
超音波診断装置及び画像処理装置

【課題】管腔内を簡便に観察することができる超音波診断装置及び画像処理装置を提供すること。
【解決手段】実施の形態の超音波診断装置は、トレースライン設定部と、カーブドMPR画像生成部と、制御部とを備える。トレースライン設定部は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。カーブドMPR画像生成部は、トレースライン設定部によって設定された芯線を含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。制御部は、カーブドMPR画像生成部によって生成された2次元画像を所定の表示部にて表示させる。
【解決手段】実施の形態の超音波診断装置は、トレースライン設定部と、カーブドMPR画像生成部と、制御部とを備える。トレースライン設定部は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。カーブドMPR画像生成部は、トレースライン設定部によって設定された芯線を含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。制御部は、カーブドMPR画像生成部によって生成された2次元画像を所定の表示部にて表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施の形態は、超音波診断装置及び画像処理装置に関する。
【背景技術】
【0002】
従来、超音波診断装置は、X線診断装置やX線コンピュータ断層撮影装置などの他の医用画像診断装置に比べ、簡便な操作性、被爆のおそれがない非侵襲性などの利点を備えた装置として、今日の医療において、心臓、肝臓、腎臓、乳腺など、様々な生体組織の検査や診断に利用されている。
【0003】
近年、超音波診断装置においては、2Dアレイプローブ(two dimensional array probe)や、メカニカル4Dプローブ(mechanical four dimensional probe)を用いて3次元データ(ボリュームデータ)を収集し、収集したボリュームデータを用いて消化管や血管などの管腔内の観察が行われている。例えば、収集したボリュームデータから管腔が描出された直交3断面のMPR(Multi Planar Reconstruction)画像を生成して表示させたり、輝度値を白黒反転させるcavityモードにより管腔を立体表示させたりすることで、管腔内の観察が行われる。しかしながら、上述した従来の技術では、管腔内を簡便に観察することが困難となる場合があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−200821号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、管腔内を簡便に観察することができる超音波診断装置及び画像処理装置を提供することである。
【課題を解決するための手段】
【0006】
実施の形態の超音波診断装置は、設定手段と、生成手段と、表示制御手段とを備える。設定手段は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。生成手段は、前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する。表示制御手段は、前記生成手段によって生成された2次元画像を所定の表示部にて表示させる。
【図面の簡単な説明】
【0007】
【図1】図1は、第1の実施形態に係る超音波診断装置の全体構成を説明するための図である。
【図2】図2は、第1の実施形態に係る画像生成部の概要を説明するための図である。
【図3】図3は、従来技術における課題を説明するための図である。
【図4】図4は、第1の実施形態に係る画像生成部の構成の一例を示す図である。
【図5】図5は、第1の実施形態に係るトレースライン設定部による処理の一例を説明するための図である。
【図6】図6は、第1の実施形態に係るカーブドMPR画像生成部による第1の処理を説明するための図である。
【図7】図7は、第1の実施形態に係るカーブドMPR画像生成部による第2の処理を説明するための図である。
【図8A】図8Aは、第1の実施形態に係る仮想内視鏡画像生成部による処理の一例を説明するための図である。
【図8B】図8Bは、第1の実施形態に係る仮想内視鏡画像生成部によって生成された仮想内視鏡画像の従来の表示例を示す図である。
【図9A】図9Aは、第1の実施形態に係る制御部によるカーブドMPR画像の第1の表示例を示す図である。
【図9B】図9Bは、第1の実施形態に係る制御部によるカーブドMPR画像の第2の表示例を示す図である。
【図10】図10は、第1の実施形態に係る超音波診断装置による処理の手順を示すフローチャートである。
【図11】図11は、第2の実施形態に係る画像生成部の構成の一例を示す図である。
【図12】図12は、第2の実施形態に係る連結ボリュームデータ生成部による処理の一例を説明するための図である。
【図13】図13は、第2の実施形態に係るカーブドMPR画像生成部による処理の一例を説明するための図である。
【図14】図14は、第2の実施形態に係る超音波診断装置による処理の手順を示すフローチャートである。
【図15】図15は、第3の実施形態に係る第1の表示例を示す図である。
【図16】図16は、第3の実施形態に係る第2の表示例を示す図である。
【図17】図17は、第3の実施形態に係る第3の表示例を示す図である。
【図18】図18は、第3の実施形態に係るカーブドMPR画像生成の一例を説明するための図である。
【発明を実施するための形態】
【0008】
(第1の実施形態)
まず、本実施形態に係る超音波診断装置の構成について説明する。図1は、本実施形態に係る超音波診断装置100の構成を説明するための図である。図1に示すように、第1の実施形態に係る超音波診断装置100は、超音波プローブ1と、モニタ2と、入力装置3と、装置本体10とを有する。また、装置本体10は、ネットワーク200を介して外部装置4と接続される。
