
製品を運搬し、且つ製品をバッファするためのバッファーコンベア
製品を運搬し、且つ製品をバッファするためのバッファーコンベアは、第1の細長いコンベア(7)と、反対方向に駆動することができる第2の細長いコンベア(8)とを備える。第1のコンベア及び第2のコンベアは、互いに少なくとも略平行で、且つ互いに隣接する経路に延在される。移動ユニット(11)は、前記経路において第1のコンベア及び第2のコンベアに少なくとも略平行に移動可能であり、移動ユニット(11)には、第1のコンベアから第2のコンベアに製品を移動するための移動装置(17)が設けられる。移動ユニットは、好ましくは、第1のコンベア及び第2のコンベアの速度に応じて、移動ユニットを移動するための駆動ユニットを備える。移動ユニットの駆動ユニットは、少なくとも部分的に移動ユニットの動きを追従する駆動モータ(12)を備える。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一つずつ運搬されている小包商品など、特に、箱、クレート、飲料用カートン、及び同様のものなど、ボトル、缶、同様のものなどの大量流通商品などの、製品を運搬し、且つ製品をバッファするためのバッファーコンベアに関する。そのようなバッファーコンベアは、少なくとも1つの第1の細長いコンベアであって、第1の方向に駆動されることができ、且つ供給端部を有する第1の細長いコンベアと、第2の細長いコンベアであって、第2の反対方向に駆動されることができ、且つ排出端部を有する第2の細長いコンベアと、互いに少なくとも略平行で、且つ互いに近接した経路で延在する第1のコンベア及び第2のコンベアと、移動ユニットであって、前記経路で第1のコンベア及び第2のコンベアに少なくとも略平行に移動可能であり、且つ第1のコンベアから第2のコンベアへ製品を移動するための移動装置が設けられる移動ユニットと、を備えるバッファーコンベアにおいて、移動ユニットは、好ましくは、第1のコンベア及び第2のコンベアの速度に依存して、移動ユニットを駆動するための駆動ユニットを備えている。
【背景技術】
【0002】
そのような移動ユニットは、その多くの実施形態において周知である。移動ユニットの様々な駆動方法は、可能である。一方では、バッファーコンベアは、移動ユニットがそれぞれの駆動ユニットを有していない点で周知であるが、移動ユニットが、差異を介して、第1のコンベア及び第2のコンベア(第1のコンベア及び第2のコンベアの駆動ユニット)に接続され、それによって、移動ユニットは、前記コンベアの運搬速度に依存した速度で、第1のコンベア及び第2のコンベアによって、駆動される。さらに、バッファーコンベアは、移動ユニットが、固定の駆動モータによって駆動される点で周知であり、移動ユニットに接続され、循環型の駆動要素などの接続要素を介して移動ユニットを駆動する点で周知である。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明の目的は、移動ユニットを駆動する新しい方法を具現化しているバッファーコンベアを提供することである。その目的を達成するために、本発明によるバッファーコンベアは、移動ユニットの駆動ユニットが駆動モータを備え、少なくとも部分的に移動ユニットの動きを追従することを特徴とする。
【課題を解決するための手段】
【0004】
それぞれの駆動モータを有する移動ユニットを構成する利点は、速度伝達比が固定される機械的差(mechanical differential)に対して、これが移動ユニットを駆動する点において、より大きい自由度に導くことである。駆動モータが少なくとも部分的に移動ユニットの動きを追従するので、厳格ではない要求は、駆動モータと移動ユニットとの間の伝達を行うことができる。それ故に、本発明は、単純化、費用面における利点、及び高信頼性のバッファーコンベアに導く。伝達は、駆動要素が、移動ユニットと共に移動する取り付け要素に取り付けられる場合に、全く無視されることができる。この場合において、駆動モータは、取り付け要素が移動ユニット上に取り付けられる場合又は移動ユニットに取り付けられる場合に、移動ユニットと完全に一体化されることができる。その場合において、駆動ユニットは、好ましくは、一方では駆動モータと係合して駆動し、他方では、フレーム又は、第1のコンベア及び/又は第2のコンベアのいずれかと係合して駆動する伝達装置を備える。前記係合は、例えば、固定の環状のギアを係合する駆動モータのギアと共に、摩擦によって又はギアを介して影響を与えることができるが、隣接する第1のコンベア及び/又は第2のコンベアとの係合を通じて移動ユニットを駆動することも可能である。
【0005】
バッファーコンベアの変形実施形態において、運搬経路が垂直軸の周囲に巻き付き、一の端部で中央支柱に回転可能に接続され、他の端部で移動ユニットを駆動するために移動ユニットに接続されたアームを使用することが可能になる。駆動モータは、その場合にアーム内に取り付けられ、又はアームに取り付けられる場合があり、駆動し、且つアームの動きを少なくとも部分的に追従するためにそれに接続される場合がある。
【0006】
運搬経路が、例えば、楕円形状の構成又は水平方向螺旋状(渦巻き(volute))の構成などの支柱に対して非同心円状に延在する場合、アームには、好ましくは、移動ユニットと支柱との間の変化する距離にアームを適合するための手段が設けられる。
【0007】
前記経路が水平面で湾曲するだけでなく、垂直方向に少なくとも部分的に延在する場合に、任意の場合における駆動モータが移動ユニットの垂直方向の動きを追従することが好ましい。
【0008】
少なくとも部分的に移動ユニットと共に移動する駆動モータは、例えば、バッテリーなどの移動ユニットと共に移動するエネルギー源、又は滑り接触、移動ユニット又は同様のものと共に移動するケーブルを介して固定のエネルギー源に接続されることができる。固定の制御ユニットと移動ユニット上の制御ユニットとの間のデータ通信は、例えば、無線信号を介して行われ、又は誘導を通じて行われる。
【0009】
移動ユニットの駆動ユニットが第1のコンベア及び第2のコンベアの速度を独立して操作する場合に、バッファーコンベアには、好ましくは、前記速度を測定するためのセンサー、及び測定された速度に応じて移動ユニットの駆動ユニットを制御するための制御ユニットが設けられる。前記センサーは、固定の位置で配置されることができるが、前記センサーは、移動ユニットに接続されることもでき、この場合において、移動ユニットの速度に対する第1のコンベア速度及び第2のコンベア速度は、測定される。
【0010】
本発明は図面を参照してより詳細に説明され、その図面において本発明によるバッファーコンベアの複数の実施形態が非常に概略的に図示される
【発明を実施するための最良の形態】
【0011】
図面は、製品を運搬し、且つ製品をバッファするためのバッファーコンベアを示す。そのようなバッファは通常、生産ラインで行われ、製品が異なる位置で異なる加工ステップ又は異なる処理ステップを受け、且つそれらの位置でプロセス速度の一時的な差異が補償されなければならない生産ラインで行われる。製品は、容器、例えば特にボトル、缶、ポット、カートン、及び同様のものからなるが、タバコ、箱、ケース、又は考えうる同様のものなどの様々な他の小包物品からなる場合がある。ボトル又はカートンの場合において、加工ラインは、ボトルに飲料を充填する瓶詰めラインなどの、議論されている容器に充填するための充填ラインからなる。バッファーコンベアは、例えば、デパレタイザーステーション(depalletising station)と洗浄及び/又は充填ステーションの間、充填ステーションとラベル貼りステーションとの間、又は、ラベル貼りステーションと詰め込みステーションとの間に配置されることができる。他の用途もまた、もちろん考えうる。
【0012】
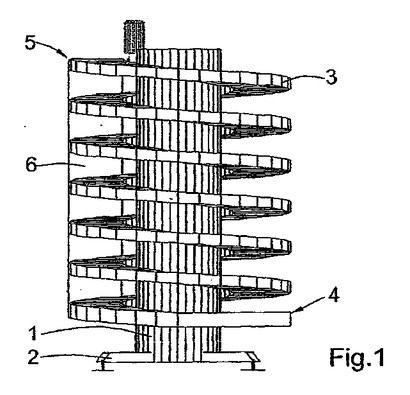
図示されたバッファーコンベアは、フレームを備え、この場合において、ベース2及び螺旋状の案内シュート3を有する中央支柱1が設けられ、螺旋状の案内シュート3が中央支柱の周りに延在し、且つ中央支柱に取り付けられるフレームを備える。全ての種類の他のフレームの構造は、もちろん考慮される。端部ローラーは、案内シュートの下端4及び上端5に取り付けられ、且つ、フレームの戻りシュート6は螺旋状の案内シュート3の端部の間に延在する。本発明によるバッファーコンベアのこの実施形態において、案内シュート3及び戻りシュート6は、第1の細長いコンベア7及び第2の細長いコンベア8を支持し、例えば、互いに隣接して延在する1つ又は複数の運搬ベルトがそれぞれ設けられる場合がある。2つのコンベア7、8の運搬部分及び戻り部分は、異なる経路に沿って移動する。戻り部分が、運搬部分のために案内シュート3の下側に沿って導かれる実施形態を使用することもまた、考えられる。
【0013】
第1のコンベア7及び第2のコンベア8の様々な実施形態は、(好ましくは)多少の閉鎖された運搬表面が得られる限り、可能である。そのようなコンベアの例は、スラットコンベア(slat conveyors)、リンクコンベア、ステンレス鋼のチェーンコンベア、繊維ベルトコンベア、ポリ塩化ビニール(PVC)のベルトコンベア、スチールのベルトコンベア、及び同様のものであり、その例示の種類は一般的に、直線状のコンベアで使用するだけのために適切であり、すなわち、非湾曲コンベアである。本発明もまた、直線状のコンベアに延在し、しかしながら、水平面内のみに湾曲されたコンベアに延在し、垂直方向に延在するコンベアに延在し、及びエンドレスコンベアとして構成されておらず、例えばローラコンベアとして又は空気コンベア又は磁気コンベアとして構成されたコンベアに延在する。
【0014】
図1に示された実施形態において、螺旋状のシュート3は、8つの巻き付け(winding)を備えるが、議論されている用途に依存して、より多い数又はより少ない数の巻き付けを使用することもできる。例えば、コンベア7、8上のガイドローラーの使用は、任意の駆動問題を引き起こすことなく、多数の巻き付けの上にコンベアを駆動することを可能にさせる。2つのコンベア7、8は、それらの駆動モータ9、10をそれぞれ有し、それら自体の駆動モータは、この場合において上端ローラー5に隣接して取り付けられ、関連されたコンベアベルト7,8を駆動する。2つのコンベアもまた、供給コンベア又は排出コンベアに接続され、それ故に、駆動され、且つ前記コンベアによって制御されることができる。
