
自動分析装置

【課題】一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することができる自動分析装置を提供する。
【解決手段】同じ平面上において、検体を収容する検体容器の移送経路をなす第1の円と検体と試薬とを反応させる反応容器の移送経路をなす第4の円の交点P1と、試薬を収容する試薬容器または精度管理用検体を収容する精度管理用検体容器の移送経路をなす第2の円と前記第4の円の交点P2との距離を、試薬を収容する第2の試薬容器の移送経路をなす第3の円と前記第4の円の交点P3と前述した交点P2との距離と等しくする。
【解決手段】同じ平面上において、検体を収容する検体容器の移送経路をなす第1の円と検体と試薬とを反応させる反応容器の移送経路をなす第4の円の交点P1と、試薬を収容する試薬容器または精度管理用検体を収容する精度管理用検体容器の移送経路をなす第2の円と前記第4の円の交点P2との距離を、試薬を収容する第2の試薬容器の移送経路をなす第3の円と前記第4の円の交点P3と前述した交点P2との距離と等しくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検体と試薬とを反応させ、この反応の結果を光学的に測定することによって検体の成分を分析する自動分析装置に関する。
【背景技術】
【0002】
従来、検体と試薬とを反応させ、この反応の結果を光学的に測定することによって検体の成分を分析する自動分析装置においては、様々な種類の精度管理用検体を用いた各種精度管理を定期的に行っている。精度管理用検体を自動分析装置で保管する場合には、精度管理用検体の劣化や変性を防止するために、自動分析装置が精度管理用検体を一定の温度で保冷する機能を有している必要がある。この点に鑑みて、従来の自動分析装置は、精度管理用検体を収容する容器を、一般の検体を収容する容器とは別の場所で保持する保冷機能付き容器ホルダを備えている(例えば、特許文献1を参照)。このような従来技術によれば、精度管理用検体を適切な状態に保つことができるだけでなく、一般の検体と精度管理用検体との混同を防止する効果を得ることもできる。
【0003】
【特許文献1】特開2000−258431号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来技術では、一般の検体と精度管理用検体とを別な場所で保管するために多くのスペースが必要であり、装置の小型化を実現する上での障害となっていた。
【0005】
また、上述した従来技術では、一般の検体の分析と精度管理用検体の分析とを異なる制御のもとで行わなければならないため、分析に要する時間を短縮することが難しいという問題もあった。
【0006】
本発明は、上記に鑑みてなされたものであって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することができる自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明に係る自動分析装置は、分析対象の検体と試薬とを反応させ、この反応の結果を光学的に測定することによって前記分析対象の検体の成分を分析する自動分析装置であって、検体を収容する検体容器を第1の円の円周に沿って移送可能に複数個並べて保持する検体容器ホルダと、試薬を収容する試薬容器および精度管理用検体を収容する精度管理用検体容器を、前記第1の円と同心で前記第1の円と径が異なる第2の円の円周に沿って移送可能に複数個ずつ並べて保持する多種液体容器ホルダと、試薬を収容する第2の試薬容器を、前記第1および第2の円と同心で前記第1および第2の円の各々と径が異なる第3の円の円周に沿って移送可能に複数個並べて保持する試薬容器ホルダと、前記検体容器ホルダ、前記多種液体容器ホルダおよび前記試薬容器ホルダよりも下方に位置し、検体と試薬とを反応させる反応容器を、前記第1乃至第3の円とともに所定の平面へ射影したとき前記第1乃至第3の円とそれぞれ交わる第4の円の円周に沿って移送可能に複数個並べて保持する反応容器ホルダと、前記平面上における前記第1の円と前記第4の円の交点に位置する前記検体容器から直下に位置する前記反応容器へ検体を吐出する検体分注手段と、前記平面上における前記第2の円と前記第4の円の交点に位置する前記試薬容器または前記精度管理用検体容器から直下に位置する前記反応容器へ前記試薬容器が収容する試薬または前記精度管理用検体容器が収容する精度管理用検体を吐出する多種液体分注手段と、前記平面上における前記第3の円と前記第4の円の交点に位置する前記第2の試薬容器から直下に位置する前記反応容器へ試薬を吐出する試薬分注手段と、前記試薬容器が収容する試薬、前記精度管理用検体容器が収容する精度管理用検体および前記第2の試薬容器が収容する試薬を一定温度で保冷する保冷手段と、を備え、前記平面上において、前記第1の円と前記第4の円の交点と前記第2の円と前記第4の円の交点との距離の最小値は、前記第2の円と前記第4の円の交点と前記第3の円と前記第4の円の交点との距離の最小値と等しいことを特徴とする。
【0008】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際、前記多種液体分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、精度管理用検体の成分を分析する際、前記試薬分注手段は、前記第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする。
【0009】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする。
【0010】
また、本発明に係る自動分析装置は、上記発明において、精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0011】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0012】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際、前記試薬分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、精度管理用検体の成分を分析する際、前記多種液体分注手段は、前記第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする。
【0013】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする。
【0014】
また、本発明に係る自動分析装置は、上記発明において、精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0015】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0016】
また、本発明に係る自動分析装置は、上記発明において、検体の成分の分析と精度管理用検体の分析とを並行して行うことを特徴とする。
【発明の効果】
【0017】
本発明によれば、一般の検体の移送経路の内周側に精度管理用検体の移送経路が位置するようにするとともに、試薬の移送経路も一般の検体や精度管理用検体の各移送経路と同心をなすように設定し、さらに一部の試薬の移送経路が精度管理用検体の移送経路と重なるように設定し、試薬と精度管理用検体とを一括して保冷する構造を有しているため、精度管理用検体のホルダを別に設けることなく、一般の検体と精度管理用検体との混同を防止することができる。また、検体と試薬とが一つの円形領域の中に納まる構成を有し、その下方に反応容器が立体的に配置されているため、省スペース化を図ることができる。加えて、一般の検体の分注位置と精度管理用検体の分注位置との距離を、各種検体の分注位置とその検体に対応した試薬の分注位置との距離と等しくすることにより、一般の検体の分析動作と精度管理用検体の分析動作とを同じ制御のもとで行うことができる。したがって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することが可能となる。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して、本発明を実施するための最良の形態(以後、「実施の形態」と称する)を説明する。なお、以下の説明で参照する図面はあくまでも模式的なものであって、同じ物体を異なる図面で示す場合には、寸法や縮尺等が異なる場合もある。
【0019】
(実施の形態1)
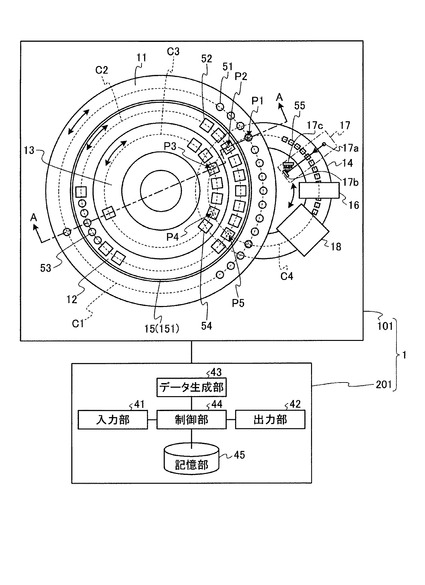
図1は、本発明の実施の形態1に係る自動分析装置の要部の構成を模式的に示す図である。同図に示す自動分析装置1は、分析対象である血液や体液等の検体(試料)とその検体の検査項目に応じた試薬との反応の結果を光学的に測定する測定ユニット101と、測定ユニット101を含む自動分析装置1の制御を行うとともに測定ユニット101における測定結果の分析を行うデータ処理ユニット201とを有し、これら二つのユニットが連携することによって複数の検体の生化学的な分析を自動的かつ連続的に行う装置である。なお、ここでいう「液体」には、微量の固体成分を含有する液体も含まれる。
【0020】
測定ユニット101は、緊急検体を含む一般の検体を収容する検体容器51を複数個保持する検体容器ホルダ11と、検査項目に応じた試薬を収容する試薬容器52を複数個保持するとともに、精度管理用検体を収容する検体容器53(精度管理用検体容器)を複数個保持する多種液体容器ホルダ12と、多種液体容器ホルダ12の内周側に位置し、検査項目に応じた試薬を収容する試薬容器54(第2の試薬容器)を複数個保持する試薬容器ホルダ13と、検体と試薬とを反応させる反応容器55を複数個保持する反応容器ホルダ14と、多種液体容器ホルダ12および試薬容器ホルダ13を含む領域を一定の温度で保冷する保冷手段としての保冷庫15と、反応容器ホルダ14が保持する反応容器55の内部の液体を攪拌する攪拌部16と、反応容器ホルダ14が保持する反応容器55へ光を照射し、この照射した光のうち反応容器55を透過した光を光学的に測定する測光部17と、反応容器ホルダ14が保持する反応容器55の洗浄を行う反応容器洗浄部18と、を備える。
【0021】
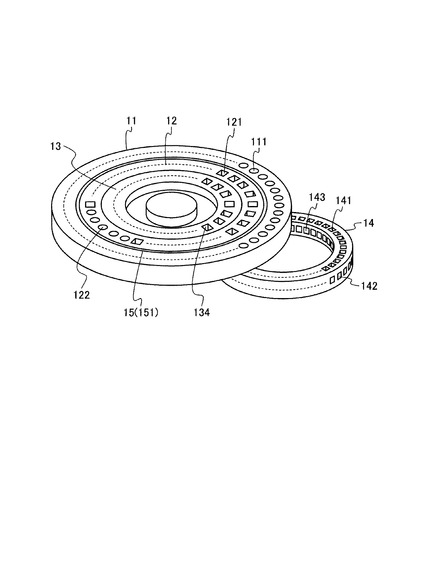
図2は、検体容器ホルダ11、多種液体容器ホルダ12、試薬容器ホルダ13、反応容器ホルダ14の各構成および相互の位置関係を示す斜視図である。また、図3は、測定ユニット101の要部の概略構成を示す模式図であり、図1のA−A線に沿った部分断面図に検体や試薬を分注する機構を加えた模式図である。
【0022】
検体容器ホルダ11は、固定軸19を回転中心として回転可能であり、検体容器51を保持し、底面側の径が小さい保持部111を、検体容器51の移送軌跡をなす第1の円C1の円周に沿って複数個備える。
【0023】
検体容器ホルダ11の外周面と自動分析装置1の本体との間には軸受20が設けられ、検体容器ホルダ11の底面にはギア21が設けられている。ギア21に対しては、ホルダ駆動部22が駆動力を伝達する。ホルダ駆動部22は、例えばモータと、このモータの駆動力を伝達し、ギア21と噛合可能なギアとを用いて実現される。
【0024】
保持部111が保持する検体容器51は、有底の中空円筒形状をなして検体Spを収容する本体部511と、本体部511の底面から突出する突出部512と、本体部511が収容する検体Spに対して吐出圧を発生するピストン513と、本体部511の底面から突出部512まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル514と、を有し、保持部111に嵌合可能な形状をなしている。
【0025】
ピストン513は、ピストン駆動部23の駆動によって進退動作を行う。ピストン513の移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン513が下方へ所定量移動すると、その移動量に相当する検体Spが、ノズル514を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン513、ノズル514およびピストン駆動部23が、検体を分注する検体分注手段の少なくとも一部の機能を具備している。