【0009】
超音波プローブ1は、複数の圧電振動子を有し、これら複数の圧電振動子は、後述する装置本体10が有する送受信部11から供給される駆動信号に基づき超音波を発生する。また、超音波プローブ1は、被検体Pからの反射波を受信して電気信号に変換する。また、超音波プローブ1は、圧電振動子に設けられる整合層と、圧電振動子から後方への超音波の伝播を防止するバッキング材などを有する。なお、超音波プローブ1は、装置本体10と着脱自在に接続される。
【0010】
超音波プローブ1から被検体Pに超音波が送信されると、送信された超音波は、被検体Pの体内組織における音響インピーダンスの不連続面で次々と反射され、反射波信号として超音波プローブ1が有する複数の圧電振動子にて受信される。受信される反射波信号の振幅は、超音波が反射される不連続面における音響インピーダンスの差に依存する。なお、送信された超音波パルスが、移動している血流や心臓壁などの表面で反射された場合の反射波信号は、ドプラ効果により、移動体の超音波送信方向に対する速度成分に依存して、周波数偏移を受ける。
【0011】
ここで、本実施形態に係る超音波プローブ1は、超音波により被検体Pを2次元で走査するとともに、被検体Pを3次元で走査することが可能な超音波プローブである。具体的には、本実施形態に係る超音波プローブ1は、被検体Pを2次元で走査する複数の超音波振動子を所定の角度(揺動角度)で揺動させることで、被検体Pを3次元で走査するメカニカルスキャンプローブである。
【0012】
なお、本実施形態は、超音波プローブ1が、複数の超音波振動子がマトリックス状に配置されることで、被検体Pを3次元で超音波走査することが可能な2次元超音波プローブである場合であっても適用可能である。2次元超音波プローブは、超音波を集束して送信することで、被検体Pを2次元で走査することが可能である。
【0013】
入力装置3は、図1に示すように、トラックボール3a、スイッチ3b、ボタン3c、タッチコマンドスクリーン3dなどを有し、後述するインターフェース部18を介して装置本体10と接続される。入力装置3は、超音波診断装置の操作者からの各種設定要求を受け付け、装置本体10に対して受け付けた各種設定要求を転送する。
【0014】
例えば、本実施形態に係る入力装置3は、観察者が観察を所望する管腔を設定するための管腔内の始点や終点の設定などに関する指示を操作者から受け付ける。なお、管腔内の始点や終点の設定の際に操作者が入力装置3を用いて入力する各種指示内容については、後に詳述する。
【0015】
モニタ2は、超音波診断装置の操作者が入力装置3を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体10において生成された超音波画像などを表示したりする。例えば、モニタ2は、後述する画像生成部14の処理によって生成されたカーブドMPR(Curved Multi Planar Reconstructions)画像を表示する。なお、カーブドMPR画像については、後に詳述する。
【0016】
外部装置4は、後述するインターフェース部18を介して装置本体10と接続される装置である。例えば、外部装置4は、各種の医用画像のデータを管理するシステムであるPACS(Picture Archiving and Communication System)のデータベースや、医用画像が添付された電子カルテを管理する電子カルテシステムのデータベースなどである。あるいは、外部装置4は、例えば、X線CT(Computed Tomography)装置、MRI(Magnetic Resonance Imaging)装置など、本実施形態に係る超音波診断装置以外の各種医用画像診断装置である。
【0017】
すなわち、本実施形態に係る装置本体10は、DICOM(Digital Imaging and Communications in Medicine)に則った画像フォーマットに統一された各種医用画像を、インターフェース部18を介して外部装置4から取得することができる。具体的には、本実施形態に係る装置本体10は、インターフェース部18を介して、自装置で生成されたCurved MPR画像の比較対象となる医用画像を、インターフェース部18を介して外部装置4から取得することができる。
【0018】
装置本体10は、超音波プローブ1が受信した反射波に基づいて超音波画像を生成する装置である。具体的には、本実施形態に係る装置本体10は、超音波プローブ1が受信した3次元の反射波データに基づいて3次元超音波画像(ボリュームデータ)を生成可能な装置である。装置本体10は、図1に示すように、送受信部11と、Bモード処理部12と、ドプラ処理部13と、画像生成部14と、画像メモリ15と、内部記憶部16と、制御部17と、インターフェース部18とを有する。
【0019】
送受信部11は、トリガ発生回路、遅延回路およびパルサ回路などを有し、超音波プローブ1に駆動信号を供給する。パルサ回路は、所定のレート周波数で、送信超音波を形成するためのレートパルスを繰り返し発生する。また、遅延回路は、超音波プローブ1から発生される超音波をビーム状に集束して送信指向性を決定するために必要な圧電振動子ごとの遅延時間を、パルサ回路が発生する各レートパルスに対し与える。また、トリガ発生回路は、レートパルスに基づくタイミングで、超音波プローブ1に駆動信号(駆動パルス)を印加する。すなわち、遅延回路は、各レートパルスに対し与える遅延時間を変化させることで、圧電振動子面からの送信方向を任意に調整する。
【0020】
なお、送受信部11は、後述する制御部17の指示に基づいて、所定のスキャンシーケンスを実行するために、送信周波数、送信駆動電圧などを瞬時に変更可能な機能を有している。特に、送信駆動電圧の変更は、瞬間にその値を切り替え可能なリニアアンプ型の発信回路、または、複数の電源ユニットを電気的に切り替える機構によって実現される。
【0021】
