
Fターム[3F081AA01]の内容
コンベア上の物品の姿勢制御 (7,432) | 物品 (965) | 定形物品 (957)
Fターム[3F081AA01]の下位に属するFターム
リング形状 (10)
円板状物品 (26)
円柱状物品 (100)
長尺物 (35)
板状物 (102)
球形 (8)
卵形 (12)
円錐形 (12)
カプセル形 (2)
コイル形(スプリング等) (1)
容器 (245)
電子部品(IC、ダイオード等) (46)
積層体 (15)
有頭物(ボルト、ビス等) (19)
ナット (6)
ボビン(管糸)
錠剤 (10)
C型鋼
原子燃料(ペレット)
たばこ (4)
自動車(ボディ、パネル等) (3)
台車、パレット (5)
瓦、タイル (1)
袋物(包装物) (61)
果実、野菜 (46)
加工食品(菓子、こんにゃく等) (48)
魚 (2)
Fターム[3F081AA01]に分類される特許
1 - 20 / 138
物品搬送装置
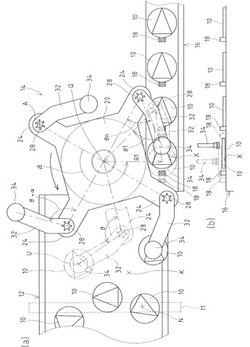
【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
物品搬送装置

【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
ワーク搬送装置
【課題】構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供する。
【解決手段】本ワーク搬送装置1は、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、搬送ライン2からのワークW1、W2が載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。
(もっと読む)
過剰供給抑制装置及びスクラップ破砕設備
【課題】破砕装置へのスクラップの過剰供給の発生を低減するのに好適な、過剰供給抑制装置及びスクラップ破砕設備を提供する。
【解決手段】過剰供給抑制装置100の平坦化部110は、下端側に、重り部34が装着された10個の摺り切り部材103と、重り部44が装着された9個の摺り切り部材105とを備える。摺り切り部材103と摺り切り部材105とは、エプロンコンベア7の積載面70の上方において、それぞれ全体が搬送方向に並設されると共に各摺り切り部材が搬送方向と直交する幅方向に並設される。各摺り切り部材の上端側は下端側が搬送方向に沿って独立して振り子運動可能なように軸支されると共に規制部材106,107によって振り子運動の範囲が規制される。更に、各摺り切り部材の各々の下端と積載面70との距離を予め設定された高さhとし、高さh以上に積み上げられたスクラップ部分を下端側において切り崩す。
(もっと読む)
フロア搬送装置における搬送物の姿勢を維持しつつ搬送方向を変換する機構
【課題】 搬送物の姿勢を維持しつつ搬送方向を変換させることによって、搬送物の向きを自在に調整できるとともに、省スペース化および省エネルギ化に資する搬送方向変換機構を提供する。
【解決手段】 走行体1は、本体部11の上部に立設された支柱用基軸14を備える。搬送物用支柱2は、支柱用基軸を延長するように、かつ、支柱用基軸の軸回りに回動自在に接続された支柱本体21と、この支柱本体から径方向に突出する位置に配置された二種類のガイドローラ群3,4とを備える。搬送レールLによる搬送経路の向きを変化させる範囲には、搬送レールに平行な状態で設けられ、かつ、上記二種類のガイドローラ群を個別に案内する二種類のガイドレールGL1,GL2を設ける。
(もっと読む)
コンベア装置、集合型ゾーンコントローラ、並びにゾーンコントローラ
【課題】搬送物を一まとめにすることが可能であり、且つモータとゾーンコントローラの必要個数を減少させることができるコンベア装置、集合型ゾーンコントローラ、並びにゾーンコントローラを提供することを課題とする。
【解決手段】コンベア装置120は、ゾーンAA〜ACが搬送方向に直列に配置されたものである。ゾーンAA〜ACは、集合型ゾーンコントローラ101で制御される。ゾーンAA〜ACは、各々通常のものよりも搬送ローラ5の本数が多く、全長Lが長いので、主たる搬送物を、間隔を開けて3個載置することができる。存荷センサーSa〜Scは、それぞれゾーンAA〜ACの最も末端の位置にある。集合型ゾーンコントローラ101では、複数の搬送物を適度の間隔を設けて一まとめにする動作を各ゾーンの在荷センサーSa〜Scの信号と、プログラム上のタイマーの組み合わせによって実現している。
(もっと読む)
ミンチの分割装置
【課題】帯状のミンチを搬送する変速コンベヤの終端部に、出退自在とされた受板が設けられ、受板上まで搬送されたミンチの先端部を所定の長さ毎に切断し、受板が退去して切断されたミンチを受板の下方位置の受具に落下させるミンチの分割装置において、品温の高いミンチであっても受板に粘着して姿勢を乱すことのないミンチの分割装置を提供する。