【0026】
ピストン駆動部23は、第1の円C1と反応容器ホルダ14の移送軌跡をなす第4の円C4との同一平面上での交点P1の位置にのみ設けられる。換言すれば、ピストン駆動部23は、交点P1の位置で静止している検体容器51のピストン513のみを駆動することができる。
【0027】
多種液体容器ホルダ12は、固定軸19を回転中心として回転可能であり、試薬容器52を保持する保持部121と、検体容器53を保持する保持部122とを有する。保持部121および122は、第1の円C1と同心で第1の円C1よりも径が小さく、試薬容器52および検体容器53の移送軌跡をなす第2の円C2の円周に沿って複数個ずつ設けられている。
【0028】
多種液体容器ホルダ12の外周面と保冷庫15との間には軸受24が設けられ、多種液体容器ホルダ12の底面にはギア25が設けられている。ギア25に対しては、ホルダ駆動部26が駆動力を伝達する。ホルダ駆動部26は、上述したホルダ駆動部22と同様、モータと、このモータの駆動力を伝達し、ギア25と噛合可能なギアとを用いて実現される。
【0029】
保持部121が保持する試薬容器52は、有底の中空円筒形状をなして試薬Rgを収容する本体部521と、本体部521の底面から突出する突出部522と、本体部521が収容する試薬Rgに対して吐出圧を発生するピストン523と、本体部521の底面から突出部522まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル524と、を有し、保持部121に嵌合可能な形状をなしている。ノズル524の下端の高さは、検体容器51が有するノズル514の下端の高さとほぼ同じであることが望ましい。
【0030】
また、保持部122が保持する検体容器53は、有底の中空円筒形状をなして精度管理用検体QCを収容する本体部531と、本体部531の底面から突出する突出部532と、本体部531が収容する精度管理用検体QCに対して吐出圧を発生するピストン533と、本体部531の底面から突出部532まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル534と、を有し、保持部122に嵌合可能な形状をなしている。ノズル534の下端の高さは、検体容器51が有するノズル514の下端の高さや、試薬容器52が有するノズル524の下端の高さとほぼ同じであることが望ましい。
【0031】
ピストン523および533は、ピストン駆動部27の駆動によって進退動作を行う。ピストン523および533の各移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン523が下方へ所定量移動すると、その移動量に相当する試薬Rgが、ノズル524を介して直下に位置する反応容器55へ吐出される。またピストン533が下方へ所定量移動すると、その移動量に相当する精度管理用検体QCが、ノズル534を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン523、ノズル524、ピストン533、ノズル534およびピストン駆動部27が、試薬または精度管理用検体を分注する多種液体分注手段の少なくとも一部の機能を具備している。
【0032】
ピストン駆動部27は、第2の円C2と第4の円C4との同一平面上での交点P2およびP5の位置にのみ設けられる。換言すれば、ピストン駆動部27は、交点P2またはP5で静止している試薬容器52のピストン523または検体容器53のピストン533のみを駆動することができる。
【0033】
精度管理用検体QCは、検体に含まれる成分の濃度が既知であるような検体であり、例えば検量線作成用の検体などである。
【0034】
試薬容器ホルダ13は、固定軸19を回転中心として回転可能であり、複数の試薬容器54を保持する。試薬容器ホルダ13は、複数の試薬容器54を、第2の円C2と同心であって第2の円C2よりも径が小さい第3の円C3の円周に沿って並べて保持する容器載置部131と、容器載置部131を支持する円盤部132と、円盤部132の中心部に設けられ、固定軸19を回転中心として回転可能な円筒部133と、を有する。容器載置部131は、試薬容器54を保持する保持部134を、第3の円C3の円周に沿って複数個備える。円筒部133の内周面と固定軸19の外周面との間には軸受28が設けられており、円筒部133の底面にはギア29が設けられている。ギア29に対しては、ホルダ駆動部30が駆動力を伝達する。ホルダ駆動部30は、上述したホルダ駆動部22と同様、モータと、このモータの駆動力を伝達し、ギア29と噛合可能なギアとを用いて実現される。
【0035】
保持部134が保持する試薬容器54は、有底の中空角柱形状をなして試薬Rgを収容し、保持部134に嵌合可能な形状をなす本体部541と、本体部541の底面から突出する突出部542と、本体部541が収容する試薬Rgに対して吐出圧を発生するピストン543と、本体部541の底面から突出部542まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル544と、を有する。ノズル544の下端の高さは、検体容器51が有するノズル514の下端の高さ、試薬容器52が有するノズル524の下端の高さ、検体容器53が有するノズル534の下端の高さとほぼ同じであることが望ましい。なお、試薬容器ホルダ13の形状によっては、試薬容器52を容器載置部131へ載置することも可能である。
【0036】
ピストン543は、ピストン駆動部31の駆動によって進退動作を行う。ピストン543の移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン543が下方へ所定量移動すると、その移動量に相当する試薬Rgが、ノズル544を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン543、ノズル544およびピストン駆動部31が、試薬を分注する試薬分注手段の少なくとも一部の機能を具備している。
【0037】
ピストン駆動部31は、第3の円C3と第4の円C4との交点P3とP4にのみ設けられる。換言すれば、ピストン駆動部31は、交点P3およびP4で静止している試薬容器54のピストン543のみを駆動することができる。
【0038】
本実施の形態1では、多種液体容器ホルダ12および試薬容器ホルダ13が検体容器ホルダ11よりも内周側に設けられている。このため、一般の検体を収容する検体容器51と精度管理用検体を収容する検体容器53とを混同する恐れはない。また、試薬容器52、54や検体容器53よりも交換の頻度が高い検体容器51が外周側に位置するため、容器の交換も行いやすく、交換の際に検体と試薬との間のコンタミネーションを生じる恐れがない。さらに、多種液体容器ホルダ12および試薬容器ホルダ13が検体容器ホルダ11の内周側に位置しているため、試薬や精度管理用検体を保冷する保冷庫15を設置しやすい。
【0039】
反応容器ホルダ14は、有底の中空角柱形状をなし、透明な材料を用いて形成される反応容器55を保持する保持部141を複数個備える。保持部141は、反応容器55の移送軌跡をなす第4の円C4の円周に沿って設けられている。第4の円C4は、第1の円C1、第2の円C2および第3の円C3を所定の平面(例えば図1の面)へ射影したとき第1の円C1、第2の円C2および第3の円C3とそれぞれ交わる。反応容器ホルダ14は、ホルダ駆動部32の駆動によって第4の円C4の円周方向に回転可能である。
【0040】
反応容器ホルダ14の外側面および内側面には、測光部17が反応容器55へ照射する光を透過させるための窓142および143がそれぞれ設けられている。また、反応容器ホルダ14は、保持部141が保持する反応容器55の内部の温度を37℃程度に保つための恒温槽(図示せず)を有する。
【0041】
保冷庫15は、試薬容器52、54、検体容器53を囲むように設けられ、試薬容器52、54、検体容器53がそれぞれ収容する試薬や精度管理用検体の劣化や変性を抑えるため、試薬や精度管理用検体を一定温度で保冷する機能を有する。保冷庫15は、多種液体容器ホルダ12および試薬容器ホルダ13を収容するホルダ収容部151と、ホルダ収容部151の上方に開閉可能に設けられる蓋部152と、ホルダ収容部151と蓋部152とによって囲まれた内部領域を冷却する冷却器153と、保冷庫15の内部の温度を測定する温度センサ154と有する。
【0042】
ホルダ収容部151は、中心に開口部を有し、固定軸19および試薬容器ホルダ13の円筒部133が貫通している第1部材151aと、第1部材151aの外周に配置される円環状の第2部材151bと、第2部材151bの外周に配置され、試薬容器ホルダ13の外縁部を底面から側面にかけて包囲する第3部材151cとを備える。第1部材151aと第2部材151bとの境界には、ノズル544を外部へ表出するための細い円形の隙間が設けられている。第2部材151bと第3部材151cとの境界には、ノズル524やノズル534を外部へ表出するための細い円形の隙間が設けられている。
【0043】
蓋部152のうち、多種液体容器ホルダ12が保持する試薬容器52が収容する試薬または検体容器53が収容する精度管理用検体を分注する位置P2およびP5の上方には、ピストン駆動部27がピストン523または533を駆動するための開口部152aがそれぞれ設けられている。また、蓋部152のうち、試薬容器ホルダ13が保持する試薬容器54が収容する試薬を分注する位置P3およびP4の上方には、ピストン駆動部31がピストン543を駆動するための開口部152bがそれぞれ設けられている。
【0044】
測光部17は、白色光を照射する光源17aと、光源17aが照射した白色光のうち、反応容器55を透過してきた白色光を分光する分光光学系17bと、分光光学系17bで分光した光を成分ごとに受光して電気信号に変換する受光素子17cとを有する。
【0045】
反応容器洗浄部18は、一つの反応容器55に対して、反応液の吸引、洗剤の吐出および吸引、洗浄液の吐出および吸引、乾燥の各処理を順次行う。反応容器洗浄部18が使用する洗浄液は、例えばイオン交換水である。
【0046】
なお、図1では、攪拌部16、測光部17、反応容器洗浄部18の相互の位置関係は必ずしも正確ではない。これらの正確な位置関係は、各種容器ホルダの回転態様や分注動作などの条件に応じて適宜定められる。
【0047】
次に、データ処理ユニット201の構成を説明する。データ処理ユニット201は、図1に示すように、キーボードやマウスなどを有し、検体の分析に必要な情報や自動分析装置1の動作指示信号などを含む情報等の入力を受ける入力部41と、液晶等のディスプレイ装置やプリンタを有し、検体の分析に関する情報等を出力する出力部42と、測定ユニット101における測定結果に基づいて検体の分析データを生成するデータ生成部43と、自動分析装置1の制御を行う制御部44と、測定ユニット101の測定結果に基づいた演算結果を含む各種情報を記憶する記憶部45と、を備え、CPU,ROM,RAM等を具備したコンピュータによって実現される。
【0048】
データ生成部43は、測定ユニット101の測光部17から受信した測定結果の分析演算を行う。この分析演算では、測光部17から送られてくる測定結果に基づいて反応容器55内部の液体の吸光度を算出したり、吸光度の算出結果と検量線や分析パラメータ等の各種情報とを用いて反応容器55内部の液体の成分を定量的に求めたりすることにより、検体ごとの分析データを生成する。
【0049】
記憶部45は、データ生成部43が生成した分析データのほか、検査項目、検体情報、試薬の種類、検体や試薬の分注量、検体や試薬の有効期限、分析に使用する検量線に関する情報、分析に必要なパラメータなどを記憶する。
【0050】
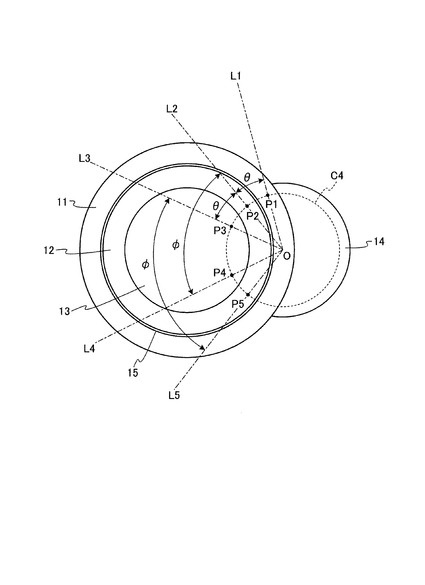