また、送受信部11は、アンプ回路、A/D変換器、加算器などを有し、超音波プローブ1が受信した反射波信号に対して各種処理を行なって反射波データを生成する。アンプ回路は、反射波信号をチャンネルごとに増幅してゲイン補正処理を行なう。A/D変換器は、ゲイン補正された反射波信号をA/D変換し、デジタルデータに受信指向性を決定するのに必要な遅延時間を与える。加算器は、A/D変換器によって処理された反射波信号の加算処理を行なって反射波データを生成する。加算器の加算処理により、反射波信号の受信指向性に応じた方向からの反射成分が強調される。
【0022】
このように、送受信部11は、超音波の送受信における送信指向性と受信指向性とを制御する。ここで、本実施形態に係る送受信部11は、超音波プローブ1から被検体Pに対して3次元の超音波ビームを送信させ、超音波プローブ1が受信した3次元の反射波信号から3次元の反射波データを生成する。
【0023】
Bモード処理部12は、送受信部11から反射波データを受信し、対数増幅、包絡線検波処理などを行なって、信号強度が輝度の明るさで表現されるデータ(Bモードデータ)を生成する。
【0024】
ここで、Bモード処理部12は、検波周波数を変化させることで、映像化する周波数帯域を変えることができる。また、Bモード処理部12は、一つの反射波データに対して、二つの検波周波数による検波処理を並列して行うことができる。
【0025】
このBモード処理部12の機能を用いることにより、コントラストハーモニックイメージング(CHI:Contrast Harmonic Imaging)において、造影剤が注入された被検体Pの反射波データから、造影剤(微小気泡、バブル)を反射源とする反射波データ(高調波データ又は分周波データ)と、被検体P内の組織を反射源とする反射波データ(基本波データ)とを分離することができる。すなわち、Bモード処理部12は、組織画像を生成するためのBモードデータとともに、造影画像を生成するためのBモードデータを生成することができる。
【0026】
また、このBモード処理部12の機能を用いることにより、ティッシュハーモニックイメージング(THI:Tissue Harmonic Imaging)において、被検体Pの反射波データから、高調波データ又は分周波データを分離することで、ノイズ成分を除去した組織画像を生成するためのBモードデータを生成することができる。
【0027】
ドプラ処理部13は、送受信部11から受信した反射波データから速度情報を周波数解析し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワーなどの移動体情報を多点について抽出したデータ(ドプラデータ)を生成する。
【0028】
なお、本実施形態に係るBモード処理部12およびドプラ処理部13は、2次元の反射波データおよび3次元の反射波データの両方について処理可能である。すなわち、本実施形態に係るBモード処理部12は、3次元の反射波データから3次元のBモードデータを生成することができる。具体的には、本実施形態に係るBモード処理部12は、通常のBモード撮影時や、コントラストハーモニックイメージング、ティッシュハーモニックイメージングにおいて、3次元のBモードデータを生成することができる。また、本実施形態に係るドプラ処理部13は、3次元の反射波データから3次元のドプラデータを生成することができる。
【0029】
画像生成部14は、Bモード処理部12及びドプラ処理部13が生成したデータから超音波画像を生成する。すなわち、画像生成部14は、Bモード処理部12が生成したBモードデータから反射波の強度を輝度にて表したBモード画像を生成する。具体的には、画像生成部14は、Bモード処理部12が生成した3次元のBモードデータから、3次元のBモード画像を生成する。
【0030】
また、画像生成部14は、ドプラ処理部13が生成したドプラデータから移動体情報を表す平均速度画像、分散画像、パワー画像、又は、これらの組み合わせ画像としてのカラードプラ画像を生成する。具体的には、画像生成部14は、ドプラ処理部13が生成した3次元のドプラデータから、3次元のカラードプラ画像を生成する。
【0031】
なお、以下では、画像生成部14が生成した3次元のBモード画像及び3次元のカラードプラ画像をまとめて「ボリュームデータ」と記載する。
【0032】
また、画像生成部14は、生成したボリュームデータをモニタ2にて表示するための各種画像を生成することができる。具体的には、画像生成部14は、ボリュームデータからMPR画像やレンダリング画像を生成することができる。図2は、第1の実施形態に係る画像生成部の概要を説明するための図である。
【0033】
すなわち、図2に示すように、超音波プローブ1により被検体Pの撮影部位に対して超音波の3次元走査が行なわれることで、送受信部11は、ボリュームデータを生成する。そして、画像生成部14は、ボリュームデータをモニタ2に表示するための画像として、例えば、操作者からの指示により、図2に示すように、直交3断面におけるMPR画像や、超音波プローブ1の被検体Pに対する接触面を視点とした場合のレンダリング画像や、任意の場所を視点とした場合のレンダリング画像を生成する。なお、本実施形態に係る画像生成部14は、自装置以外で生成されたボリュームデータについても、MPR画像及びレンダリング画像の生成処理を行なうことができる。
【0034】
また、画像生成部14は、ボリュームデータに含まれる管腔を描出したカーブドMPR画像などを生成する。画像生成部14によるカーブドMPR画像の生成処理については、後に詳述する。
【0035】
なお、画像生成部14は、超音波画像に、種々のパラメータの文字情報、目盛り、ボディーマークなどを合成した合成画像を生成することもできる。
【0036】
図1に戻って、画像メモリ15は、画像生成部14が生成した超音波画像を記憶するメモリである。また、画像メモリ15は、Bモード処理部12やドプラ処理部13が生成したデータを記憶することも可能である。
【0037】