【0015】
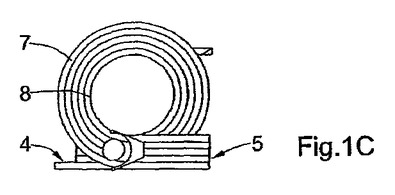
図1A−図1Cの2つのコンベア7、8(それぞれが、図面に示された実施形態において2つのコンベアベルトを備える。)は、この場合における反対方向に、互いに独立して駆動されることができ、すなわち、製品が、矢印P1によって示されるように、下端4で供給端部から第1のコンベアベルト7の運搬表面上を上方に向けて運搬され、且つ下端4で排出端部に向けて、(矢印P2に示されるように)第2のコンベアベルト8の運搬面の上を再び下方に向けて運搬される。矢印P1、P2によって示された位置で、製品は、移動ユニット11によって第1のコンベアベルト7の運搬表面から第2のコンベアベルト8の運搬表面まで移動される。
【0016】
移動ユニット11は、バッファーコンベア内で移動可能であり、第1のコンベアと第2のコンベアとの間の空間で案内される。移動ユニット11の位置は、バッファーコンベアの供給端部と排出端部との間の所望されるバッファ能力に依存する。第1のコンベア7の供給割合が第2のコンベア8の排出割合より高い場合、供給されている超過の製品は、バッファーコンベア内にバッファされなければならない、且つ移動ユニット11は、バッファーコンベア上のより多くの製品を集めるように、その場合において、バッファーコンベアの供給端部から離れて移動しなければならない。他の場合において、第1のコンベア7の供給割合が第2のコンベア8の排出割合より低い場合、移動ユニット11は、排出端部にバッファされた製品を供給するように、排出端部の方向に移動しなければならない。実際には、バッファーコンベアは、例えば、バッファ時間の5〜15分で十分である多数の製品をバッファすることができ、例えば、その期間が供給割合と排出割合との間のバランスを回復するために一般的に十分である。
【0017】
移動ユニット11には、バッファーコンベア内の移動ユニット11の位置変化に影響を与えるための駆動ユニットが設けられ、その駆動ユニットは、好ましくは、第1のコンベア7及び第2のコンベア8の速度に依存して操作する。移動ユニット11のための前記駆動ユニットは、駆動モータ12を備え、その駆動モータ12は、少なくとも部分的に移動ユニットの動きを追従する。
【0018】
本明細書のこの部分以降に議論される図1D及び図2から図22は、様々な方法で駆動されることができる移動ユニット11が設けられたバッファーコンベアの様々な実施形態を備える。
【0019】
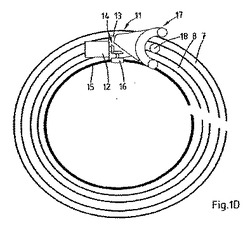
図1Dは、図1によるバッファーコンベアを示し、図1Dでは、第1のコンベア7と、第2のコンベア8と、駆動モータ11が設けられる移動ユニット11とは、区別されることができる。この実施形態には、駆動モータ12は、取り付け部分13に取り付けられ、この取り付け部分13は、コンベア7、8の湾曲が、移動ユニットが移動することができるその経路に沿って、例えば直線状の部分及び湾曲された部分を備える経路で変化するかどうかという事実に依存して、移動ユニット11に固定可能又は移動可能のどちらかで接続される移動ユニット11及び取り付け部分13は、この場合において、互いに対して少なくとも略垂直軸に関して回転することができる。この方法において、駆動モータ12は、第1のコンベア7及び第2のコンベア8が、前記部分の湾曲における変化の場合、互いに平行に延在する部分の形状にその位置を適合することができる。これは、例えば電気モータからなる場合がある駆動モータ12が、固定部分、この場合において伝達装置14のピニオン16と係合するリングギア15、を有する伝達装置14を介して係合する状態にある場合に、特に重要である。取り付け部分13が移動ユニット11に対して移動することができる場合、ピニオン16がリングギア15と係合する位置は、重要ではない。図示された場合において、駆動モータ12は、水平の回転軸を有し、それによって、伝達装置14は、ピニオン16の回転の横方向に延在している軸にもかかわらず、同様の水平方向に対して垂直に延在する。
【0020】
互いに係合される歯付きのピニオン16及びリングギア15を有するよりはむしろ、コンベア7及び8の経路に沿って延在するホイールとトラックとの摩擦性の接触を使用することもまた、可能である。移動ユニット11は、移動装置17と、第1のコンベア7から第2のコンベア8まで移動するための移動要素18とを備える。この場合の移動装置17は、駆動されたベルトを備え、この駆動されたベルト自体は、例えば、優先権書類から周知であり、その内容は、参照によって、本明細書に組み込まれる。移動装置18の可能な構成は、優先権書類に示される。移動装置17及び移動要素18は、第1のコンベアから第2のコンベアへ製品を移動することを可能にし、その目的のために、それらの2つのコンベアの間で固定される。他の実施形態をさらに参照してより詳細に説明されるように、優先権書類に示された方法に比べて、2つの部分を駆動する様々なほかの方法がある。
【0021】
図2の実施形態において、駆動モータ12は、移動ユニット11に直接的に回転可能に取り付けられる。伝達装置14のピニオン16には歯が設けられていようといまいと、伝達装置14のピニオン16は、この場合固定のリングギア又はトラックと係合するのではなく、コンベア7、8のうちの一のコンベア(この場合、コンベア8)と係合し、それによってコンベア7、8のうちの一のコンベアに対する移動は直接的に影響される。
【0022】
図3は、駆動モータ12が、少なくとも略垂直に延在するその回転軸と共に、移動ユニット11に直接的に取り付けられる実施形態を示す。駆動モータは、この場合駆動ベルトとして構成される、伝達装置14を介してギア又は摩擦調車(friction wheel)16に駆動可能に取り付けられ、このギア又は摩擦調車16は、少なくとも略垂直方向の軸に関して同様に回転可能であり、且つこの場合、大きい直径を有する中央支柱1の外側と係合する。
【0023】
図4は、バッファーコンベアの変形実施形態を示し、この変形実施形態は、移動ユニット11がアーム19を介して駆動され、アーム19は、一端で支柱1に回転可能に接続され、他端で又は他端に隣接して移動ユニット11に駆動可能に接続される。垂直方向に移動する移動ユニット11の場合において、アーム19は、螺旋状の経路に沿ってその移動中に移動ユニット11と同一の高さで留まる方法で、支柱1に対して垂直方向に移動可能である。アーム19は、別個の駆動機構を介して、垂直方向に移動されることができるが、例えば、この実施形態において、(このケースの場合)コンベア7、8の螺旋状の経路によって形成されたスクリュー(screw)を介して移動される。アーム19は、その目的のために、ホイール20を介して第1のコンベア7上に支持される。駆動モータ12の外部シャフト上のギアは、中央支柱1に接続される遊星歯車又はリングギア15と係合しており、それに対して垂直方向の移動の可能にするが回転に対して固定されている。
【0024】
図5は、先の実施形態の変形実施形態を示し、駆動モータ12は、どちらも、アーム19上に取り付けられておらず、アーム19と共に回転せず、支柱に対して垂直方向の移動を可能にするが回転に対して固定されるように支柱1に固定して接続される駆動モータ12は、この目的のために、例えば、アーム19に接続された滑り軸受を介して垂直方向に案内されることができる。
【0025】
図5Aは、図4の実施形態の他の変形実施形態を示し、アーム19は、垂直方向に移動可能ではなく、第1のコンベア7の外周を越えて突出して、(又は、第2のコンベアベルト8の内周の内側に留まって、)螺旋状に延在するコンベア7、8の最上の巻き付けの上に延在する、又は最下の巻き付けの下に延在する。アーム19及び移動ユニット11は、この場合において、接続要素21を介して相互接続され、この接続要素21は、アーム19と移動ユニット11との間の高さにおける差異を補償するように、長さを変化することができる。駆動モータ12の位置は、この場合において、アーム19であるけれども。図4に示される位置に同等であり、それ故に、駆動モータ11が回転移動のみ可能であり、支柱1に対して並進移動が可能ではない。
【0026】
図6は、図4の他の変形実施形態を示し、コンベア7及び8は、螺旋状の経路で再び延在し、しかしながら、円形ではなく、むしろ楕円形ベース形状を有する。これは、第1の位置で、コンベア7及び8の湾曲部が運搬経路に沿って変更することを暗示し、移動ユニット11と支柱1との間の水平方向の空間が運搬経路の長さに沿って変更することを暗示する。アーム19は、この目的のために、移動ユニット11と支柱1との間の変化する空間にアームを適合することが可能である手段が設けられ、その手段は、この実施形態では伸縮自在のアーム22を備える。前記伸縮自在のアーム22は、例えば、垂直方向のヒンジ23を介して、アーム22及び移動ユニット11が少なくとも略垂直方向の軸に関して互いに対して回動することが可能である方法で、移動ユニット11に接続される。
【0027】
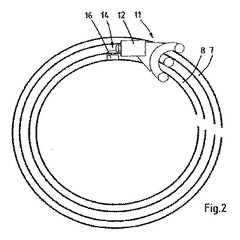
図7は、図1Dの実施形態の変形実施形態を示し、主な差異は、螺旋状の経路が楕円形のベース形状を有し、取り付け要素13に取り付けられた駆動モータ12を有する取り付け要素13は、少なくとも略垂直方向のヒンジ24を介して移動ユニット11に接続される。
【0028】
図8は、図4の実施形態の他の変形実施形態を示し、駆動モータ12は、駆動モータ12が駆動ベルト25及びプーリーを介して支柱1に接続されると共に、駆動モータの回転軸が垂直方向に延在する方法で、アーム19上に取り付けられる。前記プーリーは、順々に支柱1に接続され、回転に対して固定されるが、支柱に対して垂直方向に調節可能である。
【0029】
図9は、図8の実施形態の変形実施形態を示し、移動ユニット11は大量の流れ(mass flow)で運搬されている製品Pを移動するために適合されている。円形の断面を有する製品は、この場合、ボトル、ポット、又は同様のものなどに関連される。この場合において、(それぞれ複数の並んでいるコンベアベルトからなる場合もある)第1のコンベア7と第2のコンベア8との間の任意の間隙がほとんど存在せず、それによって、製品は、第1のコンベア7から第2のコンベア8へ直接的に移動されることができる。移動ユニット11の移動装置17は、単純で移動不可能なガイドからなり、このガイドは、第2のコンベア8に横方向において移動要素18のガイドと接触する状態になる製品を移動する機能を果たす。移動装置17のガイドは、この場合において、前記移動を効果的に支援するように移動されることもできる。