図4は、以上の構成を有する自動分析装置1が各種検体や試薬を分注する分注位置P1〜P5の相互の位置関係を示す図である。同図に示す直線Ln(n=1,2,3,4,5)は、第4の円C4の中心Oおよび分注位置Pnを通過する直線である。図4において、直線L1と直線L2のなす角度は、直線L2と直線L3のなす角度に等しく、その大きさはθである。換言すると、図4に示す平面上で、分注位置P1と分注位置P2との距離(第1の円C1と第4の円C4の交点と第2の円C2と第4の円C4の交点との距離の最小値)は、分注位置P2と分注位置P3との距離(第2の円C2と第4の円C4の交点と第3の円C3と第4の円C4の交点との距離の最小値)に等しい。また、直線L2と直線L4のなす角度は、直線L3と直線L5のなす角度に等しく、その大きさはφである。
【0051】
自動分析装置1の分注位置P1〜P5が上述した位置関係を有することにより、一般の検体と精度管理用検体とを同じ制御のもとで分析することが可能となる。以下、一般の検体の測定シーケンスと精度管理用検体の測定シーケンスとが同じ制御のもとで実行可能であることを具体的に説明する。
【0052】
まず、自動分析装置1が行う一般の検体の測定シーケンスの例を説明する。検体容器ホルダ11は、反応容器55へ吐出する検体を収容する検体容器51を分注位置P1へ配置する回転動作を行う。その後、反応容器ホルダ14が回転することによって空の反応容器55が分注位置P1に達すると、その上方に位置する検体容器51がノズル514を介して所定量の検体を吐出する。反応容器ホルダ14は、例えば図1や図4で反時計回りに1周+1ポジション分の回転を行って静止し、各種液体を吐出するのに必要な時間が経過した後、前述した回転動作を繰り返す。
【0053】
反応容器ホルダ14が上述した回転動作を繰り返し行い、検体が吐出された反応容器55が分注位置P2に達すると、その上方に位置する試薬容器52がノズル524を介し、検査項目に応じて検体と最初に反応させる第1試薬を吐出する。この吐出動作に先立って、多種液体容器ホルダ12は、反応容器55へ吐出する第1試薬を収容する試薬容器52を分注位置P2へ配置する回転動作を行っている。試薬容器52を分注位置P2へ配置する際には、多種液体容器ホルダ12を分注位置P2までの距離が近い方向へ回転させるようにすればより好ましい。
【0054】
第1試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1試薬との混合液を攪拌する。
【0055】
測光部17は、検体と第1試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201では、データ生成部43が、受信した測定結果に基づいた分析演算を行う。その後、出力部42は、分析演算によって得られた分析データを出力する一方、記憶部45は、その分析データを格納して記憶する。
【0056】
続いて、反応容器55が反応容器ホルダ14の回転動作によって分注位置P4に達すると、その上方に位置する試薬容器54がノズル544を介し、検査項目に応じて検体と2番目に反応させる第2試薬を吐出する。この吐出動作に先立って、試薬容器ホルダ13は、反応容器55へ吐出する第2試薬を収容する試薬容器54を分注位置P4へ配置する回転動作を行っている。
【0057】
第2試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1および第2試薬との混合液を攪拌する。
【0058】
測光部17は、検体と第1および第2試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0059】
反応容器洗浄部18は、測光部17による測定が終了した反応容器55を洗浄する。これにより、一般の検体を分析する場合の測定シーケンスが終了する。
【0060】
なお、測光部17は、反応容器ホルダ14が回転する際、光源17aの光路を通過する全ての反応容器55に対する測定を行っている。このため、1回の測定シーケンスの間、測光部17は反応容器55に対して上記以外のタイミングでも測定を行う。データ処理ユニット201は、測光部17から送られてくる測定結果のうち、少なくとも上述したタイミングにおける測定結果を記憶部45で記憶する。ここで説明した測光部17とデータ処理ユニット201の各処理は、後述する精度管理用検体の測定シーケンスの場合も同様である。
【0061】
次に、精度管理用検体の測定シーケンスについて説明する。多種液体容器ホルダ12は、反応容器55へ吐出する精度管理用検体を収容する検体容器53を分注位置P2へ配置する回転動作を行う。その後、反応容器ホルダ14が回転することによって空の反応容器55が分注位置P2に達すると、その上方に位置する検体容器53がノズル534を介して所定量の精度管理用検体を吐出する。反応容器ホルダ14は、上述した一般の検体の測定シーケンスと同様に回転動作を行うものとする。
【0062】
反応容器ホルダ14が上述した回転動作を繰り返し行い、精度管理用検体が吐出された反応容器55が分注位置P3に達すると、その上方に位置する試薬容器54がノズル544を介して検査項目に応じた第1試薬を吐出する。この吐出動作に先立って、試薬容器ホルダ13は、反応容器55へ吐出する第1試薬を収容する試薬容器54を分注位置P3へ配置する回転動作を行っている。
【0063】
第1試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1試薬との混合液を攪拌する。
【0064】
測光部17は、精度管理用検体と第1試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0065】
続いて、反応容器55が反応容器ホルダ14の回転動作によって分注位置P5に達すると、その上方に位置する試薬容器52がノズル524を介して検査項目に応じた第2試薬を吐出する。この吐出動作に先立って、多種液体容器ホルダ12は、反応容器55へ吐出する第2試薬を収容する試薬容器52を分注位置P5へ配置する回転動作を行っている。
【0066】
第2試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1および第2試薬との混合液を攪拌する。
【0067】
測光部17は、精度管理用検体と第1および第2試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0068】
反応容器洗浄部18は、測光部17による測定が終了した反応容器55を洗浄する。これにより、精度管理用検体を分析する場合の測定シーケンスが終了する。
【0069】
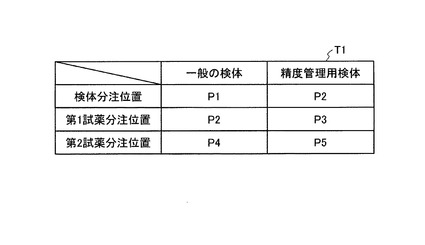
図5は、以上説明した2つの測定シーケンスにおける各種分注位置をまとめて示す図である。同図に示すテーブルT1では、一般の検体を分析する場合と精度管理用検体を分析する場合の各々について、検体分注位置、第1試薬分注位置および第2試薬分注位置を縦に並べて記載している。
【0070】
一般の検体を分析する際の反応容器ホルダ14の回転動作と精度管理用検体を分析する際の反応容器ホルダ14の回転動作とが同じである場合、一般の検体を分析する際の検体分注位置P1→第1試薬分注位置P2の時間間隔は、精度管理用検体を分析する際の検体分注位置P2→第1試薬分注位置P3の時間間隔と等しい。この場合には、一般の検体を分析する際の第1試薬分注位置P2→第2試薬分注位置P4の時間間隔と、精度管理用試薬を分析する際の第1試薬分注位置P3→第2試薬分注位置P5の時間間隔も等しい。
【0071】
したがって、本実施の形態1においては、一般の検体の分析と精度管理用検体の分析とを同じ制御のもとで行うことができる。この結果、例えば多種液体容器ホルダ12における各種試薬と精度管理用検体との配置を考慮することにより、一般の検体の分析と精度管理用検体の分析とを並行して行うことも可能となり、分析時間を短縮し、効率的な分析を実現することができる。
【0072】
以上説明した本発明の実施の形態1によれば、一般の検体の移送経路の内周側に精度管理用検体の移送経路が位置するようにするとともに、試薬の移送経路も一般の検体や精度管理用検体の各移送経路と同心をなすように設定し、さらに一部の試薬の移送経路が精度管理用検体の移送経路と重なるように設定し、試薬と精度管理用検体とを一括して保冷する構造を有しているため、精度管理用検体のホルダを別に設けることなく、一般の検体と精度管理用検体との混同を防止することができる。また、検体と試薬とが一つの円形領域の中に納まる構成を有し、その下方に反応容器が立体的に配置されているため、省スペース化を図ることができる。加えて、一般の検体の分注位置と精度管理用検体の分注位置との距離を、各種検体の分注位置とその検体に対応した試薬の分注位置との距離と等しくすることにより、一般の検体の分析動作と精度管理用検体の分析動作とを同じ制御のもとで行うことができる。したがって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することが可能となる。
【0073】
また、本実施の形態1によれば、反応容器を他の各種容器の下方に配置し、各種容器から直接液体を吐出する構成としたため、従来の自動分析装置のように、検体容器間、試薬容器間でそれぞれ共通のノズルを用いた分注を行わないで済み、検体間や試薬間のコンタミネーションを防止することができる。加えて、従来の自動分析装置のように、各種検体を分注する分注機構としてノズル付きのアームなどが不要となるため、この意味でも省スペース化を図ることができ、分注動作自体も短時間で効率よく行うことができる。
【0074】
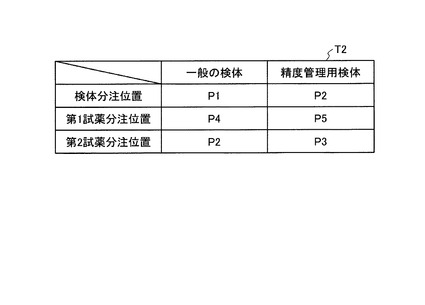
なお、自動分析装置1を用いて一般の検体および精度管理用検体をそれぞれ分析する場合の各種分注位置は、図5のテーブルT1で示す場合に限られるわけではない。図6は、自動分析装置1における各種分注位置の別な設定例を示す図である。図6のテーブルT2に示す場合、一般の検体を分析するときには、分注位置P1で検体を分注した後、第1試薬を分注位置P4で分注し、第2試薬を分注位置P2で分注する。他方、精度管理用検体を分析するときには、分注位置P2で精度管理用検体を分注した後、第1試薬を分注位置P5で分注し、第2試薬を分注位置P3で分注する。
【0075】
(実施の形態2)
図7は、本発明の実施の形態2に係る自動分析装置の要部の構成を模式的に示す図である。同図に示す自動分析装置2の測定ユニット102は、緊急検体を含む一般の検体を収容する検体容器51を複数個保持する検体容器ホルダ61と、検体容器ホルダ61の外周側に位置し、検査項目に応じた試薬を収容する試薬容器52を複数個保持するとともに、精度管理用検体を収容する検体容器53を複数個保持する多種液体容器ホルダ62と、多種液体容器ホルダ62の外周側に位置し、検査項目に応じた試薬を収容する試薬容器54を複数個保持する試薬容器ホルダ63と、検体容器ホルダ61、多種液体容器ホルダ62および試薬容器ホルダ63を一括して保冷する保冷手段としての保冷庫64と、を備える。ここで説明した以外の測定ユニット102の構成は、上記実施の形態1で説明した測定ユニット101の構成と同様である。このため、図7において、測定ユニット101の構成要素と対応する構成要素には、図1と同じ符号を付してある。
【0076】
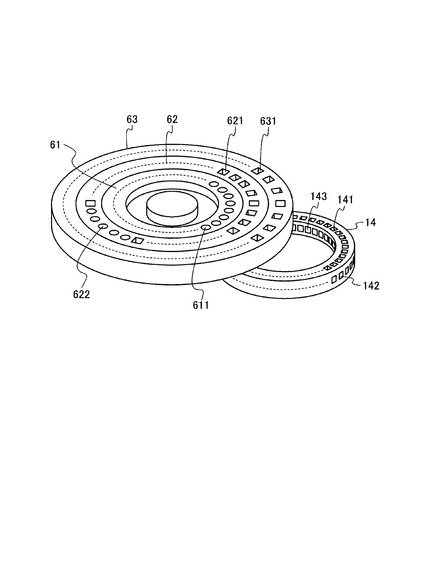
図8は、検体容器ホルダ61、多種液体容器ホルダ62、試薬容器ホルダ63および反応容器ホルダ14の各構成および相互の位置関係を示す斜視図である。以下、図7および図8を参照して、検体容器ホルダ61、多種液体容器ホルダ62および試薬容器ホルダ63の各構成を説明する。
【0077】
検体容器ホルダ61は、検体容器51を保持する保持部611を、検体容器51の移送軌跡をなす第1の円C1'の円周に沿って複数個備える。検体容器ホルダ61は、上記実施の形態1で説明した試薬容器ホルダ13と同様に駆動する。
【0078】
多種液体容器ホルダ62は、試薬容器52を保持する保持部621と、検体容器53を保持する保持部622とを有する。保持部621、622は、第1の円C1'と同心で第1の円C1'よりも径が大きく、試薬容器52および検体容器53の移送軌跡をなす第2の円C2'の円周に沿って複数個ずつ設けられている。
【0079】
試薬容器ホルダ63は、複数の試薬容器54を保持する保持部631を、第2の円C2'と同心で第2の円C2'よりも径が大きい第3の円C3'の円周に沿って複数個備える。試薬容器ホルダ63は、上記実施の形態1で説明した検体容器ホルダ11と同様に駆動する。