内部記憶部16は、超音波送受信、画像処理及び表示処理を行なうための制御プログラムや、診断情報(例えば、患者ID、医師の所見など)や、診断プロトコルや各種ボディーマークなどの各種データを記憶する。また、内部記憶部16は、必要に応じて、画像メモリ15が記憶する画像の保管などにも使用される。
【0038】
さらに、内部記憶部16は、外部装置4から転送された各種医用画像の保管にも使用される。具体的には、内部記憶部16は、外部装置4から転送されたボリュームデータを記憶する。例えば、内部記憶部16は、3次元のX線CT画像(以下、X線CTボリュームデータと記載する)や、3次元のMRI画像(以下、MRIボリュームデータと記載する)、他の超音波診断装置にて生成されたボリュームデータを記憶する。また、内部記憶部16が記憶するデータは、後述するインターフェース部18を経由して、外部の周辺装置(外部装置4)へ転送することができる。
【0039】
なお、本実施形態は、操作者が所望する画像データ(ボリュームデータ)がフレキシブルディスク(FD)、CD−ROM、MO、DVDなどの記憶媒体を介して、内部記憶部16に格納される場合であっても適用可能である。また、本実施形態は、操作者が所望する画像データ(ボリュームデータ)を記憶する記憶装置が、内部記憶部16以外に設置される場合であっても適用可能である。
【0040】
制御部17は、情報処理装置(計算機)としての機能を実現する制御プロセッサ(CPU:Central Processing Unit)であり、超音波診断装置の処理全体を制御する。具体的には、制御部17は、入力装置3を介して操作者から入力された各種設定要求や、内部記憶部16から読込んだ各種制御プログラム及び各種データに基づき、送受信部11、Bモード処理部12、ドプラ処理部13及び画像生成部14の処理を制御する。また、制御部17は、画像メモリ15が記憶する超音波画像や、内部記憶部16が記憶する各種画像、又は、画像生成部14による処理を行なうためのGUI、画像生成部14の処理結果などをモニタ2にて表示するように制御する。また、制御部17は、操作者から入力装置3を介して受け付けたボリュームデータが外部装置4からネットワーク200及びインターフェース部18を介して内部記憶部16に転送されるように、制御する。
【0041】
インターフェース部18は、入力装置3、ネットワーク200及び外部装置4に対するインターフェースである。入力装置3が受け付けた操作者からの各種設定情報及び各種指示は、インターフェース部18により、制御部17に転送される。また、入力装置3が操作者から受け付けた画像データの転送要求は、インターフェース部18により、ネットワーク200を介して外部装置4に通知される。また、外部装置4が転送した画像データは、インターフェース部18により、内部記憶部16に格納される。
【0042】
以上、第1の実施形態に係る超音波診断装置の全体構成について説明した。かかる構成のもと、第1の実施形態に係る超音波診断装置は、以下、詳細に説明する画像生成部14の処理により、管腔内を簡便に観察することができるように構成されている。
【0043】
ここで、まず、従来技術において、管腔内を簡便に観察することが困難となる場合について説明する。図3は、従来技術における課題を説明するための図である。図3においては、モニタ2にて、管腔が描出された直交3断面のMPR画像と、輝度値を白黒反転させるcavityモードで表示させた指定方向からのレンダリング画像とを表示させた状態を示す。ここで、図3においては、左側の上下及び右側の上の画像が直交3断面のMPR画像を示し、右下の画像がcavityモードでのレンダリング画像を示す。
【0044】
例えば、観察者は、図3に示す直交3断面のMPR画像をトラックボールによりスライス断面を並進させたり、回転させたりしながら、管腔内の性状などを観察する。この方法においては、例えば、腹部臓器のように管腔が分岐して3次元に複雑に走行する場合に、管腔をトレースすることが容易ではない。また、cavityモードでのレンダリング画像においては、管腔の形状については把握することができるが、管腔内の病変部位について、壁や壁の内側の観察が困難である。
【0045】
例えば、管腔より発生して、壁内に浸潤する胆管癌や乳癌などの病変部位は、管腔形状や内腔面のみならず、壁内部の性状の観察が重要であるが、上述した従来技術では、管腔内の観察が容易ではなく、管腔内を簡便に観察することが困難である。
【0046】
そこで、本実施形態では、以下に詳細に記載する画像生成部14の処理により、管腔のカーブドMPRを生成して、観察者に対して表示することにより、管腔内を簡便に観察することを可能にする。
【0047】
図4は、第1の実施形態に係る画像生成部14の構成の一例を示す図である。図4に示すように、画像生成部14は、トレースライン(trace line)設定部141と、カーブド(curved)MPR画像生成部142と、仮想内視鏡画像生成部143とを有する。
【0048】
トレースライン設定部141は、超音波プローブ1から送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。具体的には、トレースライン設定部141は、画像メモリ15或いは内部記憶部16によって記憶されたボリュームデータを読み出し、ボリュームデータに含まれる管腔を抽出し、抽出した管腔に芯線(以下、トレースラインと記す)を設定する。図5は、第1の実施形態に係るトレースライン設定部141による処理の一例を説明するための図である。
【0049】
ここで、まず、トレースライン設定部141の処理を行なうために、観察者は、入力装置3を介して、処理対象となるボリュームデータを指定し、更に、直交3断面(A面、B面、C面)のMPR画像の表示要求を行なう。表示要求を入力装置3から通知された制御部17は、画像生成部14に対して、操作者が指定したボリュームデータから直交3断面のMPR画像を生成するように制御する。そして、モニタ2は、制御部17の制御により、画像生成部14が生成した直交3断面のMPR画像を表示する。
【0050】