【解決手段】受板5がエンボス加工により表面に複数の凸部10が形成されたステンレス鋼板であって、表面にフッ素樹脂コーティングが施されているミンチの分割装置とする。
(もっと読む)
ワーク移載システム
【課題】ワーク供給量のバラツキに関係なく、オーバーフローしないワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
(もっと読む)
コンベヤ設備
【課題】本発明は、物品の搬送能力を高く保ち、仕分けをおこなえる間隔を確保できるコンベヤ設備を提供することを目的とする。
【解決手段】コンベヤ設備10は、物品12の搬送経路に沿って搬入用コンベヤ14、加速用コンベヤ16、搬出用コンベヤ18が並べられている。コンベヤ設備10は、物品12の大きさおよび間隔を測定する測定装置20、加速用コンベヤ16における物品12の位置を検出する検出装置22、および加速用コンベヤ16を制御する制御装置を備える。
(もっと読む)
回動搬送装置
【課題】電動モータを使用することなく、物品が載置された搬送装置の走行に伴って搬送方向を転向して装置自体の構造を簡易化して小型化及び低コスト化する。
【解決手段】本体フレーム(9)に対する走行体(19)の移動に伴ってガイド部材(17)に対してガイド回転体(43)を転動させることによりラックギャ(35)を移動してピニオンギャ(29)を回転して搬送装置(11)の搬送方向を上記ガイド部材(17)の直線部(17a・17b)の相互間隔に対応する角度で変更可能にする。
(もっと読む)
ワーク反転装置
【課題】ワークを省スペースで反転させるとともにワークの反転に要する力を省力化する。
【解決手段】本発明は、ワークの上下を反転させるワーク反転装置100であって、ワークが載置されるとともに反転軸11を中心として反転可能であって、反転軸11が自身の幅方向の略中央部を貫く反転トレー20と、反転軸11に平行であって反転トレー20上に設けられる揺動軸26に連結され、反転トレー20に対して揺動してワークを挟持可能な揺動トレー30と、反転トレー20の反転に伴って、揺動トレー30を反転トレー20に対して開状態から閉状態まで揺動させるガイド機構40とを備える。
(もっと読む)
ローラコンベア用ストッパシステム
【課題】ローラコンベアに複数のストッパ機構をシンプルな構成で設けることにより、連続的に投入される物品を適切なタイミングで下流側排出端に排出可能なローラコンベア用ストッパシステムを提供する。
【解決手段】ローラコンベア用ストッパシステム(100)は、下り傾斜を有するレール(11)に回転自在な複数のローラ(12)が配設されてなるローラコンベアにおいて、搬送物品(50)を停止させる。ストッパシステム(100)は、駆動軸(134)を回転させる駆動部(130)と、駆動軸の回転駆動に伴って停止状態と非停止状態とを切り替え可能な第1のストッパ機構(110)及び第2のストッパ機構(120)とを備える。第1のストッパ機構(110)及び第2のストッパ機構(120)はシャフト(116)によって互いに連結されており、第1のストッパ機構が停止状態と非停止状態の一方の状態をとるとき第2のストッパ機構は他方の状態をとる。
(もっと読む)
振り分け装置
【課題】低コストで、かつ多種の物品に対して1の列から多数列に安定して振り分けを行うことができる振り分け装置を提供することである。
【解決手段】本発明の振り分け装置100,100aにおいては、入口回転ローラ200と出口回転ローラ400とにゴム搬送部材300が掛けられている。そして、出口回転ローラ400がスライド移動する。したがって、伸縮自在のゴム搬送部材300を用いることで、物品の底面を、入口から出口まで確実に保持することができる。
(もっと読む)
物品整列装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、いずれかの面を下方にすると、上下方向を向いた辺と当該辺に対向する水平方向を向いた辺とが現れるようになっている。
姿勢変更手段31は、物品1の水平方向を向いた辺におけるいずれか一方の端部の下方に位置する係合突起44Bと、該係合突起44Aを昇降させるプレート昇降手段42とを備えている。
上記係合突起44Aが昇降手段によって上昇されると、上記水平方向を向いた辺の端部に当接してこれを押し上げ、該水平方向を向いた辺が上下方向を向くように該物品1を回転させ、上下方向を向いた辺に対しては、上昇されても物品1の姿勢をそのままに維持して、該物品1の辺が上下方向となるようにその姿勢を揃えるようになっている。
【効果】 四面体形状を有する物品の辺の向きがランダムに供給されても、これを揃えることが可能である。
(もっと読む)
塗装システム及びそれを用いた塗装方法