【0080】
なお、本実施の形態2において、検体容器51のピストン513を駆動するピストン駆動部23は、分注位置P1'にのみ設けられる。また、試薬容器52のピストン523および検体容器53のピストン533を駆動するピストン駆動部27は、分注位置P2'およびP5'にのみ設けられる。さらに、試薬容器54のピストン543を駆動するピストン駆動部31は、分注位置P3'およびP4'にのみ設けられる。
【0081】
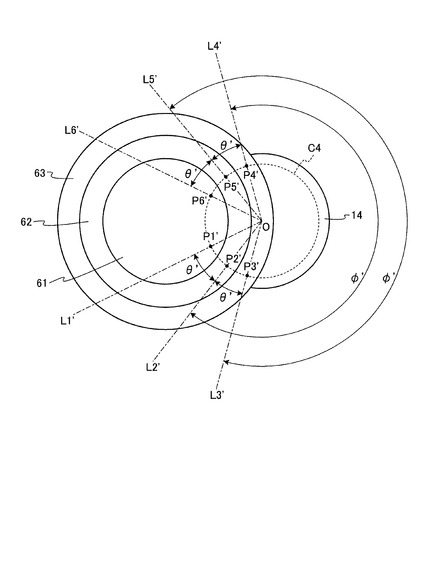
図9は、自動分析装置2が各種検体や試薬を分注する分注位置P1'〜P6'の相互の位置関係を示す図である。同図に示す直線Ln'(n=1,2,3,4,5,6)は、第4の円C4の中心Oおよび分注位置Pn'を通過する直線である。図9において、直線L1'と直線L2'のなす角度は、直線L2'と直線L3'のなす角度に等しい(角度の大きさθ')。このため、図9に示す平面上で、分注位置P1'と分注位置P2'との距離(第1の円C1'と第4の円C4の交点と第2の円C2'と第4の円C4の交点との距離の最小値)は、分注位置P2'と分注位置P3'との距離(第2の円C2'と第4の円C4の交点と第3の円C3'と第4の円C4の交点との距離の最小値)に等しい。また、直線L2'と直線L4'のなす角度は、直線L3'と直線L5'のなす角度に等しく、直線L2'から直線L4'に至るまで反時計回りで回転させたときの角度と、直線L3'から直線L5'に至るまで反時計回りに回転させたときの角度は、ともに大きさがφ'である。
【0082】
図10は、自動分析装置2が一般の検体と精度管理用検体とをそれぞれ分析する場合の各種分注位置の設定例を示す図である。図10のテーブルT3に示す場合、一般の検体を分析するときには、分注位置P1'で検体を分注した後、第1試薬を分注位置P2'で分注し、第2試薬を分注位置P4'で分注する。他方、精度管理用検体を分析するときには、分注位置P2'で精度管理用検体を分注した後、第1試薬を分注位置P3'で分注し、第2試薬を分注位置P5'で分注する。なお、各種分注位置の設定はテーブルT3に示す場合に限られるわけではない。例えば、図6のテーブルT2の分注位置Pn(n=1,2,3,4,5)をPn'へ置換したテーブルにしたがうように各種分注位置を設定することも可能である。
【0083】
ところで、図9において、直線L4'と直線L5'のなす角度は、直線L5'と直線L6'のなす角度に等しい(角度の大きさθ')。したがって、図9に示す平面上で、分注位置P4'と分注位置P5'との距離(第1の円C1'と第4の円C4の交点と第2の円C2'と第4の円C4の交点との距離の最小値)は、分注位置P5'と分注位置P6'との距離(第2の円C2'と第4の円C4の交点と第3の円C3'と第4の円C4の交点との距離の最小値)に等しい。このことをふまえると、自動分析装置2を用いて一般の検体および精度管理用検体をそれぞれ分析する場合の各種分注位置は、図10のテーブルT3で示す場合に限られるわけではない。
【0084】
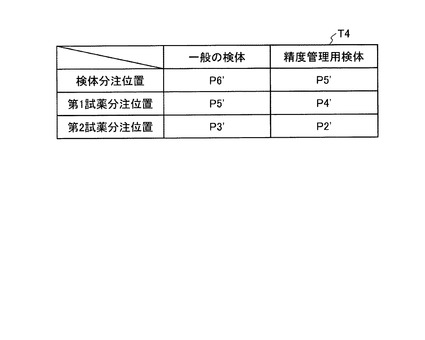
図11は、自動分析装置2における各種分注位置の別な設定例を示す図である。図11のテーブルT4に示す場合、一般の検体を分析するときには、分注位置P6'で検体を分注した後、第1試薬を分注位置P5'で分注し、第2試薬を分注位置P3'で分注する。他方、精度管理用検体を分析するときには、分注位置P5'で精度管理用検体を分注した後、第1試薬を分注位置P4'で分注し、第2試薬を分注位置P2'で分注する。
【0085】
以上説明した本発明の実施の形態2によれば、上述した実施の形態1と同様、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することができる。
【0086】
ここまで、本発明を実施するための最良の形態を詳述してきたが、本発明は上述した実施の形態1、2によって限定されるべきものではない。例えば、図1において、第1の円C1と第4の円C4との交点はもう一つあるため、このもう一つの交点に検体を吐出するための機構を設けることも可能である。
【0087】
また、検体分注手段、多種液体分注手段および試薬分注手段の構成は上述したものに限られるわけではなく、ピエゾ素子を用いた圧電効果によって各種検体や試薬を吐出するようにしてもよいし、空気圧によって各種検体や試薬を吐出するようにしてもよい。
【0088】
また、検体や試薬をそれぞれ分注するノズルを検体容器ホルダや試薬容器ホルダに直接取り付ける構成としてもよい。
【0089】
また、測定ユニットに対して検体容器ホルダ、多種液体容器ホルダおよび試薬容器ホルダを上下動させるための機構を具備させてもよい。この場合には、検体容器ホルダ、多種液体容器ホルダおよび試薬容器ホルダにそれぞれ設けたノズルを洗浄するための洗浄部を、各ホルダの移動軌跡の途上に設けておくことも可能である。
【0090】
なお、本発明に係る自動分析装置は、検体の生化学的な分析のみならず、検体の免疫学的な分析を行う場合や、検体の遺伝学的な分析を行う場合にも適用することができる。
【0091】
このように、本発明は、ここでは記載していない様々な実施の形態等を含みうるものであり、特許請求の範囲により特定される技術的思想を逸脱しない範囲内において種々の設計変更等を施すことが可能である。
【図面の簡単な説明】
【0092】
【図1】本発明の実施の形態1に係る自動分析装置の要部の構成を模式的に示す図である。
【図2】本発明の実施の形態1に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図3】本発明の実施の形態1に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの各構成に各種検体や試薬を分注する機構を加えた図である。
【図4】測定ユニットにおける各種検体および試薬の分注位置の相互の位置関係を模式的に示す図である。
【図5】本発明の実施の形態1に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例を示す図である。
【図6】本発明の実施の形態1に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例(第2例)を示す図である。
【図7】本発明の実施の形態2に係る自動分析装置の要部の構成を模式的に示す図である。
【図8】本発明の実施の形態2に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図9】本発明の実施の形態2に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図10】本発明の実施の形態2に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例を示す図である。
【図11】本発明の実施の形態2に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例(第2例)を示す図である。
【符号の説明】
【0093】
1、2 自動分析装置
11、61 検体容器ホルダ
12、62 多種液体容器ホルダ
13、63 試薬容器ホルダ
14 反応容器ホルダ
15、64 保冷庫
16 攪拌部
17 測光部
17a 光源
17b 分光光学系
17c 受光素子
18 反応容器洗浄部
19 固定軸
20、24、28 軸受
21、25、29 ギア
22、26、30、32 ホルダ駆動部
23、27、31 ピストン駆動部
41 入力部
42 出力部
43 データ生成部
44 制御部
45 記憶部
51、53 検体容器
52、54 試薬容器
55 反応容器
101、102 測定ユニット
111、121、122、134、141、611、621、622、631 保持部
131 容器載置部
132 円盤部
133 円筒部
142、143 窓
151 ホルダ収容部
151a 第1部材
151b 第2部材
151c 第3部材
152 蓋部
152a、152b 開口部
153 冷却器
154 温度センサ
201 データ処理ユニット
511、521、531、541 本体部
512、522、532、542 突出部
513、523、533、543 ピストン
514、524、534、544 ノズル
QC 精度管理用検体
Rg 試薬
Sp 検体
T1、T2、T3、T4 テーブル
【技術分野】
【0001】
本発明は、検体と試薬とを反応させ、この反応の結果を光学的に測定することによって検体の成分を分析する自動分析装置に関する。
【背景技術】
【0002】
従来、検体と試薬とを反応させ、この反応の結果を光学的に測定することによって検体の成分を分析する自動分析装置においては、様々な種類の精度管理用検体を用いた各種精度管理を定期的に行っている。精度管理用検体を自動分析装置で保管する場合には、精度管理用検体の劣化や変性を防止するために、自動分析装置が精度管理用検体を一定の温度で保冷する機能を有している必要がある。この点に鑑みて、従来の自動分析装置は、精度管理用検体を収容する容器を、一般の検体を収容する容器とは別の場所で保持する保冷機能付き容器ホルダを備えている(例えば、特許文献1を参照)。このような従来技術によれば、精度管理用検体を適切な状態に保つことができるだけでなく、一般の検体と精度管理用検体との混同を防止する効果を得ることもできる。
【0003】
【特許文献1】特開2000−258431号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来技術では、一般の検体と精度管理用検体とを別な場所で保管するために多くのスペースが必要であり、装置の小型化を実現する上での障害となっていた。
【0005】
また、上述した従来技術では、一般の検体の分析と精度管理用検体の分析とを異なる制御のもとで行わなければならないため、分析に要する時間を短縮することが難しいという問題もあった。
【0006】
本発明は、上記に鑑みてなされたものであって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することができる自動分析装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明に係る自動分析装置は、分析対象の検体と試薬とを反応させ、この反応の結果を光学的に測定することによって前記分析対象の検体の成分を分析する自動分析装置であって、検体を収容する検体容器を第1の円の円周に沿って移送可能に複数個並べて保持する検体容器ホルダと、試薬を収容する試薬容器および精度管理用検体を収容する精度管理用検体容器を、前記第1の円と同心で前記第1の円と径が異なる第2の円の円周に沿って移送可能に複数個ずつ並べて保持する多種液体容器ホルダと、試薬を収容する第2の試薬容器を、前記第1および第2の円と同心で前記第1および第2の円の各々と径が異なる第3の円の円周に沿って移送可能に複数個並べて保持する試薬容器ホルダと、前記検体容器ホルダ、前記多種液体容器ホルダおよび前記試薬容器ホルダよりも下方に位置し、検体と試薬とを反応させる反応容器を、前記第1乃至第3の円とともに所定の平面へ射影したとき前記第1乃至第3の円とそれぞれ交わる第4の円の円周に沿って移送可能に複数個並べて保持する反応容器ホルダと、前記平面上における前記第1の円と前記第4の円の交点に位置する前記検体容器から直下に位置する前記反応容器へ検体を吐出する検体分注手段と、前記平面上における前記第2の円と前記第4の円の交点に位置する前記試薬容器または前記精度管理用検体容器から直下に位置する前記反応容器へ前記試薬容器が収容する試薬または前記精度管理用検体容器が収容する精度管理用検体を吐出する多種液体分注手段と、前記平面上における前記第3の円と前記第4の円の交点に位置する前記第2の試薬容器から直下に位置する前記反応容器へ試薬を吐出する試薬分注手段と、前記試薬容器が収容する試薬、前記精度管理用検体容器が収容する精度管理用検体および前記第2の試薬容器が収容する試薬を一定温度で保冷する保冷手段と、を備え、前記平面上において、前記第1の円と前記第4の円の交点と前記第2の円と前記第4の円の交点との距離の最小値は、前記第2の円と前記第4の円の交点と前記第3の円と前記第4の円の交点との距離の最小値と等しいことを特徴とする。