【0030】
図10は、製品に面する側で、第1のコンベア7から第2のコンベア8へ移動する移動ベルトを循環する形態で、移動可能な移動装置17を備える変形実施形態を示す。
【0031】
図11は、図9の実施形態の変形実施形態を示し、ガイド26はコンベア7、8に取り付けられ、それ故に、製品を案内するためにその半径方向の外側及び半径方向の内側のそれぞれで、ガイド26に沿って移動する。
【0032】
図12は、図9の実施形態の他の変形実施形態を示し、第1のコンベア7及び第2のコンベア8に平行に延在している中央ガイド27は、第1のコンベアと第2のコンベアとの間に設けられる。前記中央ガイド27は、移動ユニット11の動きを追従する。中央ガイド27は、その目的のために、移動ユニット11に結合され、移動ユニット11と同時に駆動される。移動装置17に面する中央ガイド27の端部は、そこから固定の距離で離間され、それによって、中央ガイド27と移動装置17との間の空間に存在する製品Pは、第1のコンベア7から第2のコンベア8に移動されることができる。中央ガイド27は、第1のコンベア7と第2のコンベア8との間の小さな間隙内に配置される場合があり、又は、第1のコンベアベルト7及び第2のコンベアベルト8の上に取り付けられガイドから吊るされる場合もある。
【0033】
図13に示された変形実施形態において、移動要素18は、移動装置17に面する中央ガイド27の端部に取り付けられる。前記アクティブな移動装置17は、製品Pを移動することを支援する。移動要素18は、この目的のために、1つ又は複数の垂直方向の軸に関して回転可能であり、それによって、ある種の推進器(propeller)が得られ、移動要素18の偏心往復移動(いわゆる、“揺動ユニット(wagging unit)”)が考慮される。さらなる変形実施形態が可能である。
【0034】
図14に示された変形実施形態において、中央ガイド27には、移動要素18が設けられ、この移動要素18は、アクティブな要素であろうとなかろうと、アクティブな移動装置17と組み合わされ、この場合において、循環する移動装置17と組み合わされる。この変形実施形態において、中央ガイド27は、第1のコンベア7と第2のコンベア8との間に配置され、それ故に、形成された間隙には、移動装置17と移動要素18との間の領域で可撓性を有するブリッジ要素が設けられる。ブリッジ要素の上面は、第1のコンベア7及び第2のコンベア8の運搬表面と同一の面内に載置し、それによって、製品は、第1のコンベア7から第2のコンベア8へ可撓性を有するブリッジ要素28を介して移動されることができる。ブリッジ要素28は、中央ガイド27と一体化される場合があり、又は別個の要素からなる場合もある。ブリッジ要素28は、運搬経路の少なくとも一部に沿って、移動ユニット11の移動を追従するために、移動ユニット11又は中央ガイド27のどちらかに接続される。
【0035】
図15は、図10に示された実施形態の変形実施形態を示し、第1のコンベア7及び第2のコンベア8は、僅かな距離で離間され、固定のブリッジ要素29は、コンベアの間の僅かな間隙内に配置され、そのブリッジ要素は、運搬経路に平行に、運搬経路の少なくとも一部に沿って延在する。ブリッジ要素29の表面は、第1のコンベア7及び第2のコンベア8の運搬表面と少なくとも略同一の面に順番に載置される。この場合において、移動ユニット11に隣接して存在する製品は、第1のコンベア7から第2のコンベア8へ、固定のブリッジ要素29を介して移動する。
【0036】
図16は、図14に示された実施形態の変形実施形態の図であり、アクティブな移動要素18が駆動されることができる方法を示す。この場合において、移動要素18は、駆動手段31によって駆動ベルト30を介して駆動される。前記駆動手段31は、例えば、差異を介して、第1のコンベア7と第2のコンベア8との間の速度の差に応じて駆動されるために、駆動モータである場合があり、2つのコンベア7,8に接続される場合がある。駆動装置31もまた、コンベア7,8の一方によって駆動される場合がある。駆動手段31もまた、移動装置17を駆動するために使用される。
【0037】
図17は、図4の実施形態に対応する実施形態の図であり、その移動装置17を駆動するための駆動手段31が示されている。移動装置17の駆動ベルトは、この目的のために、駆動手段31の上方で通過される。
【0038】
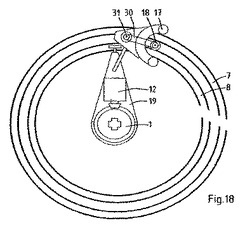
図18は、この実施形態において、駆動手段31がまた、移動装置17の反対側に配置された移動要素18を駆動するために使用されることもできることを示す。
【0039】
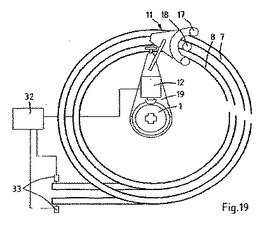
図19は、移動ユニット11のための駆動モータ12が制御され得る方法を示す。図19は、制御ユニット32を示し、この制御ユニット32は、一方では駆動モータ12に接続され、他方ではセンサー33に接続される。このセンサー33は、その運搬ベルトで、又はその駆動ギアを介して、第1のコンベア7及び第2のコンベア8の速度を測定する。センサー33によって行われた検出に基づいて、制御ユニットは、駆動モータ12のために所望される速度を計算する。これは、第1のコンベア7と第2のコンベア8との間の速度における差異、及び、場合により(変化する)要素が役割を果たす計算式に基づいて起こる。
【0040】
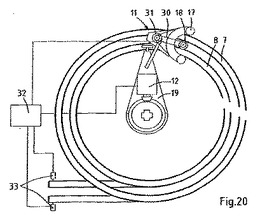
図20に示されるように、制御ユニット34はまた、移動手段17及び移動要素18のために、駆動手段31及び、この場合において移動モータに接続される場合もある。前記駆動手段31はまた、センサー33から得られた情報に基づいて制御される場合がある。駆動モータ12及び31を関連するエネルギー源、特に電力手段に接続するために、使用は、コンベア7及びコンベア8の経路に略平行に延在する滑り接触(sliding contact)からなる場合があるが、例えば、駆動モータ12,13に支柱1から延在しているケーブルと共に、回転接続(rotary connection)の使用することが可能である。制御ユニット32と駆動モータ12及び31との間の接続は、同一の方法で又は、例えば電波信号を介して、又は、誘導を通じて、起こる場合がある。
【0041】
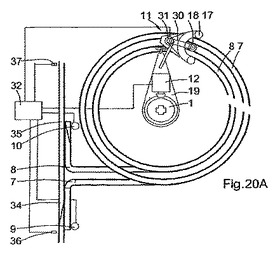
図20Aは、第1のコンベア7及び第2のコンベア8が供給コンベア34及び排出ベルト35に接続され、供給コンベア34及び排出ベルト35が、この実施形態において一体である実施形態を示す。センサー36及び37は、供給コンベア34及び排出コンベア35上に存在する製品の量(供給又は排出されていない、十分に供給又は排出されている、又は、過剰に供給又は排出されているなど)を測定する。制御ユニット32は、測定データに基づいて、第1のコンベア7及び第2のコンベア8の駆動モータ9、10、移動ユニット11の駆動モータ12、及び/又は(部分的に)移動ユニット17の駆動手段31を制御する。
【0042】
図20Bにおいて、供給コンベア34及び排出コンベア35は接続されておらず、制御ユニット32はまた、先のプロセス又は次のプロセスに輸送を適合するように、互いにシステム内の様々なコンベアリンクを最適に連動して、供給コンベア34及び排出コンベア35のモータ38及びモータ39を制御し、さらに、ラインにおける加工プロセス又は処理プロセスを監視される。
【0043】
図21に示される変形実施形態において、制御ユニット32及びセンサー33は、移動ユニット11上に取り付けられる、又は移動ユニット11に取り付けられる。それによって、連通及び接続は、かなり単純化される。エネルギー源が同様にバッテリーの形態である場合、移動ユニット11は独立して機能することができる。この場合において、センサー33は、コンベア7、8の絶対速度を測定しないが、移動ユニット11に対するその速度を測定し、移動ユニット11の要求される速度は、前記測定に基づいて計算されることができる。
【0044】
図22は、移動ユニット11の他の変形実施形態を示し、製品の形状のために、特に、例えば大きい製品Pを移動するように意図され、連続的に循環された移動ユニットによって移動されることができない。図示された実施形態において、「フラップベルト」型のプッシャーは、移動装置17として使用されるが、ロッドプッシャー又は同様のものを使用することもできる。どちらの場合において、移動ユニット17は、不連続なストロークを行い、そのようなストロークは、センサーが移動装置17に近接して製品の存在を検出する場合に、のみ行われる。移動装置17は、次いで、転化運動を行い、プッシャーを移動するための循環ベルトを使用させる図示された実施形態において、移動装置は、次の製品Pを移動するために直接的に用意されることができる。移動装置のストロークは、トレーシングシステムから知られるように、コンピュータ計算によって、開始される場合もある。
【0045】
前述から、本発明がバッファーコンベアを提供し、様々な方法で具現化され、製品の移動の多目的に使用可能である方法を提供することが明白になる。移動ユニットの駆動は、議論されている用途に容易に適合されることができる。所望される場合に、様々な実施形態は、組み合わされることができ、それによって、一の実施形態の特定の特徴が他の実施形態にまとめられることもできる。
【図面の簡単な説明】
【0046】
【図1】本発明によるコンベアの第1の実施形態の非常に概略的な側面図である。
【図1A】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1B】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1C】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1D】本発明に関する移動ユニットの第1の実施形態を有するバッファーコンベアのウィンディングの拡大図である。