観察者は、モニタ2に表示されたMPR画像に描出された管腔に、トレースライン設定部141がトレースラインを設定するための始点を入力装置3が有する描画機能を用いて設定する。制御部17は、入力装置3が受け付けた始点のボリュームデータにおける位置情報を取得し、取得した始点の位置情報をトレースライン設定部141に通知する。
【0051】
トレースライン設定部141は、始点におけるボリュームデータの輝度を取得し、取得した輝度に対して所定の閾値の範囲内となる輝度を有するボクセル(voxel)を順次特定する。これにより、トレースライン設定部141は、例えば、図5に示すように、ボリュームデータD1に含まれる管腔領域300を抽出する。すなわち、トレースライン設定部141は、モルフォロジー演算(Dilation, Erosion, Opening, Closing)を行なうことで、管腔領域を抽出する。そして、トレースライン設定部141は、図5に示すように、管腔領域300にトレースライン301を設定する。例えば、トレースライン設定部141は、管腔領域300を細線化処理することでトレースライン301を設定する。換言すると、トレースライン設定部141は、トレースライン301のボリュームデータにおける位置情報を、管腔領域300のトレースライン情報として設定する。
【0052】
なお、トレースライン設定部141は、管腔領域が分岐している場合、予め設定された選択条件に基づいて、トレースラインの設定方向を選択することができる。例えば、分岐する管腔領域において、分岐点を操作者が設定したとする。かかる場合には、トレースライン設定部141は、2方向に分岐する管腔領域を抽出する。そして、トレースライン設定部141は、トレースラインとして、分岐点で2つに別れる2本のトレースラインを設定することができる。
【0053】
ここで、選択条件として、「トレースラインの設定方向:長さ優先」が設定されている場合には、トレースライン設定部141は、2本のトレースラインの長さを比較して、より長いトレースラインを設定できる方向のトレースラインを設定する。或いは、選択条件として、「トレースラインの設定方向:管腔の太さ優先」が設定されている場合には、トレースライン設定部141は、2方向に分岐する2つの管腔のうち、管腔の太い方向のトレースラインを設定する。
【0054】
なお、上述したトレースライン設定部141の処理は、操作者により手動で実行される場合であっても良い。また、本実施形態は、管腔領域が分岐している場合に、操作者がトレースラインの設定方向を指定する場合であっても良い。例えば、観察者は、モニタ2にて表示させた分岐点付近の断面画像上で、所望する方向にカーソルを移動させることでトレースラインの設定方向を指定する。
【0055】
図4に戻って、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。具体的には、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインの位置情報に基づいて、ボリュームデータにおけるトレースラインを含む任意のスライス断面のMPR画像を生成する。例えば、カーブドMPR画像生成部142は、トレースラインにおける任意の始点から終点までを含む断面の2次元画像を、ボリュームデータから生成する。
【0056】
図6は、第1の実施形態に係るカーブドMPR画像生成部142による第1の処理を説明するための図である。図6においては、図5に示すトレースライン設定部141によるトレースラインの設定処理の後の処理について示す。例えば、カーブドMPR画像生成部142は、図6に示すように、トレースライン301上のa−b間のラインでスライスした断面のMPR画像を生成する。そして、カーブドMPR画像生成部142は、トレースライン301に沿って徐々に移動しながら、トレースライン301上の任意の区間のラインごとにスライスしたMPR画像を複数生成する。すなわち、管腔画像生成部142は、管腔領域300の全域に渡って、管腔の略中心位置を通過する断面を含むMPR画像を生成する。ここで、任意の区間としては、例えば、トレースライン301がほぼ直線となっている区間などである。
【0057】
そして、カーブドMPR画像生成部142は、生成した複数のMPR画像それぞれから管腔を含む任意の領域を抽出し、抽出した任意の領域それぞれをトレースラインに沿って合成したカーブドMPR画像を生成する。具体的には、カーブドMPR画像生成部142は、複数のMPR画像それぞれから管腔の略中心位置を通過する断面領域を抽出し、抽出した断面領域をトレースラインの位置情報に基づいて合成したカーブドMPR画像を生成する。
【0058】
図7は、第1の実施形態に係るカーブドMPR画像生成部142による第2の処理を説明するための図である。図7においては、図6に示すMPR画像の生成処理の後の処理について示す。例えば、カーブドMPR画像生成部142は、図7に示すように、生成した複数のMPR画像から矢印302で示す幅の断面領域をそれぞれ抽出する。なお、矢印302で示す幅は、観察者によって任意に設定することができる。例えば、矢印302で示す幅は、MPR画像を生成する際に用いた任意の区間、或いは、観察者が所望する任意の長さに設定される。
【0059】
そして、カーブドMPR画像生成部142は、図7に示すように、複数の管腔画像からそれぞれ抽出した断面領域をトレースラインの位置情報に基づいて合成したカーブドMPR画像を生成する。すなわち、カーブドMPR画像生成部142は、図7に示すように、管腔領域の全域の断面が描出されたカーブドMPR画像を生成する。そして、カーブドMPR画像生成部142は、生成したカーブドMPR画像を画像メモリ15に格納する。
【0060】
図4に戻って、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、任意の視点及び視線方向からの仮想内視鏡画像を生成する。具体的には、仮想内視鏡画像生成部143は、トレースラインの軌道に沿って、任意の方向に、一定の距離間隔及び一定の時間間隔で視点を移動させ、各視線方向から管腔内を投影した仮想内視鏡画像を、ボリュームデータを用いて生成する。図8Aは、第1の実施形態に係る仮想内視鏡画像生成部143による処理の一例を説明するための図である。