【0008】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際、前記多種液体分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、精度管理用検体の成分を分析する際、前記試薬分注手段は、前記第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする。
【0009】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする。
【0010】
また、本発明に係る自動分析装置は、上記発明において、精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0011】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0012】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際、前記試薬分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、精度管理用検体の成分を分析する際、前記多種液体分注手段は、前記第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする。
【0013】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする。
【0014】
また、本発明に係る自動分析装置は、上記発明において、精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0015】
また、本発明に係る自動分析装置は、上記発明において、検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする。
【0016】
また、本発明に係る自動分析装置は、上記発明において、検体の成分の分析と精度管理用検体の分析とを並行して行うことを特徴とする。
【発明の効果】
【0017】
本発明によれば、一般の検体の移送経路の内周側に精度管理用検体の移送経路が位置するようにするとともに、試薬の移送経路も一般の検体や精度管理用検体の各移送経路と同心をなすように設定し、さらに一部の試薬の移送経路が精度管理用検体の移送経路と重なるように設定し、試薬と精度管理用検体とを一括して保冷する構造を有しているため、精度管理用検体のホルダを別に設けることなく、一般の検体と精度管理用検体との混同を防止することができる。また、検体と試薬とが一つの円形領域の中に納まる構成を有し、その下方に反応容器が立体的に配置されているため、省スペース化を図ることができる。加えて、一般の検体の分注位置と精度管理用検体の分注位置との距離を、各種検体の分注位置とその検体に対応した試薬の分注位置との距離と等しくすることにより、一般の検体の分析動作と精度管理用検体の分析動作とを同じ制御のもとで行うことができる。したがって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することが可能となる。
【発明を実施するための最良の形態】
【0018】
以下、添付図面を参照して、本発明を実施するための最良の形態(以後、「実施の形態」と称する)を説明する。なお、以下の説明で参照する図面はあくまでも模式的なものであって、同じ物体を異なる図面で示す場合には、寸法や縮尺等が異なる場合もある。
【0019】
(実施の形態1)
図1は、本発明の実施の形態1に係る自動分析装置の要部の構成を模式的に示す図である。同図に示す自動分析装置1は、分析対象である血液や体液等の検体(試料)とその検体の検査項目に応じた試薬との反応の結果を光学的に測定する測定ユニット101と、測定ユニット101を含む自動分析装置1の制御を行うとともに測定ユニット101における測定結果の分析を行うデータ処理ユニット201とを有し、これら二つのユニットが連携することによって複数の検体の生化学的な分析を自動的かつ連続的に行う装置である。なお、ここでいう「液体」には、微量の固体成分を含有する液体も含まれる。
【0020】
測定ユニット101は、緊急検体を含む一般の検体を収容する検体容器51を複数個保持する検体容器ホルダ11と、検査項目に応じた試薬を収容する試薬容器52を複数個保持するとともに、精度管理用検体を収容する検体容器53(精度管理用検体容器)を複数個保持する多種液体容器ホルダ12と、多種液体容器ホルダ12の内周側に位置し、検査項目に応じた試薬を収容する試薬容器54(第2の試薬容器)を複数個保持する試薬容器ホルダ13と、検体と試薬とを反応させる反応容器55を複数個保持する反応容器ホルダ14と、多種液体容器ホルダ12および試薬容器ホルダ13を含む領域を一定の温度で保冷する保冷手段としての保冷庫15と、反応容器ホルダ14が保持する反応容器55の内部の液体を攪拌する攪拌部16と、反応容器ホルダ14が保持する反応容器55へ光を照射し、この照射した光のうち反応容器55を透過した光を光学的に測定する測光部17と、反応容器ホルダ14が保持する反応容器55の洗浄を行う反応容器洗浄部18と、を備える。
【0021】
図2は、検体容器ホルダ11、多種液体容器ホルダ12、試薬容器ホルダ13、反応容器ホルダ14の各構成および相互の位置関係を示す斜視図である。また、図3は、測定ユニット101の要部の概略構成を示す模式図であり、図1のA−A線に沿った部分断面図に検体や試薬を分注する機構を加えた模式図である。
【0022】
検体容器ホルダ11は、固定軸19を回転中心として回転可能であり、検体容器51を保持し、底面側の径が小さい保持部111を、検体容器51の移送軌跡をなす第1の円C1の円周に沿って複数個備える。
【0023】
検体容器ホルダ11の外周面と自動分析装置1の本体との間には軸受20が設けられ、検体容器ホルダ11の底面にはギア21が設けられている。ギア21に対しては、ホルダ駆動部22が駆動力を伝達する。ホルダ駆動部22は、例えばモータと、このモータの駆動力を伝達し、ギア21と噛合可能なギアとを用いて実現される。
【0024】
保持部111が保持する検体容器51は、有底の中空円筒形状をなして検体Spを収容する本体部511と、本体部511の底面から突出する突出部512と、本体部511が収容する検体Spに対して吐出圧を発生するピストン513と、本体部511の底面から突出部512まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル514と、を有し、保持部111に嵌合可能な形状をなしている。
【0025】
ピストン513は、ピストン駆動部23の駆動によって進退動作を行う。ピストン513の移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン513が下方へ所定量移動すると、その移動量に相当する検体Spが、ノズル514を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン513、ノズル514およびピストン駆動部23が、検体を分注する検体分注手段の少なくとも一部の機能を具備している。
【0026】
ピストン駆動部23は、第1の円C1と反応容器ホルダ14の移送軌跡をなす第4の円C4との同一平面上での交点P1の位置にのみ設けられる。換言すれば、ピストン駆動部23は、交点P1の位置で静止している検体容器51のピストン513のみを駆動することができる。
【0027】
多種液体容器ホルダ12は、固定軸19を回転中心として回転可能であり、試薬容器52を保持する保持部121と、検体容器53を保持する保持部122とを有する。保持部121および122は、第1の円C1と同心で第1の円C1よりも径が小さく、試薬容器52および検体容器53の移送軌跡をなす第2の円C2の円周に沿って複数個ずつ設けられている。
【0028】
多種液体容器ホルダ12の外周面と保冷庫15との間には軸受24が設けられ、多種液体容器ホルダ12の底面にはギア25が設けられている。ギア25に対しては、ホルダ駆動部26が駆動力を伝達する。ホルダ駆動部26は、上述したホルダ駆動部22と同様、モータと、このモータの駆動力を伝達し、ギア25と噛合可能なギアとを用いて実現される。
【0029】
保持部121が保持する試薬容器52は、有底の中空円筒形状をなして試薬Rgを収容する本体部521と、本体部521の底面から突出する突出部522と、本体部521が収容する試薬Rgに対して吐出圧を発生するピストン523と、本体部521の底面から突出部522まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル524と、を有し、保持部121に嵌合可能な形状をなしている。ノズル524の下端の高さは、検体容器51が有するノズル514の下端の高さとほぼ同じであることが望ましい。
【0030】
また、保持部122が保持する検体容器53は、有底の中空円筒形状をなして精度管理用検体QCを収容する本体部531と、本体部531の底面から突出する突出部532と、本体部531が収容する精度管理用検体QCに対して吐出圧を発生するピストン533と、本体部531の底面から突出部532まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル534と、を有し、保持部122に嵌合可能な形状をなしている。ノズル534の下端の高さは、検体容器51が有するノズル514の下端の高さや、試薬容器52が有するノズル524の下端の高さとほぼ同じであることが望ましい。
【0031】
ピストン523および533は、ピストン駆動部27の駆動によって進退動作を行う。ピストン523および533の各移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン523が下方へ所定量移動すると、その移動量に相当する試薬Rgが、ノズル524を介して直下に位置する反応容器55へ吐出される。またピストン533が下方へ所定量移動すると、その移動量に相当する精度管理用検体QCが、ノズル534を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン523、ノズル524、ピストン533、ノズル534およびピストン駆動部27が、試薬または精度管理用検体を分注する多種液体分注手段の少なくとも一部の機能を具備している。
【0032】
ピストン駆動部27は、第2の円C2と第4の円C4との同一平面上での交点P2およびP5の位置にのみ設けられる。換言すれば、ピストン駆動部27は、交点P2またはP5で静止している試薬容器52のピストン523または検体容器53のピストン533のみを駆動することができる。
【0033】
精度管理用検体QCは、検体に含まれる成分の濃度が既知であるような検体であり、例えば検量線作成用の検体などである。
【0034】
試薬容器ホルダ13は、固定軸19を回転中心として回転可能であり、複数の試薬容器54を保持する。試薬容器ホルダ13は、複数の試薬容器54を、第2の円C2と同心であって第2の円C2よりも径が小さい第3の円C3の円周に沿って並べて保持する容器載置部131と、容器載置部131を支持する円盤部132と、円盤部132の中心部に設けられ、固定軸19を回転中心として回転可能な円筒部133と、を有する。容器載置部131は、試薬容器54を保持する保持部134を、第3の円C3の円周に沿って複数個備える。円筒部133の内周面と固定軸19の外周面との間には軸受28が設けられており、円筒部133の底面にはギア29が設けられている。ギア29に対しては、ホルダ駆動部30が駆動力を伝達する。ホルダ駆動部30は、上述したホルダ駆動部22と同様、モータと、このモータの駆動力を伝達し、ギア29と噛合可能なギアとを用いて実現される。
【0035】
保持部134が保持する試薬容器54は、有底の中空角柱形状をなして試薬Rgを収容し、保持部134に嵌合可能な形状をなす本体部541と、本体部541の底面から突出する突出部542と、本体部541が収容する試薬Rgに対して吐出圧を発生するピストン543と、本体部541の底面から突出部542まで貫通するように取り付けられ、先端が下方を指向して外部へ露出する細径のノズル544と、を有する。ノズル544の下端の高さは、検体容器51が有するノズル514の下端の高さ、試薬容器52が有するノズル524の下端の高さ、検体容器53が有するノズル534の下端の高さとほぼ同じであることが望ましい。なお、試薬容器ホルダ13の形状によっては、試薬容器52を容器載置部131へ載置することも可能である。