【図2】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図3】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図4】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図5】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図5A】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図6】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図7】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図8】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図9】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図10】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図11】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図12】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図13】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図14】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図15】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図16】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図17】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図18】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図19】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20A】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20B】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図21】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図22】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【符号の説明】
【0047】
1 中央支柱
2 ベース
3 螺旋状の案内シュート
4 下端
5 上端
6 戻りシュート
7 第1の細長いコンベア
8 第2の細長いコンベア
9 駆動モータ
10 駆動モータ
11 移動ユニット
12 駆動モータ
13 取り付け部分
14 伝達装置
15 リングギア
16 ピニオン
17 移動ユニット
18 移動要素
19 アーム
20 ホイール
21 接続要素
22 アーム
23 垂直方向のヒンジ
24 垂直方向のヒンジ
25 駆動ベルト
26 ガイド
27 中央ガイド
28 ブリッジ要素
29 静止状態のブリッジ要素
30 駆動ベルト
31 駆動手段
32 制御ユニット
33 センサー
34 供給コンベア
35 排出コンベア
36 センサー
37 センサー
38 モータ
39 モータ
P 製品
P1 矢印
P2 矢印
【技術分野】
【0001】
本発明は、一つずつ運搬されている小包商品など、特に、箱、クレート、飲料用カートン、及び同様のものなど、ボトル、缶、同様のものなどの大量流通商品などの、製品を運搬し、且つ製品をバッファするためのバッファーコンベアに関する。そのようなバッファーコンベアは、少なくとも1つの第1の細長いコンベアであって、第1の方向に駆動されることができ、且つ供給端部を有する第1の細長いコンベアと、第2の細長いコンベアであって、第2の反対方向に駆動されることができ、且つ排出端部を有する第2の細長いコンベアと、互いに少なくとも略平行で、且つ互いに近接した経路で延在する第1のコンベア及び第2のコンベアと、移動ユニットであって、前記経路で第1のコンベア及び第2のコンベアに少なくとも略平行に移動可能であり、且つ第1のコンベアから第2のコンベアへ製品を移動するための移動装置が設けられる移動ユニットと、を備えるバッファーコンベアにおいて、移動ユニットは、好ましくは、第1のコンベア及び第2のコンベアの速度に依存して、移動ユニットを駆動するための駆動ユニットを備えている。
【背景技術】
【0002】
そのような移動ユニットは、その多くの実施形態において周知である。移動ユニットの様々な駆動方法は、可能である。一方では、バッファーコンベアは、移動ユニットがそれぞれの駆動ユニットを有していない点で周知であるが、移動ユニットが、差異を介して、第1のコンベア及び第2のコンベア(第1のコンベア及び第2のコンベアの駆動ユニット)に接続され、それによって、移動ユニットは、前記コンベアの運搬速度に依存した速度で、第1のコンベア及び第2のコンベアによって、駆動される。さらに、バッファーコンベアは、移動ユニットが、固定の駆動モータによって駆動される点で周知であり、移動ユニットに接続され、循環型の駆動要素などの接続要素を介して移動ユニットを駆動する点で周知である。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明の目的は、移動ユニットを駆動する新しい方法を具現化しているバッファーコンベアを提供することである。その目的を達成するために、本発明によるバッファーコンベアは、移動ユニットの駆動ユニットが駆動モータを備え、少なくとも部分的に移動ユニットの動きを追従することを特徴とする。
【課題を解決するための手段】
【0004】
それぞれの駆動モータを有する移動ユニットを構成する利点は、速度伝達比が固定される機械的差(mechanical differential)に対して、これが移動ユニットを駆動する点において、より大きい自由度に導くことである。駆動モータが少なくとも部分的に移動ユニットの動きを追従するので、厳格ではない要求は、駆動モータと移動ユニットとの間の伝達を行うことができる。それ故に、本発明は、単純化、費用面における利点、及び高信頼性のバッファーコンベアに導く。伝達は、駆動要素が、移動ユニットと共に移動する取り付け要素に取り付けられる場合に、全く無視されることができる。この場合において、駆動モータは、取り付け要素が移動ユニット上に取り付けられる場合又は移動ユニットに取り付けられる場合に、移動ユニットと完全に一体化されることができる。その場合において、駆動ユニットは、好ましくは、一方では駆動モータと係合して駆動し、他方では、フレーム又は、第1のコンベア及び/又は第2のコンベアのいずれかと係合して駆動する伝達装置を備える。前記係合は、例えば、固定の環状のギアを係合する駆動モータのギアと共に、摩擦によって又はギアを介して影響を与えることができるが、隣接する第1のコンベア及び/又は第2のコンベアとの係合を通じて移動ユニットを駆動することも可能である。
【0005】
バッファーコンベアの変形実施形態において、運搬経路が垂直軸の周囲に巻き付き、一の端部で中央支柱に回転可能に接続され、他の端部で移動ユニットを駆動するために移動ユニットに接続されたアームを使用することが可能になる。駆動モータは、その場合にアーム内に取り付けられ、又はアームに取り付けられる場合があり、駆動し、且つアームの動きを少なくとも部分的に追従するためにそれに接続される場合がある。
【0006】
運搬経路が、例えば、楕円形状の構成又は水平方向螺旋状(渦巻き(volute))の構成などの支柱に対して非同心円状に延在する場合、アームには、好ましくは、移動ユニットと支柱との間の変化する距離にアームを適合するための手段が設けられる。
【0007】
前記経路が水平面で湾曲するだけでなく、垂直方向に少なくとも部分的に延在する場合に、任意の場合における駆動モータが移動ユニットの垂直方向の動きを追従することが好ましい。
【0008】
少なくとも部分的に移動ユニットと共に移動する駆動モータは、例えば、バッテリーなどの移動ユニットと共に移動するエネルギー源、又は滑り接触、移動ユニット又は同様のものと共に移動するケーブルを介して固定のエネルギー源に接続されることができる。固定の制御ユニットと移動ユニット上の制御ユニットとの間のデータ通信は、例えば、無線信号を介して行われ、又は誘導を通じて行われる。
【0009】
移動ユニットの駆動ユニットが第1のコンベア及び第2のコンベアの速度を独立して操作する場合に、バッファーコンベアには、好ましくは、前記速度を測定するためのセンサー、及び測定された速度に応じて移動ユニットの駆動ユニットを制御するための制御ユニットが設けられる。前記センサーは、固定の位置で配置されることができるが、前記センサーは、移動ユニットに接続されることもでき、この場合において、移動ユニットの速度に対する第1のコンベア速度及び第2のコンベア速度は、測定される。
【0010】
本発明は図面を参照してより詳細に説明され、その図面において本発明によるバッファーコンベアの複数の実施形態が非常に概略的に図示される
【発明を実施するための最良の形態】
【0011】
図面は、製品を運搬し、且つ製品をバッファするためのバッファーコンベアを示す。そのようなバッファは通常、生産ラインで行われ、製品が異なる位置で異なる加工ステップ又は異なる処理ステップを受け、且つそれらの位置でプロセス速度の一時的な差異が補償されなければならない生産ラインで行われる。製品は、容器、例えば特にボトル、缶、ポット、カートン、及び同様のものからなるが、タバコ、箱、ケース、又は考えうる同様のものなどの様々な他の小包物品からなる場合がある。ボトル又はカートンの場合において、加工ラインは、ボトルに飲料を充填する瓶詰めラインなどの、議論されている容器に充填するための充填ラインからなる。バッファーコンベアは、例えば、デパレタイザーステーション(depalletising station)と洗浄及び/又は充填ステーションの間、充填ステーションとラベル貼りステーションとの間、又は、ラベル貼りステーションと詰め込みステーションとの間に配置されることができる。他の用途もまた、もちろん考えうる。