【課題】スプレーガンの数を増加した場合でも塗装ブースの大型化を抑えて、空調のためのエネルギーの増加を抑えることを可能にする。
【解決手段】ワークを搬送する搬送ライン2と、搬送ライン2の途上に配設された塗装ブース7と、塗装ブース7内に配設された塗料噴射手段10を具備し、コンベア3を連続送りするモーター11を塗装ブース7の手前に配置し、コンベア3をタクト送りするモーター12を塗装ブース7の前方に配置し、連続送り用モーター11と塗装ブース12間に、未塗装のワークを待機させる塗装待ちエリア13を配置し、タクト送り用モーター12の前方側に、塗装済みワークを待機させる搬送待ちエリア16を配置し、ワークの塗装中は、タクト送り用モーター12を停止して塗装ブース7内はコンベアを移動せず、コンベア3により搬送されてくる未塗装のワークを塗装待ちエリア13に待機させることとした。
(もっと読む)
パッケージの個別切り出し装置
【課題】パッケージを一個ずつ確実に切り出しする個別切り出し装置を提供する。
【解決手段】供給機構18から投入されるパッケージ群を個別に切り出して排出機構23によって排出される個別切り出し装置であって、前部ベルトガイド12及び後部ベルトガイド13と、前部ベルトガイド及び後部ベルトガイドに架け回されて回動する吸着ベルト14と、吸着ベルトを駆動する吸着ベルト駆動部15と、吸着ベルトの内周面に沿って仕切られパッケージを個別に収納するパッケージ収納部14bと、吸着ベルトを貫通して設けられパッケージ収納部に収納されたパッケージPを吸着保持するための貫通孔14cと、吸着ベルトの外周の一部を覆うように吸着ベルトの外周に沿って配置され、チャンバー吸引駆動部17を介してパッケージ収納部内を吸引する吸着チャンバー16と、吸着ベルトのパッケージ収納部に吸着されたパッケージの吸着を解除する吸着解除手段20と、を備えている。
(もっと読む)
コンベア反転装置及びそれを用いた検査装置
【課題】 駆動ドラムにより、2本のエンドレスベルトを作動させ、該エンドレスベルトの間にワークを挟んだ状態で搬送し、ワークの上下を反転させる反転装置における、ワークの品種の違いへの対応性を向上させる。
【解決手段】 ドラムを、ドラム基部11と複数のドラム分割体12を組み合わせる構造とし、ドラム分割体12に、ワークの形状に対応した突起16と溝17体を設けておく。ドラム分割体はネジ止めなどの方法で接合され、エンドレスベルトが当接していない部分を順次交換できるので、エンドレスベルトの掛け替えなどの付随する作業が不要となり、工数削減と作業性の向上が可能となる。
(もっと読む)
コンベヤ装置
【課題】簡単な構造で、接触による衝撃や滞留をなくし、搬送速度を維持しつつ、姿勢を大きく変化させずに被搬送物を幅方向所定の位置に正確に整列させるコンベヤ装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与える接触駆動機構によってボールコンベヤ110の上方に載置された被搬送物を移動させるコンベヤ装置100において、接触駆動機構が、それぞれボールコンベヤ110の進行方向に対して直角の逆方向に駆動され、ボールコンベヤ100の進行方向に平行に設けられた1対のベルトユニット120、130からなること。
(もっと読む)
仕分装置
【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更を行って搬出することができ、大量の被搬送物を短い間隔で連続的に姿勢や位置の変更することで作業効率を向上できる仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与えるターンテーブル121によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、駆動制御機構130が、ボールコンベヤ110とターンテーブル121とをそれぞれ独立して同時に駆動制御可能であること。
(もっと読む)
アキュムレーションコンベヤ
【課題】簡易な構成で、搬送物間の距離を好適に縮小して、アキュムレーション効率及び搬送効率を向上させる。
【解決手段】アキュムレーションコンベヤ10は、ゾーンZごとに設けられ、該ゾーンZを構成するキャリヤローラ18を回転駆動するモータ20と、ゾーンZごとに設けられ、搬送物Pの通過を検知するセンサ22と、センサ22により検知された隣り合う2つの搬送物の検知情報に基づいて、搬送物の間の距離に関する距離情報を推定し、その推定された距離情報が所定範囲内の場合に、上流側後方の搬送物が搬送されているゾーンZの搬送速度が、ゾーンZの下流側に隣接するゾーンZの搬送速度に対して相対的に速くなるように、ゾーンZのモータ20又はゾーンZのモータ20への制御入力を切り替える制御手段26と、を備える。
(もっと読む)
1 - 20 / 138
[ Back to top ]