【0036】
ピストン543は、ピストン駆動部31の駆動によって進退動作を行う。ピストン543の移動量は、データ処理ユニット201が有する制御部44によって制御される。ピストン543が下方へ所定量移動すると、その移動量に相当する試薬Rgが、ノズル544を介して直下に位置する反応容器55へ吐出される。このように、本実施の形態1においては、ピストン543、ノズル544およびピストン駆動部31が、試薬を分注する試薬分注手段の少なくとも一部の機能を具備している。
【0037】
ピストン駆動部31は、第3の円C3と第4の円C4との交点P3とP4にのみ設けられる。換言すれば、ピストン駆動部31は、交点P3およびP4で静止している試薬容器54のピストン543のみを駆動することができる。
【0038】
本実施の形態1では、多種液体容器ホルダ12および試薬容器ホルダ13が検体容器ホルダ11よりも内周側に設けられている。このため、一般の検体を収容する検体容器51と精度管理用検体を収容する検体容器53とを混同する恐れはない。また、試薬容器52、54や検体容器53よりも交換の頻度が高い検体容器51が外周側に位置するため、容器の交換も行いやすく、交換の際に検体と試薬との間のコンタミネーションを生じる恐れがない。さらに、多種液体容器ホルダ12および試薬容器ホルダ13が検体容器ホルダ11の内周側に位置しているため、試薬や精度管理用検体を保冷する保冷庫15を設置しやすい。
【0039】
反応容器ホルダ14は、有底の中空角柱形状をなし、透明な材料を用いて形成される反応容器55を保持する保持部141を複数個備える。保持部141は、反応容器55の移送軌跡をなす第4の円C4の円周に沿って設けられている。第4の円C4は、第1の円C1、第2の円C2および第3の円C3を所定の平面(例えば図1の面)へ射影したとき第1の円C1、第2の円C2および第3の円C3とそれぞれ交わる。反応容器ホルダ14は、ホルダ駆動部32の駆動によって第4の円C4の円周方向に回転可能である。
【0040】
反応容器ホルダ14の外側面および内側面には、測光部17が反応容器55へ照射する光を透過させるための窓142および143がそれぞれ設けられている。また、反応容器ホルダ14は、保持部141が保持する反応容器55の内部の温度を37℃程度に保つための恒温槽(図示せず)を有する。
【0041】
保冷庫15は、試薬容器52、54、検体容器53を囲むように設けられ、試薬容器52、54、検体容器53がそれぞれ収容する試薬や精度管理用検体の劣化や変性を抑えるため、試薬や精度管理用検体を一定温度で保冷する機能を有する。保冷庫15は、多種液体容器ホルダ12および試薬容器ホルダ13を収容するホルダ収容部151と、ホルダ収容部151の上方に開閉可能に設けられる蓋部152と、ホルダ収容部151と蓋部152とによって囲まれた内部領域を冷却する冷却器153と、保冷庫15の内部の温度を測定する温度センサ154と有する。
【0042】
ホルダ収容部151は、中心に開口部を有し、固定軸19および試薬容器ホルダ13の円筒部133が貫通している第1部材151aと、第1部材151aの外周に配置される円環状の第2部材151bと、第2部材151bの外周に配置され、試薬容器ホルダ13の外縁部を底面から側面にかけて包囲する第3部材151cとを備える。第1部材151aと第2部材151bとの境界には、ノズル544を外部へ表出するための細い円形の隙間が設けられている。第2部材151bと第3部材151cとの境界には、ノズル524やノズル534を外部へ表出するための細い円形の隙間が設けられている。
【0043】
蓋部152のうち、多種液体容器ホルダ12が保持する試薬容器52が収容する試薬または検体容器53が収容する精度管理用検体を分注する位置P2およびP5の上方には、ピストン駆動部27がピストン523または533を駆動するための開口部152aがそれぞれ設けられている。また、蓋部152のうち、試薬容器ホルダ13が保持する試薬容器54が収容する試薬を分注する位置P3およびP4の上方には、ピストン駆動部31がピストン543を駆動するための開口部152bがそれぞれ設けられている。
【0044】
測光部17は、白色光を照射する光源17aと、光源17aが照射した白色光のうち、反応容器55を透過してきた白色光を分光する分光光学系17bと、分光光学系17bで分光した光を成分ごとに受光して電気信号に変換する受光素子17cとを有する。
【0045】
反応容器洗浄部18は、一つの反応容器55に対して、反応液の吸引、洗剤の吐出および吸引、洗浄液の吐出および吸引、乾燥の各処理を順次行う。反応容器洗浄部18が使用する洗浄液は、例えばイオン交換水である。
【0046】
なお、図1では、攪拌部16、測光部17、反応容器洗浄部18の相互の位置関係は必ずしも正確ではない。これらの正確な位置関係は、各種容器ホルダの回転態様や分注動作などの条件に応じて適宜定められる。
【0047】
次に、データ処理ユニット201の構成を説明する。データ処理ユニット201は、図1に示すように、キーボードやマウスなどを有し、検体の分析に必要な情報や自動分析装置1の動作指示信号などを含む情報等の入力を受ける入力部41と、液晶等のディスプレイ装置やプリンタを有し、検体の分析に関する情報等を出力する出力部42と、測定ユニット101における測定結果に基づいて検体の分析データを生成するデータ生成部43と、自動分析装置1の制御を行う制御部44と、測定ユニット101の測定結果に基づいた演算結果を含む各種情報を記憶する記憶部45と、を備え、CPU,ROM,RAM等を具備したコンピュータによって実現される。
【0048】
データ生成部43は、測定ユニット101の測光部17から受信した測定結果の分析演算を行う。この分析演算では、測光部17から送られてくる測定結果に基づいて反応容器55内部の液体の吸光度を算出したり、吸光度の算出結果と検量線や分析パラメータ等の各種情報とを用いて反応容器55内部の液体の成分を定量的に求めたりすることにより、検体ごとの分析データを生成する。
【0049】
記憶部45は、データ生成部43が生成した分析データのほか、検査項目、検体情報、試薬の種類、検体や試薬の分注量、検体や試薬の有効期限、分析に使用する検量線に関する情報、分析に必要なパラメータなどを記憶する。
【0050】
図4は、以上の構成を有する自動分析装置1が各種検体や試薬を分注する分注位置P1〜P5の相互の位置関係を示す図である。同図に示す直線Ln(n=1,2,3,4,5)は、第4の円C4の中心Oおよび分注位置Pnを通過する直線である。図4において、直線L1と直線L2のなす角度は、直線L2と直線L3のなす角度に等しく、その大きさはθである。換言すると、図4に示す平面上で、分注位置P1と分注位置P2との距離(第1の円C1と第4の円C4の交点と第2の円C2と第4の円C4の交点との距離の最小値)は、分注位置P2と分注位置P3との距離(第2の円C2と第4の円C4の交点と第3の円C3と第4の円C4の交点との距離の最小値)に等しい。また、直線L2と直線L4のなす角度は、直線L3と直線L5のなす角度に等しく、その大きさはφである。
【0051】
自動分析装置1の分注位置P1〜P5が上述した位置関係を有することにより、一般の検体と精度管理用検体とを同じ制御のもとで分析することが可能となる。以下、一般の検体の測定シーケンスと精度管理用検体の測定シーケンスとが同じ制御のもとで実行可能であることを具体的に説明する。
【0052】
まず、自動分析装置1が行う一般の検体の測定シーケンスの例を説明する。検体容器ホルダ11は、反応容器55へ吐出する検体を収容する検体容器51を分注位置P1へ配置する回転動作を行う。その後、反応容器ホルダ14が回転することによって空の反応容器55が分注位置P1に達すると、その上方に位置する検体容器51がノズル514を介して所定量の検体を吐出する。反応容器ホルダ14は、例えば図1や図4で反時計回りに1周+1ポジション分の回転を行って静止し、各種液体を吐出するのに必要な時間が経過した後、前述した回転動作を繰り返す。
【0053】
反応容器ホルダ14が上述した回転動作を繰り返し行い、検体が吐出された反応容器55が分注位置P2に達すると、その上方に位置する試薬容器52がノズル524を介し、検査項目に応じて検体と最初に反応させる第1試薬を吐出する。この吐出動作に先立って、多種液体容器ホルダ12は、反応容器55へ吐出する第1試薬を収容する試薬容器52を分注位置P2へ配置する回転動作を行っている。試薬容器52を分注位置P2へ配置する際には、多種液体容器ホルダ12を分注位置P2までの距離が近い方向へ回転させるようにすればより好ましい。
【0054】
第1試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1試薬との混合液を攪拌する。
【0055】
測光部17は、検体と第1試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201では、データ生成部43が、受信した測定結果に基づいた分析演算を行う。その後、出力部42は、分析演算によって得られた分析データを出力する一方、記憶部45は、その分析データを格納して記憶する。
【0056】
続いて、反応容器55が反応容器ホルダ14の回転動作によって分注位置P4に達すると、その上方に位置する試薬容器54がノズル544を介し、検査項目に応じて検体と2番目に反応させる第2試薬を吐出する。この吐出動作に先立って、試薬容器ホルダ13は、反応容器55へ吐出する第2試薬を収容する試薬容器54を分注位置P4へ配置する回転動作を行っている。
【0057】
第2試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1および第2試薬との混合液を攪拌する。
【0058】
測光部17は、検体と第1および第2試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0059】
反応容器洗浄部18は、測光部17による測定が終了した反応容器55を洗浄する。これにより、一般の検体を分析する場合の測定シーケンスが終了する。
【0060】
なお、測光部17は、反応容器ホルダ14が回転する際、光源17aの光路を通過する全ての反応容器55に対する測定を行っている。このため、1回の測定シーケンスの間、測光部17は反応容器55に対して上記以外のタイミングでも測定を行う。データ処理ユニット201は、測光部17から送られてくる測定結果のうち、少なくとも上述したタイミングにおける測定結果を記憶部45で記憶する。ここで説明した測光部17とデータ処理ユニット201の各処理は、後述する精度管理用検体の測定シーケンスの場合も同様である。
【0061】
次に、精度管理用検体の測定シーケンスについて説明する。多種液体容器ホルダ12は、反応容器55へ吐出する精度管理用検体を収容する検体容器53を分注位置P2へ配置する回転動作を行う。その後、反応容器ホルダ14が回転することによって空の反応容器55が分注位置P2に達すると、その上方に位置する検体容器53がノズル534を介して所定量の精度管理用検体を吐出する。反応容器ホルダ14は、上述した一般の検体の測定シーケンスと同様に回転動作を行うものとする。
【0062】
反応容器ホルダ14が上述した回転動作を繰り返し行い、精度管理用検体が吐出された反応容器55が分注位置P3に達すると、その上方に位置する試薬容器54がノズル544を介して検査項目に応じた第1試薬を吐出する。この吐出動作に先立って、試薬容器ホルダ13は、反応容器55へ吐出する第1試薬を収容する試薬容器54を分注位置P3へ配置する回転動作を行っている。
【0063】
第1試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1試薬との混合液を攪拌する。
【0064】
測光部17は、精度管理用検体と第1試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0065】