【0012】
図示されたバッファーコンベアは、フレームを備え、この場合において、ベース2及び螺旋状の案内シュート3を有する中央支柱1が設けられ、螺旋状の案内シュート3が中央支柱の周りに延在し、且つ中央支柱に取り付けられるフレームを備える。全ての種類の他のフレームの構造は、もちろん考慮される。端部ローラーは、案内シュートの下端4及び上端5に取り付けられ、且つ、フレームの戻りシュート6は螺旋状の案内シュート3の端部の間に延在する。本発明によるバッファーコンベアのこの実施形態において、案内シュート3及び戻りシュート6は、第1の細長いコンベア7及び第2の細長いコンベア8を支持し、例えば、互いに隣接して延在する1つ又は複数の運搬ベルトがそれぞれ設けられる場合がある。2つのコンベア7、8の運搬部分及び戻り部分は、異なる経路に沿って移動する。戻り部分が、運搬部分のために案内シュート3の下側に沿って導かれる実施形態を使用することもまた、考えられる。
【0013】
第1のコンベア7及び第2のコンベア8の様々な実施形態は、(好ましくは)多少の閉鎖された運搬表面が得られる限り、可能である。そのようなコンベアの例は、スラットコンベア(slat conveyors)、リンクコンベア、ステンレス鋼のチェーンコンベア、繊維ベルトコンベア、ポリ塩化ビニール(PVC)のベルトコンベア、スチールのベルトコンベア、及び同様のものであり、その例示の種類は一般的に、直線状のコンベアで使用するだけのために適切であり、すなわち、非湾曲コンベアである。本発明もまた、直線状のコンベアに延在し、しかしながら、水平面内のみに湾曲されたコンベアに延在し、垂直方向に延在するコンベアに延在し、及びエンドレスコンベアとして構成されておらず、例えばローラコンベアとして又は空気コンベア又は磁気コンベアとして構成されたコンベアに延在する。
【0014】
図1に示された実施形態において、螺旋状のシュート3は、8つの巻き付け(winding)を備えるが、議論されている用途に依存して、より多い数又はより少ない数の巻き付けを使用することもできる。例えば、コンベア7、8上のガイドローラーの使用は、任意の駆動問題を引き起こすことなく、多数の巻き付けの上にコンベアを駆動することを可能にさせる。2つのコンベア7、8は、それらの駆動モータ9、10をそれぞれ有し、それら自体の駆動モータは、この場合において上端ローラー5に隣接して取り付けられ、関連されたコンベアベルト7,8を駆動する。2つのコンベアもまた、供給コンベア又は排出コンベアに接続され、それ故に、駆動され、且つ前記コンベアによって制御されることができる。
【0015】
図1A−図1Cの2つのコンベア7、8(それぞれが、図面に示された実施形態において2つのコンベアベルトを備える。)は、この場合における反対方向に、互いに独立して駆動されることができ、すなわち、製品が、矢印P1によって示されるように、下端4で供給端部から第1のコンベアベルト7の運搬表面上を上方に向けて運搬され、且つ下端4で排出端部に向けて、(矢印P2に示されるように)第2のコンベアベルト8の運搬面の上を再び下方に向けて運搬される。矢印P1、P2によって示された位置で、製品は、移動ユニット11によって第1のコンベアベルト7の運搬表面から第2のコンベアベルト8の運搬表面まで移動される。
【0016】
移動ユニット11は、バッファーコンベア内で移動可能であり、第1のコンベアと第2のコンベアとの間の空間で案内される。移動ユニット11の位置は、バッファーコンベアの供給端部と排出端部との間の所望されるバッファ能力に依存する。第1のコンベア7の供給割合が第2のコンベア8の排出割合より高い場合、供給されている超過の製品は、バッファーコンベア内にバッファされなければならない、且つ移動ユニット11は、バッファーコンベア上のより多くの製品を集めるように、その場合において、バッファーコンベアの供給端部から離れて移動しなければならない。他の場合において、第1のコンベア7の供給割合が第2のコンベア8の排出割合より低い場合、移動ユニット11は、排出端部にバッファされた製品を供給するように、排出端部の方向に移動しなければならない。実際には、バッファーコンベアは、例えば、バッファ時間の5〜15分で十分である多数の製品をバッファすることができ、例えば、その期間が供給割合と排出割合との間のバランスを回復するために一般的に十分である。
【0017】
移動ユニット11には、バッファーコンベア内の移動ユニット11の位置変化に影響を与えるための駆動ユニットが設けられ、その駆動ユニットは、好ましくは、第1のコンベア7及び第2のコンベア8の速度に依存して操作する。移動ユニット11のための前記駆動ユニットは、駆動モータ12を備え、その駆動モータ12は、少なくとも部分的に移動ユニットの動きを追従する。
【0018】
本明細書のこの部分以降に議論される図1D及び図2から図22は、様々な方法で駆動されることができる移動ユニット11が設けられたバッファーコンベアの様々な実施形態を備える。
【0019】
図1Dは、図1によるバッファーコンベアを示し、図1Dでは、第1のコンベア7と、第2のコンベア8と、駆動モータ11が設けられる移動ユニット11とは、区別されることができる。この実施形態には、駆動モータ12は、取り付け部分13に取り付けられ、この取り付け部分13は、コンベア7、8の湾曲が、移動ユニットが移動することができるその経路に沿って、例えば直線状の部分及び湾曲された部分を備える経路で変化するかどうかという事実に依存して、移動ユニット11に固定可能又は移動可能のどちらかで接続される移動ユニット11及び取り付け部分13は、この場合において、互いに対して少なくとも略垂直軸に関して回転することができる。この方法において、駆動モータ12は、第1のコンベア7及び第2のコンベア8が、前記部分の湾曲における変化の場合、互いに平行に延在する部分の形状にその位置を適合することができる。これは、例えば電気モータからなる場合がある駆動モータ12が、固定部分、この場合において伝達装置14のピニオン16と係合するリングギア15、を有する伝達装置14を介して係合する状態にある場合に、特に重要である。取り付け部分13が移動ユニット11に対して移動することができる場合、ピニオン16がリングギア15と係合する位置は、重要ではない。図示された場合において、駆動モータ12は、水平の回転軸を有し、それによって、伝達装置14は、ピニオン16の回転の横方向に延在している軸にもかかわらず、同様の水平方向に対して垂直に延在する。
【0020】
互いに係合される歯付きのピニオン16及びリングギア15を有するよりはむしろ、コンベア7及び8の経路に沿って延在するホイールとトラックとの摩擦性の接触を使用することもまた、可能である。移動ユニット11は、移動装置17と、第1のコンベア7から第2のコンベア8まで移動するための移動要素18とを備える。この場合の移動装置17は、駆動されたベルトを備え、この駆動されたベルト自体は、例えば、優先権書類から周知であり、その内容は、参照によって、本明細書に組み込まれる。移動装置18の可能な構成は、優先権書類に示される。移動装置17及び移動要素18は、第1のコンベアから第2のコンベアへ製品を移動することを可能にし、その目的のために、それらの2つのコンベアの間で固定される。他の実施形態をさらに参照してより詳細に説明されるように、優先権書類に示された方法に比べて、2つの部分を駆動する様々なほかの方法がある。
【0021】
図2の実施形態において、駆動モータ12は、移動ユニット11に直接的に回転可能に取り付けられる。伝達装置14のピニオン16には歯が設けられていようといまいと、伝達装置14のピニオン16は、この場合固定のリングギア又はトラックと係合するのではなく、コンベア7、8のうちの一のコンベア(この場合、コンベア8)と係合し、それによってコンベア7、8のうちの一のコンベアに対する移動は直接的に影響される。
【0022】
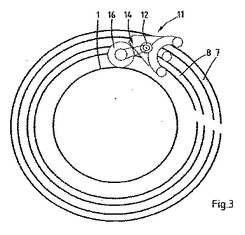
図3は、駆動モータ12が、少なくとも略垂直に延在するその回転軸と共に、移動ユニット11に直接的に取り付けられる実施形態を示す。駆動モータは、この場合駆動ベルトとして構成される、伝達装置14を介してギア又は摩擦調車(friction wheel)16に駆動可能に取り付けられ、このギア又は摩擦調車16は、少なくとも略垂直方向の軸に関して同様に回転可能であり、且つこの場合、大きい直径を有する中央支柱1の外側と係合する。
【0023】
図4は、バッファーコンベアの変形実施形態を示し、この変形実施形態は、移動ユニット11がアーム19を介して駆動され、アーム19は、一端で支柱1に回転可能に接続され、他端で又は他端に隣接して移動ユニット11に駆動可能に接続される。垂直方向に移動する移動ユニット11の場合において、アーム19は、螺旋状の経路に沿ってその移動中に移動ユニット11と同一の高さで留まる方法で、支柱1に対して垂直方向に移動可能である。アーム19は、別個の駆動機構を介して、垂直方向に移動されることができるが、例えば、この実施形態において、(このケースの場合)コンベア7、8の螺旋状の経路によって形成されたスクリュー(screw)を介して移動される。アーム19は、その目的のために、ホイール20を介して第1のコンベア7上に支持される。駆動モータ12の外部シャフト上のギアは、中央支柱1に接続される遊星歯車又はリングギア15と係合しており、それに対して垂直方向の移動の可能にするが回転に対して固定されている。
【0024】
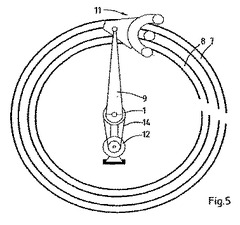
図5は、先の実施形態の変形実施形態を示し、駆動モータ12は、どちらも、アーム19上に取り付けられておらず、アーム19と共に回転せず、支柱に対して垂直方向の移動を可能にするが回転に対して固定されるように支柱1に固定して接続される駆動モータ12は、この目的のために、例えば、アーム19に接続された滑り軸受を介して垂直方向に案内されることができる。
【0025】