【0061】
ここで、まず、仮想内視鏡画像生成部143が処理を行うために、観察者によって視点及び視線方向が設定される。例えば、図8Aの上側の図の矢印303に示すように、モニタ2にて表示されたMPR画像に描出された管腔に、観察者によって視点及び視線方向が設定される。仮想内視鏡画像生成部143は、図8Aの下側の図に示すように、トレースライン301上の視点304から視線方向305に、管腔内を投影した仮想内視鏡画像を生成する。このとき、仮想内視鏡画像生成部143は、図8Aの下側の図に示すように、視線方向305を中心とする視野角であるFOV(Field Of View)角にて定まる近平面306及び遠平面307の範囲に向けて視点304から放射状に透視投影する。そして、仮想内視鏡画像生成部143は、一定の距離間隔及び一定の時間間隔で視点を移動させながら、各視線方向から管腔内を投影した仮想内視鏡画像をそれぞれ生成し、生成した仮想内視鏡画像を画像メモリ15に格納する。
【0062】
図8Bは、第1の実施形態に係る仮想内視鏡画像生成部143によって生成された仮想内視鏡画像の従来の表示例を示す図である。図8Bにおいては、仮想内視鏡画像を右下に示し、左側の上下及び右上に、視点位置における直交3断面のMPR画像を示す。また、図8Bにおいては、制御部17が、画像メモリ15から仮想内視鏡画像を読み出し、読み出した仮想内視鏡画像をモニタ2にて表示させた状態を示す。
【0063】
例えば、図8Bに示すように、制御部17は、仮想内視鏡画像生成部143によって生成された各視線方向から管腔内を投影した仮想内視鏡画像と、当該仮想内視鏡画像が生成された視点位置における直交3断面のMPR画像をモニタ2に表示させる。ここで、制御部17は、仮想内視鏡生成部143が仮想内視鏡画像を生成する際に視点を移動した時間間隔で仮想内視鏡画像を更新することで、管腔内を視線方向に移動しながら観察できる動画像(フライスルー画像:flythrough画像)を表示させることが可能である。なお、フライスルー画像が表示される場合には、視点の移動に伴って、直交3断面のMPR画像も更新される。
【0064】
本実施形態に係る超音波診断装置100は、上述したカーブドMPR画像と、フライスルー画像とをモニタに並列表示することで、管腔内の性状をより把握しやすくすることができる。具体的には、制御部17は、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像をモニタ2にて表示させる場合に、カーブドMPR画像生成部142によって生成されたカーブドMPR画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させる。
【0065】
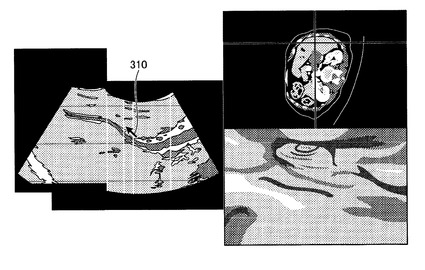
図9Aは、第1の実施形態に係る制御部17によるカーブドMPR画像の第1の表示例を示す図である。例えば、制御部17は、図9Aに示すように、管腔のフライスルー画像と、当該管腔を直線308(鉛直面)でスライスした場合のカーブドMPR画像と、現時点の視点におけるMPR画像とを、モニタ2にて並列表示させる。ここで、制御部17は、図9Aの矢印310及び311に示すように、フライスルー画像の視点及び視線方向をカーブドMPR画像及びMPR画像それぞれに表示させる。そして、制御部17は、フライスルー画像における視点の移動に伴って、カーブドMPR画像及びMPR画像上の矢印310及び311を移動させる。すなわち、制御部17は、フライスルー画像と、カーブドMPR画像と、MPR画像との対応関係を明瞭にすることで、観察者は3種の画像の比較を容易に行なうことができ、管腔内の性状をより把握しやすくすることが可能である。
【0066】
また、第1の実施形態に係る超音波診断装置100は、管腔を任意の断面でスライスしたカーブドMPR画像を生成して表示することができる。図9Bは、第1の実施形態に係る制御部17によるカーブドMPR画像の第2の表示例を示す図である。例えば、制御部17は、図9Bに示すように、管腔を直線312(水平面)でスライスした場合のカーブドMPR画像を表示することも可能である。すなわち、第1の実施形態に係る超音波診断装置100においては、カーブドMPR画像生成部142に生成させるMPR画像のスライス断面を変化させることで、カーブドMPR画像の断面を種々設定することが可能である。
【0067】
また、第1の実施形態に係る超音波診断装置100は、カーブドMPR画像上で管腔長及び内腔の直径などを計測するための計測機能を備えることも可能である。例えば、超音波診断装置100は、観察者が入力装置3を介してモニタ2に描出されたカーブドMPR画像上の任意の範囲を指定した際に、当該任意の範囲に対して種々の計測を行うことが可能な計測機能を備えることが可能である。
【0068】
なお、上述した実施形態では、カーブドMPR画像と仮想内視鏡画像とを並列表示する場合について説明したが、実施形態は、これに限定されるものではなく、例えば、カーブドMPR画像のみをモニタ2にて表示させる場合であってもよい。
【0069】
次に、図10を用いて、第1の実施形態に係る超音波診断装置100の処理について説明する。図10は、第1の実施形態に係る超音波診断装置100による処理の手順を示すフローチャートである。図10に示すように、第1の実施形態に係る超音波診断装置100においては、操作者から開始指示を受付けると(ステップS101肯定)、トレースライン設定部141は、ボリュームデータに含まれる管腔にトレースラインを設定する(ステップS102)。なお、開始指示としては、例えば、トレースラインの始点が設定された場合などが挙げられる。
【0070】
そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインに沿って、カーブドMPR画像を生成する(ステップS103)。続いて、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、仮想内視鏡画像を生成する(ステップS104)。