続いて、反応容器55が反応容器ホルダ14の回転動作によって分注位置P5に達すると、その上方に位置する試薬容器52がノズル524を介して検査項目に応じた第2試薬を吐出する。この吐出動作に先立って、多種液体容器ホルダ12は、反応容器55へ吐出する第2試薬を収容する試薬容器52を分注位置P5へ配置する回転動作を行っている。
【0066】
第2試薬が吐出された反応容器55は、その後、反応容器ホルダ14の回転動作によって攪拌部16へ移送される。攪拌部16は、反応容器55が収容する検体と第1および第2試薬との混合液を攪拌する。
【0067】
測光部17は、精度管理用検体と第1および第2試薬とを攪拌した後の反応容器55が反応容器ホルダ14の回転動作によって光源17aの光路を通過した時、反応容器55が収容する混合液の吸光度の測定を行い、測定結果をデータ処理ユニット201へ送信する。測光部17の測定結果を受信したデータ処理ユニット201の処理は、上記同様である。
【0068】
反応容器洗浄部18は、測光部17による測定が終了した反応容器55を洗浄する。これにより、精度管理用検体を分析する場合の測定シーケンスが終了する。
【0069】
図5は、以上説明した2つの測定シーケンスにおける各種分注位置をまとめて示す図である。同図に示すテーブルT1では、一般の検体を分析する場合と精度管理用検体を分析する場合の各々について、検体分注位置、第1試薬分注位置および第2試薬分注位置を縦に並べて記載している。
【0070】
一般の検体を分析する際の反応容器ホルダ14の回転動作と精度管理用検体を分析する際の反応容器ホルダ14の回転動作とが同じである場合、一般の検体を分析する際の検体分注位置P1→第1試薬分注位置P2の時間間隔は、精度管理用検体を分析する際の検体分注位置P2→第1試薬分注位置P3の時間間隔と等しい。この場合には、一般の検体を分析する際の第1試薬分注位置P2→第2試薬分注位置P4の時間間隔と、精度管理用試薬を分析する際の第1試薬分注位置P3→第2試薬分注位置P5の時間間隔も等しい。
【0071】
したがって、本実施の形態1においては、一般の検体の分析と精度管理用検体の分析とを同じ制御のもとで行うことができる。この結果、例えば多種液体容器ホルダ12における各種試薬と精度管理用検体との配置を考慮することにより、一般の検体の分析と精度管理用検体の分析とを並行して行うことも可能となり、分析時間を短縮し、効率的な分析を実現することができる。
【0072】
以上説明した本発明の実施の形態1によれば、一般の検体の移送経路の内周側に精度管理用検体の移送経路が位置するようにするとともに、試薬の移送経路も一般の検体や精度管理用検体の各移送経路と同心をなすように設定し、さらに一部の試薬の移送経路が精度管理用検体の移送経路と重なるように設定し、試薬と精度管理用検体とを一括して保冷する構造を有しているため、精度管理用検体のホルダを別に設けることなく、一般の検体と精度管理用検体との混同を防止することができる。また、検体と試薬とが一つの円形領域の中に納まる構成を有し、その下方に反応容器が立体的に配置されているため、省スペース化を図ることができる。加えて、一般の検体の分注位置と精度管理用検体の分注位置との距離を、各種検体の分注位置とその検体に対応した試薬の分注位置との距離と等しくすることにより、一般の検体の分析動作と精度管理用検体の分析動作とを同じ制御のもとで行うことができる。したがって、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することが可能となる。
【0073】
また、本実施の形態1によれば、反応容器を他の各種容器の下方に配置し、各種容器から直接液体を吐出する構成としたため、従来の自動分析装置のように、検体容器間、試薬容器間でそれぞれ共通のノズルを用いた分注を行わないで済み、検体間や試薬間のコンタミネーションを防止することができる。加えて、従来の自動分析装置のように、各種検体を分注する分注機構としてノズル付きのアームなどが不要となるため、この意味でも省スペース化を図ることができ、分注動作自体も短時間で効率よく行うことができる。
【0074】
なお、自動分析装置1を用いて一般の検体および精度管理用検体をそれぞれ分析する場合の各種分注位置は、図5のテーブルT1で示す場合に限られるわけではない。図6は、自動分析装置1における各種分注位置の別な設定例を示す図である。図6のテーブルT2に示す場合、一般の検体を分析するときには、分注位置P1で検体を分注した後、第1試薬を分注位置P4で分注し、第2試薬を分注位置P2で分注する。他方、精度管理用検体を分析するときには、分注位置P2で精度管理用検体を分注した後、第1試薬を分注位置P5で分注し、第2試薬を分注位置P3で分注する。
【0075】
(実施の形態2)
図7は、本発明の実施の形態2に係る自動分析装置の要部の構成を模式的に示す図である。同図に示す自動分析装置2の測定ユニット102は、緊急検体を含む一般の検体を収容する検体容器51を複数個保持する検体容器ホルダ61と、検体容器ホルダ61の外周側に位置し、検査項目に応じた試薬を収容する試薬容器52を複数個保持するとともに、精度管理用検体を収容する検体容器53を複数個保持する多種液体容器ホルダ62と、多種液体容器ホルダ62の外周側に位置し、検査項目に応じた試薬を収容する試薬容器54を複数個保持する試薬容器ホルダ63と、検体容器ホルダ61、多種液体容器ホルダ62および試薬容器ホルダ63を一括して保冷する保冷手段としての保冷庫64と、を備える。ここで説明した以外の測定ユニット102の構成は、上記実施の形態1で説明した測定ユニット101の構成と同様である。このため、図7において、測定ユニット101の構成要素と対応する構成要素には、図1と同じ符号を付してある。
【0076】
図8は、検体容器ホルダ61、多種液体容器ホルダ62、試薬容器ホルダ63および反応容器ホルダ14の各構成および相互の位置関係を示す斜視図である。以下、図7および図8を参照して、検体容器ホルダ61、多種液体容器ホルダ62および試薬容器ホルダ63の各構成を説明する。
【0077】
検体容器ホルダ61は、検体容器51を保持する保持部611を、検体容器51の移送軌跡をなす第1の円C1'の円周に沿って複数個備える。検体容器ホルダ61は、上記実施の形態1で説明した試薬容器ホルダ13と同様に駆動する。
【0078】
多種液体容器ホルダ62は、試薬容器52を保持する保持部621と、検体容器53を保持する保持部622とを有する。保持部621、622は、第1の円C1'と同心で第1の円C1'よりも径が大きく、試薬容器52および検体容器53の移送軌跡をなす第2の円C2'の円周に沿って複数個ずつ設けられている。
【0079】
試薬容器ホルダ63は、複数の試薬容器54を保持する保持部631を、第2の円C2'と同心で第2の円C2'よりも径が大きい第3の円C3'の円周に沿って複数個備える。試薬容器ホルダ63は、上記実施の形態1で説明した検体容器ホルダ11と同様に駆動する。
【0080】
なお、本実施の形態2において、検体容器51のピストン513を駆動するピストン駆動部23は、分注位置P1'にのみ設けられる。また、試薬容器52のピストン523および検体容器53のピストン533を駆動するピストン駆動部27は、分注位置P2'およびP5'にのみ設けられる。さらに、試薬容器54のピストン543を駆動するピストン駆動部31は、分注位置P3'およびP4'にのみ設けられる。
【0081】
図9は、自動分析装置2が各種検体や試薬を分注する分注位置P1'〜P6'の相互の位置関係を示す図である。同図に示す直線Ln'(n=1,2,3,4,5,6)は、第4の円C4の中心Oおよび分注位置Pn'を通過する直線である。図9において、直線L1'と直線L2'のなす角度は、直線L2'と直線L3'のなす角度に等しい(角度の大きさθ')。このため、図9に示す平面上で、分注位置P1'と分注位置P2'との距離(第1の円C1'と第4の円C4の交点と第2の円C2'と第4の円C4の交点との距離の最小値)は、分注位置P2'と分注位置P3'との距離(第2の円C2'と第4の円C4の交点と第3の円C3'と第4の円C4の交点との距離の最小値)に等しい。また、直線L2'と直線L4'のなす角度は、直線L3'と直線L5'のなす角度に等しく、直線L2'から直線L4'に至るまで反時計回りで回転させたときの角度と、直線L3'から直線L5'に至るまで反時計回りに回転させたときの角度は、ともに大きさがφ'である。
【0082】
図10は、自動分析装置2が一般の検体と精度管理用検体とをそれぞれ分析する場合の各種分注位置の設定例を示す図である。図10のテーブルT3に示す場合、一般の検体を分析するときには、分注位置P1'で検体を分注した後、第1試薬を分注位置P2'で分注し、第2試薬を分注位置P4'で分注する。他方、精度管理用検体を分析するときには、分注位置P2'で精度管理用検体を分注した後、第1試薬を分注位置P3'で分注し、第2試薬を分注位置P5'で分注する。なお、各種分注位置の設定はテーブルT3に示す場合に限られるわけではない。例えば、図6のテーブルT2の分注位置Pn(n=1,2,3,4,5)をPn'へ置換したテーブルにしたがうように各種分注位置を設定することも可能である。
【0083】
ところで、図9において、直線L4'と直線L5'のなす角度は、直線L5'と直線L6'のなす角度に等しい(角度の大きさθ')。したがって、図9に示す平面上で、分注位置P4'と分注位置P5'との距離(第1の円C1'と第4の円C4の交点と第2の円C2'と第4の円C4の交点との距離の最小値)は、分注位置P5'と分注位置P6'との距離(第2の円C2'と第4の円C4の交点と第3の円C3'と第4の円C4の交点との距離の最小値)に等しい。このことをふまえると、自動分析装置2を用いて一般の検体および精度管理用検体をそれぞれ分析する場合の各種分注位置は、図10のテーブルT3で示す場合に限られるわけではない。
【0084】
図11は、自動分析装置2における各種分注位置の別な設定例を示す図である。図11のテーブルT4に示す場合、一般の検体を分析するときには、分注位置P6'で検体を分注した後、第1試薬を分注位置P5'で分注し、第2試薬を分注位置P3'で分注する。他方、精度管理用検体を分析するときには、分注位置P5'で精度管理用検体を分注した後、第1試薬を分注位置P4'で分注し、第2試薬を分注位置P2'で分注する。
【0085】
以上説明した本発明の実施の形態2によれば、上述した実施の形態1と同様、一般の検体と精度管理用検体との混同を防止しながらも装置を小型化することができ、かつ分析に要する時間を短縮することができる。
【0086】
ここまで、本発明を実施するための最良の形態を詳述してきたが、本発明は上述した実施の形態1、2によって限定されるべきものではない。例えば、図1において、第1の円C1と第4の円C4との交点はもう一つあるため、このもう一つの交点に検体を吐出するための機構を設けることも可能である。
【0087】
また、検体分注手段、多種液体分注手段および試薬分注手段の構成は上述したものに限られるわけではなく、ピエゾ素子を用いた圧電効果によって各種検体や試薬を吐出するようにしてもよいし、空気圧によって各種検体や試薬を吐出するようにしてもよい。
【0088】
また、検体や試薬をそれぞれ分注するノズルを検体容器ホルダや試薬容器ホルダに直接取り付ける構成としてもよい。
【0089】
また、測定ユニットに対して検体容器ホルダ、多種液体容器ホルダおよび試薬容器ホルダを上下動させるための機構を具備させてもよい。この場合には、検体容器ホルダ、多種液体容器ホルダおよび試薬容器ホルダにそれぞれ設けたノズルを洗浄するための洗浄部を、各ホルダの移動軌跡の途上に設けておくことも可能である。
【0090】
なお、本発明に係る自動分析装置は、検体の生化学的な分析のみならず、検体の免疫学的な分析を行う場合や、検体の遺伝学的な分析を行う場合にも適用することができる。
【0091】
このように、本発明は、ここでは記載していない様々な実施の形態等を含みうるものであり、特許請求の範囲により特定される技術的思想を逸脱しない範囲内において種々の設計変更等を施すことが可能である。
【図面の簡単な説明】
【0092】
【図1】本発明の実施の形態1に係る自動分析装置の要部の構成を模式的に示す図である。