図5Aは、図4の実施形態の他の変形実施形態を示し、アーム19は、垂直方向に移動可能ではなく、第1のコンベア7の外周を越えて突出して、(又は、第2のコンベアベルト8の内周の内側に留まって、)螺旋状に延在するコンベア7、8の最上の巻き付けの上に延在する、又は最下の巻き付けの下に延在する。アーム19及び移動ユニット11は、この場合において、接続要素21を介して相互接続され、この接続要素21は、アーム19と移動ユニット11との間の高さにおける差異を補償するように、長さを変化することができる。駆動モータ12の位置は、この場合において、アーム19であるけれども。図4に示される位置に同等であり、それ故に、駆動モータ11が回転移動のみ可能であり、支柱1に対して並進移動が可能ではない。
【0026】
図6は、図4の他の変形実施形態を示し、コンベア7及び8は、螺旋状の経路で再び延在し、しかしながら、円形ではなく、むしろ楕円形ベース形状を有する。これは、第1の位置で、コンベア7及び8の湾曲部が運搬経路に沿って変更することを暗示し、移動ユニット11と支柱1との間の水平方向の空間が運搬経路の長さに沿って変更することを暗示する。アーム19は、この目的のために、移動ユニット11と支柱1との間の変化する空間にアームを適合することが可能である手段が設けられ、その手段は、この実施形態では伸縮自在のアーム22を備える。前記伸縮自在のアーム22は、例えば、垂直方向のヒンジ23を介して、アーム22及び移動ユニット11が少なくとも略垂直方向の軸に関して互いに対して回動することが可能である方法で、移動ユニット11に接続される。
【0027】
図7は、図1Dの実施形態の変形実施形態を示し、主な差異は、螺旋状の経路が楕円形のベース形状を有し、取り付け要素13に取り付けられた駆動モータ12を有する取り付け要素13は、少なくとも略垂直方向のヒンジ24を介して移動ユニット11に接続される。
【0028】
図8は、図4の実施形態の他の変形実施形態を示し、駆動モータ12は、駆動モータ12が駆動ベルト25及びプーリーを介して支柱1に接続されると共に、駆動モータの回転軸が垂直方向に延在する方法で、アーム19上に取り付けられる。前記プーリーは、順々に支柱1に接続され、回転に対して固定されるが、支柱に対して垂直方向に調節可能である。
【0029】
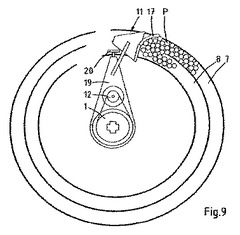
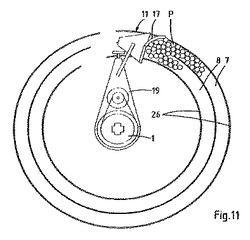
図9は、図8の実施形態の変形実施形態を示し、移動ユニット11は大量の流れ(mass flow)で運搬されている製品Pを移動するために適合されている。円形の断面を有する製品は、この場合、ボトル、ポット、又は同様のものなどに関連される。この場合において、(それぞれ複数の並んでいるコンベアベルトからなる場合もある)第1のコンベア7と第2のコンベア8との間の任意の間隙がほとんど存在せず、それによって、製品は、第1のコンベア7から第2のコンベア8へ直接的に移動されることができる。移動ユニット11の移動装置17は、単純で移動不可能なガイドからなり、このガイドは、第2のコンベア8に横方向において移動要素18のガイドと接触する状態になる製品を移動する機能を果たす。移動装置17のガイドは、この場合において、前記移動を効果的に支援するように移動されることもできる。
【0030】
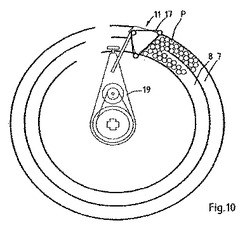
図10は、製品に面する側で、第1のコンベア7から第2のコンベア8へ移動する移動ベルトを循環する形態で、移動可能な移動装置17を備える変形実施形態を示す。
【0031】
図11は、図9の実施形態の変形実施形態を示し、ガイド26はコンベア7、8に取り付けられ、それ故に、製品を案内するためにその半径方向の外側及び半径方向の内側のそれぞれで、ガイド26に沿って移動する。
【0032】
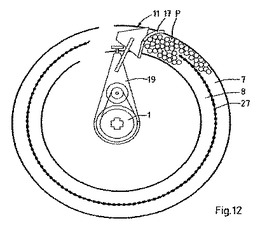
図12は、図9の実施形態の他の変形実施形態を示し、第1のコンベア7及び第2のコンベア8に平行に延在している中央ガイド27は、第1のコンベアと第2のコンベアとの間に設けられる。前記中央ガイド27は、移動ユニット11の動きを追従する。中央ガイド27は、その目的のために、移動ユニット11に結合され、移動ユニット11と同時に駆動される。移動装置17に面する中央ガイド27の端部は、そこから固定の距離で離間され、それによって、中央ガイド27と移動装置17との間の空間に存在する製品Pは、第1のコンベア7から第2のコンベア8に移動されることができる。中央ガイド27は、第1のコンベア7と第2のコンベア8との間の小さな間隙内に配置される場合があり、又は、第1のコンベアベルト7及び第2のコンベアベルト8の上に取り付けられガイドから吊るされる場合もある。
【0033】
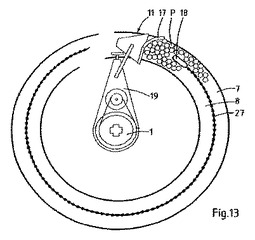
図13に示された変形実施形態において、移動要素18は、移動装置17に面する中央ガイド27の端部に取り付けられる。前記アクティブな移動装置17は、製品Pを移動することを支援する。移動要素18は、この目的のために、1つ又は複数の垂直方向の軸に関して回転可能であり、それによって、ある種の推進器(propeller)が得られ、移動要素18の偏心往復移動(いわゆる、“揺動ユニット(wagging unit)”)が考慮される。さらなる変形実施形態が可能である。
【0034】
図14に示された変形実施形態において、中央ガイド27には、移動要素18が設けられ、この移動要素18は、アクティブな要素であろうとなかろうと、アクティブな移動装置17と組み合わされ、この場合において、循環する移動装置17と組み合わされる。この変形実施形態において、中央ガイド27は、第1のコンベア7と第2のコンベア8との間に配置され、それ故に、形成された間隙には、移動装置17と移動要素18との間の領域で可撓性を有するブリッジ要素が設けられる。ブリッジ要素の上面は、第1のコンベア7及び第2のコンベア8の運搬表面と同一の面内に載置し、それによって、製品は、第1のコンベア7から第2のコンベア8へ可撓性を有するブリッジ要素28を介して移動されることができる。ブリッジ要素28は、中央ガイド27と一体化される場合があり、又は別個の要素からなる場合もある。ブリッジ要素28は、運搬経路の少なくとも一部に沿って、移動ユニット11の移動を追従するために、移動ユニット11又は中央ガイド27のどちらかに接続される。
【0035】
図15は、図10に示された実施形態の変形実施形態を示し、第1のコンベア7及び第2のコンベア8は、僅かな距離で離間され、固定のブリッジ要素29は、コンベアの間の僅かな間隙内に配置され、そのブリッジ要素は、運搬経路に平行に、運搬経路の少なくとも一部に沿って延在する。ブリッジ要素29の表面は、第1のコンベア7及び第2のコンベア8の運搬表面と少なくとも略同一の面に順番に載置される。この場合において、移動ユニット11に隣接して存在する製品は、第1のコンベア7から第2のコンベア8へ、固定のブリッジ要素29を介して移動する。
【0036】
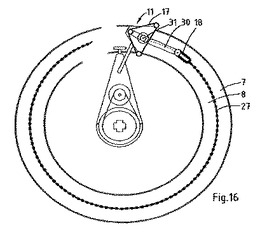
図16は、図14に示された実施形態の変形実施形態の図であり、アクティブな移動要素18が駆動されることができる方法を示す。この場合において、移動要素18は、駆動手段31によって駆動ベルト30を介して駆動される。前記駆動手段31は、例えば、差異を介して、第1のコンベア7と第2のコンベア8との間の速度の差に応じて駆動されるために、駆動モータである場合があり、2つのコンベア7,8に接続される場合がある。駆動装置31もまた、コンベア7,8の一方によって駆動される場合がある。駆動手段31もまた、移動装置17を駆動するために使用される。
【0037】
図17は、図4の実施形態に対応する実施形態の図であり、その移動装置17を駆動するための駆動手段31が示されている。移動装置17の駆動ベルトは、この目的のために、駆動手段31の上方で通過される。
【0038】
図18は、この実施形態において、駆動手段31がまた、移動装置17の反対側に配置された移動要素18を駆動するために使用されることもできることを示す。
【0039】
図19は、移動ユニット11のための駆動モータ12が制御され得る方法を示す。図19は、制御ユニット32を示し、この制御ユニット32は、一方では駆動モータ12に接続され、他方ではセンサー33に接続される。このセンサー33は、その運搬ベルトで、又はその駆動ギアを介して、第1のコンベア7及び第2のコンベア8の速度を測定する。センサー33によって行われた検出に基づいて、制御ユニットは、駆動モータ12のために所望される速度を計算する。これは、第1のコンベア7と第2のコンベア8との間の速度における差異、及び、場合により(変化する)要素が役割を果たす計算式に基づいて起こる。
【0040】
図20に示されるように、制御ユニット34はまた、移動手段17及び移動要素18のために、駆動手段31及び、この場合において移動モータに接続される場合もある。前記駆動手段31はまた、センサー33から得られた情報に基づいて制御される場合がある。駆動モータ12及び31を関連するエネルギー源、特に電力手段に接続するために、使用は、コンベア7及びコンベア8の経路に略平行に延在する滑り接触(sliding contact)からなる場合があるが、例えば、駆動モータ12,13に支柱1から延在しているケーブルと共に、回転接続(rotary connection)の使用することが可能である。制御ユニット32と駆動モータ12及び31との間の接続は、同一の方法で又は、例えば電波信号を介して、又は、誘導を通じて、起こる場合がある。
【0041】
図20Aは、第1のコンベア7及び第2のコンベア8が供給コンベア34及び排出ベルト35に接続され、供給コンベア34及び排出ベルト35が、この実施形態において一体である実施形態を示す。センサー36及び37は、供給コンベア34及び排出コンベア35上に存在する製品の量(供給又は排出されていない、十分に供給又は排出されている、又は、過剰に供給又は排出されているなど)を測定する。制御ユニット32は、測定データに基づいて、第1のコンベア7及び第2のコンベア8の駆動モータ9、10、移動ユニット11の駆動モータ12、及び/又は(部分的に)移動ユニット17の駆動手段31を制御する。
【0042】
図20Bにおいて、供給コンベア34及び排出コンベア35は接続されておらず、制御ユニット32はまた、先のプロセス又は次のプロセスに輸送を適合するように、互いにシステム内の様々なコンベアリンクを最適に連動して、供給コンベア34及び排出コンベア35のモータ38及びモータ39を制御し、さらに、ラインにおける加工プロセス又は処理プロセスを監視される。