【0071】
そして、制御部17は、カーブドMPR画像生成部142によって生成されたカーブドMPR画像と、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像とを観察位置を連動させてモニタ2にて表示させ(ステップS105)、処理を終了する。
【0072】
なお、開始指示を受付けるまで、超音波診断装置100は、待機状態である(ステップS101否定)。また、上述した手順では、カーブドMPR画像を生成した後に仮想内視鏡画像を生成する場合について説明したが、実施形態はこれに限定されるものではなく、仮想内視鏡画像を生成した後にカーブドMPR画像を生成する場合であってもよく、或いは、カーブドMPR画像の生成と仮想内視鏡画像の生成とを同時に平行して実行する場合であってもよい。
【0073】
上述したように、第1の実施形態によれば、トレースライン設定部141が、超音波プローブ1から送信される送信信号を被検体に3次元的に走査することで収集されたボリュームデータに含まれる管腔にトレースラインを設定する。そして、カーブドMPR画像生成部142が、トレースライン設定部141によって設定されたトレースラインを含む断面のカーブドMPR画像を、ボリュームデータから当該トレースラインに沿って生成する。そして、制御部17が、カーブドMPR画像生成部142によって生成されたカーブドMPR画像をモニタ2にて表示させる。従って、第1の実施形態に係る超音波診断装置100は、管腔の断面が正確に描出されたMPR画像を表示させることができ、管腔内を簡便に観察することを可能にする。
【0074】
また、第1の実施形態によれば、カーブドMPR画像生成部142は、トレースラインにおける任意の始点から終点までを含む断面のカーブドMPR画像を、ボリュームデータから生成する。従って、第1の実施形態に係る超音波診断装置100は、管腔の任意の位置の断面が描出されたMPR画像を表示させることができ、管腔内をより簡便に観察することを可能にする。
【0075】
また、第1の実施形態によれば、カーブドMPR画像生成部142は、ボリュームデータにおけるトレースラインを含む任意の断面でカーブドMPR画像を生成する。従って、第1の実施形態に係る超音波診断装置100は、管腔の任意の断面が描出されたMPR画像を表示させることができ、管腔内をさらに簡便に観察することを可能にする。
【0076】
また、第1の実施形態によれば、仮想内視鏡生成部143が、トレースライン設定部141によって設定された管腔のトレースラインに沿って、任意の視点及び視線方向からの仮想内視鏡画像を生成する。そして、制御部17が、仮想内視鏡生成部143によって生成された仮想内視鏡画像をモニタ2にて表示させる場合に、カーブドMPR画像生成部142によって生成されたカーブドMPR画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させる。従って、第1の実施形態に係る超音波診断装置100は、異なる種類の画像を容易に比較させることができ、管腔内をより簡便に観察することを可能にする。
【0077】
(第2の実施形態)
上述した第1の実施形態では、1つのボリュームデータを用いてカーブドMPR画像を生成する場合について説明した。第2の実施形態では、複数のボリュームデータを合成し、合成したボリュームデータを用いてカーブドMPR画像を生成する場合について説明する。図11は、第2の実施形態に係る画像生成部14aの構成の一例を示す図である。第2の実施形態に係る画像生成部14aは、図11に示すように、第1の実施形態に係る画像生成部14と比較して、連結ボリュームデータ生成部144を有する点が異なる。以下、これを中心に説明する。
【0078】
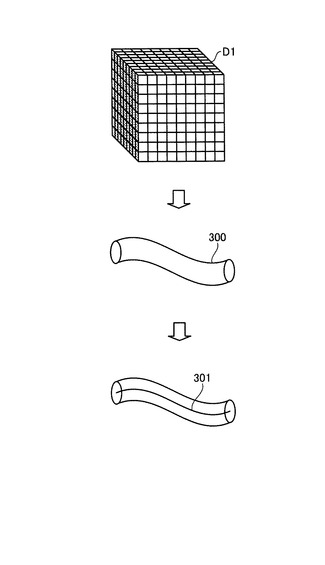
連結ボリュームデータ生成部144は、被検体に対する走査位置が異なる複数の3次元画像データを、当該3次元画像データに含まれる撮像対象部位における略同一位置にて合成した合成3次元画像データを生成する。具体的には、連結ボリュームデータ生成部144は、複数のボリュームデータそれぞれについて、ボクセルごとの特徴量を抽出する。そして、連結ボリュームデータ生成部144は、複数のボリュームデータ間で、ボクセルごとの特徴量の配置が近似した領域を抽出し、抽出した領域にて複数のボリュームデータを重ね合わせた連結ボリュームデータ(3Dパノラマデータ:three dimensional panorama data)を生成する。
【0079】
図12は、第2の実施形態に係る連結ボリュームデータ生成部144による処理の一例を説明するための図である。例えば、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについて、ボクセルごとの特徴量を抽出する。一例を挙げると、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについてボクセルごとの輝度値を抽出する。そして、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについてボクセルごとの輝度値を比較し、図12に示すように、ボリュームデータD1の右側のボクセル列と、ボリュームデータD2の左側のボクセル列とを、ボクセルごとの特徴量の配置が近似した領域として抽出する。
【0080】
そして、連結ボリュームデータ生成部144は、図12に示すように、ボリュームデータD1とボリュームデータD2とを、抽出した領域で重ね合わせた連結ボリュームデータD3を生成し、画像メモリ15に格納する。なお、図12においては、2つのボリュームデータを連結する場合について示しているが、実施形態はこれに限定されるものではなく、任意の数のボリュームデータを連結することが可能であり、例えば、3つ以上のボリュームデータを連結する場合であってもよい。