【図2】本発明の実施の形態1に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図3】本発明の実施の形態1に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの各構成に各種検体や試薬を分注する機構を加えた図である。
【図4】測定ユニットにおける各種検体および試薬の分注位置の相互の位置関係を模式的に示す図である。
【図5】本発明の実施の形態1に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例を示す図である。
【図6】本発明の実施の形態1に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例(第2例)を示す図である。
【図7】本発明の実施の形態2に係る自動分析装置の要部の構成を模式的に示す図である。
【図8】本発明の実施の形態2に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図9】本発明の実施の形態2に係る自動分析装置が有する検体容器ホルダ、多種液体容器ホルダ、試薬容器ホルダおよび反応容器ホルダの相互の位置関係を模式的に示す図である。
【図10】本発明の実施の形態2に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例を示す図である。
【図11】本発明の実施の形態2に係る自動分析装置の一般の検体分析時と精度管理用検体分析時における各種分注位置の設定例(第2例)を示す図である。
【符号の説明】
【0093】
1、2 自動分析装置
11、61 検体容器ホルダ
12、62 多種液体容器ホルダ
13、63 試薬容器ホルダ
14 反応容器ホルダ
15、64 保冷庫
16 攪拌部
17 測光部
17a 光源
17b 分光光学系
17c 受光素子
18 反応容器洗浄部
19 固定軸
20、24、28 軸受
21、25、29 ギア
22、26、30、32 ホルダ駆動部
23、27、31 ピストン駆動部
41 入力部
42 出力部
43 データ生成部
44 制御部
45 記憶部
51、53 検体容器
52、54 試薬容器
55 反応容器
101、102 測定ユニット
111、121、122、134、141、611、621、622、631 保持部
131 容器載置部
132 円盤部
133 円筒部
142、143 窓
151 ホルダ収容部
151a 第1部材
151b 第2部材
151c 第3部材
152 蓋部
152a、152b 開口部
153 冷却器
154 温度センサ
201 データ処理ユニット
511、521、531、541 本体部
512、522、532、542 突出部
513、523、533、543 ピストン
514、524、534、544 ノズル
QC 精度管理用検体
Rg 試薬
Sp 検体
T1、T2、T3、T4 テーブル
【特許請求の範囲】
【請求項1】
分析対象の検体と試薬とを反応させ、この反応の結果を光学的に測定することによって前記分析対象の検体の成分を分析する自動分析装置であって、
検体を収容する検体容器を第1の円の円周に沿って移送可能に複数個並べて保持する検体容器ホルダと、
試薬を収容する試薬容器および精度管理用検体を収容する精度管理用検体容器を、前記第1の円と同心で前記第1の円と径が異なる第2の円の円周に沿って移送可能に複数個ずつ並べて保持する多種液体容器ホルダと、
試薬を収容する第2の試薬容器を、前記第1および第2の円と同心で前記第1および第2の円の各々と径が異なる第3の円の円周に沿って移送可能に複数個並べて保持する試薬容器ホルダと、
前記検体容器ホルダ、前記多種液体容器ホルダおよび前記試薬容器ホルダよりも下方に位置し、検体と試薬とを反応させる反応容器を、前記第1乃至第3の円とともに所定の平面へ射影したとき前記第1乃至第3の円とそれぞれ交わる第4の円の円周に沿って移送可能に複数個並べて保持する反応容器ホルダと、
前記平面上における前記第1の円と前記第4の円の交点に位置する前記検体容器から直下に位置する前記反応容器へ検体を吐出する検体分注手段と、
前記平面上における前記第2の円と前記第4の円の交点に位置する前記試薬容器または前記精度管理用検体容器から直下に位置する前記反応容器へ前記試薬容器が収容する試薬または前記精度管理用検体容器が収容する精度管理用検体を吐出する多種液体分注手段と、
前記平面上における前記第3の円と前記第4の円の交点に位置する前記第2の試薬容器から直下に位置する前記反応容器へ試薬を吐出する試薬分注手段と、
前記試薬容器が収容する試薬、前記精度管理用検体容器が収容する精度管理用検体および前記第2の試薬容器が収容する試薬を一定温度で保冷する保冷手段と、
を備え、
前記平面上において、前記第1の円と前記第4の円の交点と前記第2の円と前記第4の円の交点との距離の最小値は、前記第2の円と前記第4の円の交点と前記第3の円と前記第4の円の交点との距離の最小値と等しいことを特徴とする自動分析装置。
【請求項2】
検体の成分を分析する際、前記多種液体分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、
精度管理用検体の成分を分析する際、前記試薬分注手段は、前記第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする請求項1記載の自動分析装置。
【請求項3】
検体の成分を分析する際に前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする請求項2記載の自動分析装置。
【請求項4】
精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項2または3記載の自動分析装置。
【請求項5】
検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項2〜4のいずれか一項記載の自動分析装置。
【請求項6】
検体の成分を分析する際、前記試薬分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、
精度管理用検体の成分を分析する際、前記多種液体分注手段は、前記第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする請求項1記載の自動分析装置。
【請求項7】
検体の成分を分析する際に前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする請求項6記載の自動分析装置。
【請求項8】
精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項6または7記載の自動分析装置。
【請求項9】
検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項6〜8のいずれか一項記載の自動分析装置。
【請求項10】
検体の成分の分析と精度管理用検体の分析とを並行して行うことを特徴とする請求項1〜9のいずれか一項記載の自動分析装置。
【請求項1】
分析対象の検体と試薬とを反応させ、この反応の結果を光学的に測定することによって前記分析対象の検体の成分を分析する自動分析装置であって、
検体を収容する検体容器を第1の円の円周に沿って移送可能に複数個並べて保持する検体容器ホルダと、
試薬を収容する試薬容器および精度管理用検体を収容する精度管理用検体容器を、前記第1の円と同心で前記第1の円と径が異なる第2の円の円周に沿って移送可能に複数個ずつ並べて保持する多種液体容器ホルダと、
試薬を収容する第2の試薬容器を、前記第1および第2の円と同心で前記第1および第2の円の各々と径が異なる第3の円の円周に沿って移送可能に複数個並べて保持する試薬容器ホルダと、
前記検体容器ホルダ、前記多種液体容器ホルダおよび前記試薬容器ホルダよりも下方に位置し、検体と試薬とを反応させる反応容器を、前記第1乃至第3の円とともに所定の平面へ射影したとき前記第1乃至第3の円とそれぞれ交わる第4の円の円周に沿って移送可能に複数個並べて保持する反応容器ホルダと、
前記平面上における前記第1の円と前記第4の円の交点に位置する前記検体容器から直下に位置する前記反応容器へ検体を吐出する検体分注手段と、
前記平面上における前記第2の円と前記第4の円の交点に位置する前記試薬容器または前記精度管理用検体容器から直下に位置する前記反応容器へ前記試薬容器が収容する試薬または前記精度管理用検体容器が収容する精度管理用検体を吐出する多種液体分注手段と、
前記平面上における前記第3の円と前記第4の円の交点に位置する前記第2の試薬容器から直下に位置する前記反応容器へ試薬を吐出する試薬分注手段と、
前記試薬容器が収容する試薬、前記精度管理用検体容器が収容する精度管理用検体および前記第2の試薬容器が収容する試薬を一定温度で保冷する保冷手段と、
を備え、
前記平面上において、前記第1の円と前記第4の円の交点と前記第2の円と前記第4の円の交点との距離の最小値は、前記第2の円と前記第4の円の交点と前記第3の円と前記第4の円の交点との距離の最小値と等しいことを特徴とする自動分析装置。
【請求項2】
検体の成分を分析する際、前記多種液体分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、
精度管理用検体の成分を分析する際、前記試薬分注手段は、前記第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする請求項1記載の自動分析装置。
【請求項3】
検体の成分を分析する際に前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする請求項2記載の自動分析装置。
【請求項4】
精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項2または3記載の自動分析装置。
【請求項5】
検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項2〜4のいずれか一項記載の自動分析装置。
【請求項6】
検体の成分を分析する際、前記試薬分注手段は、分析対象の検体と最初に反応させる第1試薬を前記反応容器へ吐出し、前記多種液体分注手段は、前記分析対象の検体と2番目に反応させる第2試薬を前記反応容器へ吐出し、
精度管理用検体の成分を分析する際、前記多種液体分注手段は、前記第1試薬を前記反応容器へ吐出し、前記試薬分注手段は、前記第2試薬を前記反応容器へ吐出することを特徴とする請求項1記載の自動分析装置。
【請求項7】
検体の成分を分析する際に前記多種液体分注手段が前記第2試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置と同じであることを特徴とする請求項6記載の自動分析装置。
【請求項8】
精度管理用検体の成分を分析する際、前記多種液体分注手段が当該精度管理用検体を前記反応容器へ吐出する位置は、前記多種液体分注手段が前記第1試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項6または7記載の自動分析装置。
【請求項9】
検体の成分を分析する際に前記試薬分注手段が前記第1試薬を前記反応容器へ吐出する位置は、精度管理用検体の成分を分析する際に前記試薬分注手段が前記第2試薬を前記反応容器へ吐出する位置と異なることを特徴とする請求項6〜8のいずれか一項記載の自動分析装置。
【請求項10】
検体の成分の分析と精度管理用検体の分析とを並行して行うことを特徴とする請求項1〜9のいずれか一項記載の自動分析装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−115614(P2009−115614A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2007−288879(P2007−288879)
【出願日】平成19年11月6日(2007.11.6)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成19年11月6日(2007.11.6)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]