生成手段と、
前記光学カメラが出力した検出信号を基に、プレ撮影においてマーカが写り込んだ一連のプレマーカ画像を生成するとともに、実撮影においてマーカが写り込んだ一連の実撮影マーカ画像を生成する光学画像生成手段と、
前記実撮影マーカ画像と前記プレマーカ画像とによって、プレ撮影と実撮影との間で生じた前記テーブルの位置ズレを認識するとともに一連のプレ放射線画像によって撮影時のテーブルの移動の様式を認識して、一連の実撮影放射線画像を基に断層画像を再構成する再構成手段とを備えることを特徴とする放射線CT装置。
【請求項2】
請求項1に記載の放射線CT装置において、
一連のプレ放射線画像を基に前記放射線源に対する前記テーブルの位置を示す位置変数をプレ放射線画像毎に取得する位置変数取得手段と、
前記実撮影マーカ画像と前記プレマーカ画像とを照合して、プレ撮影と実撮影における前記テーブルの位置ズレを示すズレ量を実撮影マーカ画像毎に取得するズレ量取得手段と、
前記ズレ量を基に前記位置変数を補正して、実撮影における前記放射線源に対する前記テーブルの位置を示す補正位置変数を位置変数毎に取得する位置変数補正手段と、
前記再構成手段が一連の実撮影放射線画像と前記補正位置変数とを用いて断層画像を再構成することを特徴とする放射線CT装置。
【請求項3】
請求項1または請求項2に記載の放射線CT装置において、
前記テーブルの前記ウラ面の全面に前記マーカが設けられていることを特徴とする放射線CT装置。
【請求項4】
請求項1ないし請求項3のいずれかに記載の放射線CT装置において、
前記テーブルは、額縁状の周縁部材と前記周縁部材の内側に収容されるとともに前記周縁部材から着脱可能な中央板とを有し、
前記周縁部材と前記中央板とには、互いの位置関係を示す印が付されており、
前記光学カメラが前記中央板が前記周縁部材から外される前の時点と、前記中央板が前記周縁部材から外されて再び収容された後の時点で前記印を撮影して印画像が取得され、
前記再構成手段が前記印画像を基に、中央板着脱の前後における前記周縁部材と前記中央板との位置変化を認識して前記試料の断層画像を再構成することを特徴とする放射線CT装置。
【請求項5】
請求項1ないし請求項3のいずれかに記載の放射線CT装置において、
前記試料を載置する試料載置板が前記テーブルのオモテ面側に設けられており、
前記試料載置板を前記テーブルに対して移動させる試料載置板移動手段と、
前記試料の断層画像を撮影するに先立って試料載置板移動手段を制御することにより、前記試料の撮影部分を前記テーブルにおける校正用の前記被写体が載置された位置に移動させることを可能とする試料載置板移動制御手段を備えることを特徴とする放射線CT装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−15426(P2013−15426A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−148773(P2011−148773)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]