【0043】
図21に示される変形実施形態において、制御ユニット32及びセンサー33は、移動ユニット11上に取り付けられる、又は移動ユニット11に取り付けられる。それによって、連通及び接続は、かなり単純化される。エネルギー源が同様にバッテリーの形態である場合、移動ユニット11は独立して機能することができる。この場合において、センサー33は、コンベア7、8の絶対速度を測定しないが、移動ユニット11に対するその速度を測定し、移動ユニット11の要求される速度は、前記測定に基づいて計算されることができる。
【0044】
図22は、移動ユニット11の他の変形実施形態を示し、製品の形状のために、特に、例えば大きい製品Pを移動するように意図され、連続的に循環された移動ユニットによって移動されることができない。図示された実施形態において、「フラップベルト」型のプッシャーは、移動装置17として使用されるが、ロッドプッシャー又は同様のものを使用することもできる。どちらの場合において、移動ユニット17は、不連続なストロークを行い、そのようなストロークは、センサーが移動装置17に近接して製品の存在を検出する場合に、のみ行われる。移動装置17は、次いで、転化運動を行い、プッシャーを移動するための循環ベルトを使用させる図示された実施形態において、移動装置は、次の製品Pを移動するために直接的に用意されることができる。移動装置のストロークは、トレーシングシステムから知られるように、コンピュータ計算によって、開始される場合もある。
【0045】
前述から、本発明がバッファーコンベアを提供し、様々な方法で具現化され、製品の移動の多目的に使用可能である方法を提供することが明白になる。移動ユニットの駆動は、議論されている用途に容易に適合されることができる。所望される場合に、様々な実施形態は、組み合わされることができ、それによって、一の実施形態の特定の特徴が他の実施形態にまとめられることもできる。
【図面の簡単な説明】
【0046】
【図1】本発明によるコンベアの第1の実施形態の非常に概略的な側面図である。
【図1A】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1B】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1C】移動ユニットを移動することによって認識されたバッファ容量の変形実施形態を示す、図1のバッファーコンベアの縮小上面図である。
【図1D】本発明に関する移動ユニットの第1の実施形態を有するバッファーコンベアのウィンディングの拡大図である。
【図2】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図3】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図4】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図5】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図5A】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図6】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図7】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図8】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図9】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図10】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図11】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図12】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図13】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図14】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図15】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図16】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図17】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図18】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図19】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20A】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図20B】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図21】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【図22】本発明のバッファーコンベアのさらなる実施形態の図1Dに対応する概略図である。
【符号の説明】
【0047】
1 中央支柱
2 ベース
3 螺旋状の案内シュート
4 下端
5 上端
6 戻りシュート
7 第1の細長いコンベア
8 第2の細長いコンベア
9 駆動モータ
10 駆動モータ
11 移動ユニット
12 駆動モータ
13 取り付け部分
14 伝達装置
15 リングギア
16 ピニオン
17 移動ユニット
18 移動要素
19 アーム
20 ホイール
21 接続要素
22 アーム
23 垂直方向のヒンジ
24 垂直方向のヒンジ
25 駆動ベルト
26 ガイド
27 中央ガイド
28 ブリッジ要素
29 静止状態のブリッジ要素
30 駆動ベルト
31 駆動手段
32 制御ユニット
33 センサー
34 供給コンベア
35 排出コンベア
36 センサー
37 センサー
38 モータ
39 モータ
P 製品
P1 矢印
P2 矢印
【特許請求の範囲】
【請求項1】
製品を運搬し、且つ前記製品をバッファするためのバッファーコンベアであって、
少なくとも1つの第1の細長いコンベアにおいて、第1の方向に駆動されることができ、且つ供給端部を有する前記第1の細長いコンベアと、
第2の反対方向に駆動されることができ、且つ排出端部を有する第2の細長いコンベアにおいて、前記第1のコンベア及び前記第2のコンベアが互いに少なくとも略平行であり、且つ互いに隣接する経路に延在する前記第2の細長いコンベアと、
移動ユニットであって、前記第1のコンベア及び前記第2のコンベアに少なくとも略平行に移動可能であり、且つ前記第1のコンベアから前記第2のコンベアへ前記製品を移動するための移動手段が設けられ、好ましくは、前記第1のコンベア及び前記第2のコンベアの速度に応じて、前記移動ユニットを移動するための駆動ユニットを備える前記移動ユニットと、を備えているバッファーコンベアにおいて、
前記移動ユニットの前記駆動ユニットは、駆動モータを備え、前記駆動モータは、少なくとも部分的に前記移動ユニットの動きを追従することを特徴とするバッファーコンベア。
【請求項2】
前記駆動モータは、前記移動ユニットと共に移動する駆動要素に取り付けられることを特徴とする請求項1に記載のバッファーコンベア。
【請求項3】
前記取り付け要素は、前記移動ユニット上に取り付けられる、又は前記移動ユニットに取り付けられることを特徴とする請求項1又は請求項2に記載のバッファーコンベア。
【請求項4】
前記駆動ユニットは、伝達装置を備え、前記伝達装置は、一方では駆動モータと駆動状態で係合され、他方では、フレーム、又は前記第1のコンベア及び/又は前記第2のコンベアのいずれかに駆動状態で係合されていることを特徴とする請求項1〜3のいずれか一項に記載のバッファーコンベア。
【請求項5】
前記運搬経路は、垂直方向の支柱の周りに巻き付き、アームが、前記垂直方向の支柱に接続され、前記アームは、一端で前記支柱に回動可能に接続され、他端で前記移動ユニットに接続されることを特徴とする請求項1〜4のいずれか一項に記載のバッファーコンベア。
【請求項6】
前記駆動モータは、前記アームに接続され、好ましくは、前記アーム上に取り付けられ、且つ前記支柱に駆動可能に係合されていることを特徴とする請求項5に記載のバッファーコンベア。
【請求項7】
前記運搬経路は、前記支柱に対して非同心状に延在し、前記アームには、前記移動ユニットと前記支柱との間の変化する距離に前記アームを適合するための手段が設けられていることを特徴とする請求項5又は請求項6に記載のバッファーコンベア。
【請求項8】
前記経路は、水平面において少なくとも湾曲し、好ましくは、垂直方向に少なくとも部分的に延在していることを特徴とする請求項1〜7のいずれか一項に記載のバッファーコンベア。
【請求項9】
前記経路は、渦巻状に湾曲されている、又は螺旋状に湾曲されている請求項7又は請求項8に記載のバッファーコンベア。
【請求項10】
前記経路は、前記経路の長さに沿って変化する湾曲部を備えていることを特徴とする請求項8又は請求項9に記載のバッファーコンベア。
【請求項11】
前記運搬経路は、垂直方向に延在し、前記駆動モータは、前記移動ユニットの垂直方向の動きに追従する方法で、前記移動ユニットに接続されていることを特徴とする請求項1〜10のいずれか一項に記載のバッファーコンベア。
【請求項12】
前記第1のコンベア及び前記第2のコンベアは、前記第1のコンベアと前記第2のコンベアとの間の水平方向の間隙を有する前記経路で延在し、前記移動ユニットは、前記製品が前記移動ユニットを介して前記第1のコンベアから前記第2のコンベアへ移動される方法で、前記間隙内のガイド上に案内されていることを特徴とする請求項1〜11のいずれか一項に記載のバッファーコンベア。
【請求項13】
前記第1のコンベア及び前記第2のコンベアは、前記製品が、前記移動ユニットによって、前記第1のコンベアから前記第2のコンベアへ直接的に移動される方法で、前記第1のコンベアと前記第2のコンベアとの間の間隙を有することなく、前記経路内に延在していることを特徴とする請求項1〜11のいずれか一項に記載のバッファーコンベア。
【請求項14】
中央ガイドは、前記第1のコンベアと前記第2のコンベアとの間に設けられる、又は前記第1のコンベアと前記第2のコンベアとの間の遷移部の上方に設けられ、前記中央ガイドは、前記移動ユニットの動きに連接され、前記移動ユニットの移動装置からある程度の距離を離隔した点で終端していることを特徴とする請求項13に記載のバッファーコンベア。
【請求項15】
移動要素は、前記移動ユニットの前記移動装置の方向に面する、前記中央ガイドの端部に取り付けられ、前記移動要素は、前記第1のコンベアから前記第2のコンベアへ前記製品を移動する目的のために駆動されることができることを特徴とする請求項14に記載のバッファーコンベア。
【請求項16】
前記移動装置は、駆動されることができ、例えば前記移動ユニットに接続された駆動手段によって駆動されていることができることを特徴とする請求項1〜15のいずれか一項に記載のバッファーコンベア。
【請求項17】
前記移動要素及び前記移動装置は、同一の駆動手段によって駆動されていることを特徴とする請求項15又は請求項16に記載のバッファーコンベア。
【請求項18】
前記移動ユニットは、前記第1のコンベア及び前記第2のコンベアの速度に依存して駆動され、前記バッファーコンベアには、前記第1のコンベア及び前記第2のコンベアの端部に、前記速度を測定するためのセンサーが設けられ、且つ測定された速度に基づいて、前記移動ユニットが駆動される方法を制御するための制御ユニットが設けられていることを特徴とする請求項1〜17のいずれか一項に記載のバッファーコンベア。
【請求項19】
前記センサーは、前記移動ユニットに接続されており、前記移動ユニットの速度に対して前記第1のコンベア及び前記第2のコンベアの速度を測定していることを特徴とする請求項18に記載のバッファーコンベア。
【請求項20】
前記移動ユニットと共に少なくとも部分的に移動する前記駆動モータは、前記移動ユニットと共に移動する、エネルギー源、例えばバッテリーに接続され、又は、滑り接触を介して静止のエネルギー源に接続され、それら又はそれらと同様のものと共に移動するケーブルに接続されていることを特徴とする請求項1〜19のいずれか一項に記載のバッファーコンベア。
【請求項1】
製品を運搬し、且つ前記製品をバッファするためのバッファーコンベアであって、
少なくとも1つの第1の細長いコンベアにおいて、第1の方向に駆動されることができ、且つ供給端部を有する前記第1の細長いコンベアと、
第2の反対方向に駆動されることができ、且つ排出端部を有する第2の細長いコンベアにおいて、前記第1のコンベア及び前記第2のコンベアが互いに少なくとも略平行であり、且つ互いに隣接する経路に延在する前記第2の細長いコンベアと、
移動ユニットであって、前記第1のコンベア及び前記第2のコンベアに少なくとも略平行に移動可能であり、且つ前記第1のコンベアから前記第2のコンベアへ前記製品を移動するための移動手段が設けられ、好ましくは、前記第1のコンベア及び前記第2のコンベアの速度に応じて、前記移動ユニットを移動するための駆動ユニットを備える前記移動ユニットと、を備えているバッファーコンベアにおいて、
前記移動ユニットの前記駆動ユニットは、駆動モータを備え、前記駆動モータは、少なくとも部分的に前記移動ユニットの動きを追従することを特徴とするバッファーコンベア。
【請求項2】
前記駆動モータは、前記移動ユニットと共に移動する駆動要素に取り付けられることを特徴とする請求項1に記載のバッファーコンベア。
【請求項3】
前記取り付け要素は、前記移動ユニット上に取り付けられる、又は前記移動ユニットに取り付けられることを特徴とする請求項1又は請求項2に記載のバッファーコンベア。
【請求項4】
前記駆動ユニットは、伝達装置を備え、前記伝達装置は、一方では駆動モータと駆動状態で係合され、他方では、フレーム、又は前記第1のコンベア及び/又は前記第2のコンベアのいずれかに駆動状態で係合されていることを特徴とする請求項1〜3のいずれか一項に記載のバッファーコンベア。
【請求項5】
前記運搬経路は、垂直方向の支柱の周りに巻き付き、アームが、前記垂直方向の支柱に接続され、前記アームは、一端で前記支柱に回動可能に接続され、他端で前記移動ユニットに接続されることを特徴とする請求項1〜4のいずれか一項に記載のバッファーコンベア。
【請求項6】
前記駆動モータは、前記アームに接続され、好ましくは、前記アーム上に取り付けられ、且つ前記支柱に駆動可能に係合されていることを特徴とする請求項5に記載のバッファーコンベア。
【請求項7】
前記運搬経路は、前記支柱に対して非同心状に延在し、前記アームには、前記移動ユニットと前記支柱との間の変化する距離に前記アームを適合するための手段が設けられていることを特徴とする請求項5又は請求項6に記載のバッファーコンベア。
【請求項8】
前記経路は、水平面において少なくとも湾曲し、好ましくは、垂直方向に少なくとも部分的に延在していることを特徴とする請求項1〜7のいずれか一項に記載のバッファーコンベア。
【請求項9】
前記経路は、渦巻状に湾曲されている、又は螺旋状に湾曲されている請求項7又は請求項8に記載のバッファーコンベア。
【請求項10】
前記経路は、前記経路の長さに沿って変化する湾曲部を備えていることを特徴とする請求項8又は請求項9に記載のバッファーコンベア。
【請求項11】
前記運搬経路は、垂直方向に延在し、前記駆動モータは、前記移動ユニットの垂直方向の動きに追従する方法で、前記移動ユニットに接続されていることを特徴とする請求項1〜10のいずれか一項に記載のバッファーコンベア。
【請求項12】
前記第1のコンベア及び前記第2のコンベアは、前記第1のコンベアと前記第2のコンベアとの間の水平方向の間隙を有する前記経路で延在し、前記移動ユニットは、前記製品が前記移動ユニットを介して前記第1のコンベアから前記第2のコンベアへ移動される方法で、前記間隙内のガイド上に案内されていることを特徴とする請求項1〜11のいずれか一項に記載のバッファーコンベア。
【請求項13】
前記第1のコンベア及び前記第2のコンベアは、前記製品が、前記移動ユニットによって、前記第1のコンベアから前記第2のコンベアへ直接的に移動される方法で、前記第1のコンベアと前記第2のコンベアとの間の間隙を有することなく、前記経路内に延在していることを特徴とする請求項1〜11のいずれか一項に記載のバッファーコンベア。
【請求項14】
中央ガイドは、前記第1のコンベアと前記第2のコンベアとの間に設けられる、又は前記第1のコンベアと前記第2のコンベアとの間の遷移部の上方に設けられ、前記中央ガイドは、前記移動ユニットの動きに連接され、前記移動ユニットの移動装置からある程度の距離を離隔した点で終端していることを特徴とする請求項13に記載のバッファーコンベア。
【請求項15】
移動要素は、前記移動ユニットの前記移動装置の方向に面する、前記中央ガイドの端部に取り付けられ、前記移動要素は、前記第1のコンベアから前記第2のコンベアへ前記製品を移動する目的のために駆動されることができることを特徴とする請求項14に記載のバッファーコンベア。
【請求項16】
前記移動装置は、駆動されることができ、例えば前記移動ユニットに接続された駆動手段によって駆動されていることができることを特徴とする請求項1〜15のいずれか一項に記載のバッファーコンベア。
【請求項17】
前記移動要素及び前記移動装置は、同一の駆動手段によって駆動されていることを特徴とする請求項15又は請求項16に記載のバッファーコンベア。
【請求項18】
前記移動ユニットは、前記第1のコンベア及び前記第2のコンベアの速度に依存して駆動され、前記バッファーコンベアには、前記第1のコンベア及び前記第2のコンベアの端部に、前記速度を測定するためのセンサーが設けられ、且つ測定された速度に基づいて、前記移動ユニットが駆動される方法を制御するための制御ユニットが設けられていることを特徴とする請求項1〜17のいずれか一項に記載のバッファーコンベア。
【請求項19】
前記センサーは、前記移動ユニットに接続されており、前記移動ユニットの速度に対して前記第1のコンベア及び前記第2のコンベアの速度を測定していることを特徴とする請求項18に記載のバッファーコンベア。
【請求項20】
前記移動ユニットと共に少なくとも部分的に移動する前記駆動モータは、前記移動ユニットと共に移動する、エネルギー源、例えばバッテリーに接続され、又は、滑り接触を介して静止のエネルギー源に接続され、それら又はそれらと同様のものと共に移動するケーブルに接続されていることを特徴とする請求項1〜19のいずれか一項に記載のバッファーコンベア。
【図1】

【図1A】

【図1B】

【図1C】
【図1D】
【図2】
【図3】
【図4】

【図5】
【図5A】

【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】

【図16】
【図17】

【図18】
【図19】
【図20】
【図20A】
【図20B】

【図21】

【図22】

【図1A】
【図1B】
【図1C】
【図1D】
【図2】
【図3】
【図4】
【図5】
【図5A】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図20A】
【図20B】
【図21】
【図22】
【公表番号】特表2009−536601(P2009−536601A)
【公表日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2009−507605(P2009−507605)
【出願日】平成19年4月20日(2007.4.20)
【国際出願番号】PCT/NL2007/050174
【国際公開番号】WO2007/123401
【国際公開日】平成19年11月1日(2007.11.1)
【出願人】(508170586)
【Fターム(参考)】
【公表日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成19年4月20日(2007.4.20)
【国際出願番号】PCT/NL2007/050174
【国際公開番号】WO2007/123401
【国際公開日】平成19年11月1日(2007.11.1)
【出願人】(508170586)
【Fターム(参考)】
[ Back to top ]