【0081】
トレースライン設定部141は、連結ボリュームデータ生成部144によって生成された連結ボリュームデータに含まれる管腔にトレースラインを設定する。具体的には、トレースライン設定部141は、画像メモリ15によって記憶された連結ボリュームデータから生成されたMPR画像にトレースラインの始点が設定されると、設定された始点に基づいて、連結ボリュームデータに含まれる管腔にトレースラインを設定する。
【0082】
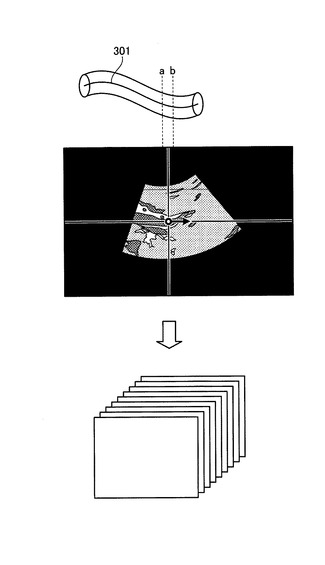
カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面のカーブドMPR画像を、連結ボリュームデータから当該トレースラインに沿って生成する。図13は、第2の実施形態に係るカーブドMPR画像生成部142による処理の一例を説明するための図である。
【0083】
例えば、カーブドMPR画像生成部142は、図13の左上の図に示す連結ボリュームデータにトレースラインが設定されると、図13の左下の図に示すように、設定されたトレースラインに沿って、MPR画像を生成する。すなわち、第2の実施形態に係るカーブドMPR画像生成部142は、図13の右側の図に示すように、第1の実施形態と比較して、より広い領域を網羅したカーブドMPR画像を生成することとなる。
【0084】
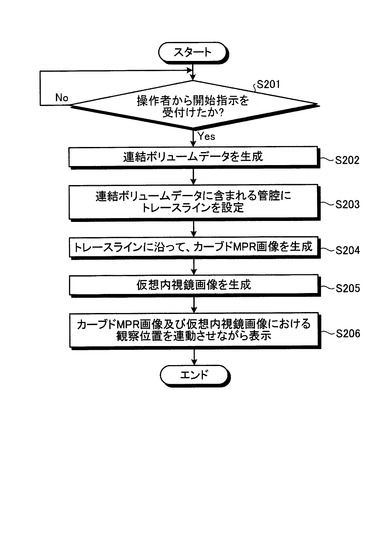
次に、図14を用いて、第2の実施形態に係る超音波診断装置100の処理について説明する。図14は、第2の実施形態に係る超音波診断装置100による処理の手順を示すフローチャートである。図14に示すように、第2の実施形態に係る超音波診断装置100においては、操作者から開始指示を受付けると(ステップS201肯定)、連結ボリュームデータ生成部144は、複数のボリュームデータを連結させた連結ボリュームデータを生成する(ステップS202)。そして、トレースライン設定部141は、連結ボリュームデータに含まれる管腔にトレースラインを設定する(ステップS203)。なお、開始指示としては、例えば、操作者から連結ボリュームデータの生成コマンドを受信した場合などが挙げられる。
【0085】
そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインに沿って、カーブドMPR画像を生成する(ステップS204)。続いて、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、仮想内視鏡画像を生成する(ステップS205)。
【0086】
そして、制御部17は、カーブドMPR画像生成部142によって生成されたカーブドMPR画像と、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像とを観察位置を連動させてモニタ2にて表示させ(ステップS206)、処理を終了する。
【0087】
なお、開始指示を受付けるまで、超音波診断装置100は、待機状態である(ステップS201否定)。また、上述した手順では、カーブドMPR画像を生成した後に仮想内視鏡画像を生成する場合について説明したが、実施形態はこれに限定されるものではなく、仮想内視鏡画像を生成した後にカーブドMPR画像を生成する場合であってもよく、或いは、カーブドMPR画像の生成と仮想内視鏡画像の生成とを同時に平行して実行する場合であってもよい。
【0088】
上述したように、第2の実施形態によれば、連結ボリュームデータ生成部144は、被検体に対する走査位置が異なる複数のボリュームデータを、当該ボリュームデータに含まれる撮像対象部位における略同一位置にて合成した連結ボリュームデータを生成する。トレースライン設定部141は、連結ボリュームデータ生成部144によって生成された連結ボリュームデータに含まれる管腔にトレースラインを設定する。そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面のMPR画像を、連結ボリュームデータから当該トレースラインに沿って生成する。従って、第2の実施形態に係る超音波診断装置100は、単一のボリュームデータ内に収まらない大きな管腔についても、カーブドMPR画像を生成することができ、種々の管腔を容易に観察することを可能にする。
【0089】
(第3の実施形態)
さて、これまで第1及び2の実施形態について説明したが、上述した第1及び第2の実施形態以外にも、種々の異なる形態にて実施されてよいものである。
【0090】
(1)複数の画像の並列表示
上述した第1及び第2の実施形態では、カーブドMPR画像とフライスルー画像とを並列表示する場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、種々の画像を任意の組合せで並列表示させることが可能である。例えば、カーブドMPR画像と、Cavityモードによる管腔のレンダリング画像とを並列表示することが可能である。図15は、第3の実施形態に係る第1の表示例を示す図である。
【0091】
例えば、制御部17は、図15に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左上)と、管腔の水平面でスライスされたカーブドMPR画像(左下)と、トレースラインの始点が設定されたMPR画像(右上)と、Cavityモードによる管腔のレンダリング画像(右下)とを並列表示する。
【0092】
また、例えば、カーブドMPR画像と、Cavityモードによる管腔のレンダリング画像と、フライスルー画像とを並列表示することが可能である。図16は、第3の実施形態に係る第2の表示例を示す図である。
【0093】
例えば、制御部17は、図16に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左)と、Cavityモードによる管腔のレンダリング画像(右上)と、フライスルー画像(右下)とを並列表示する。
【0094】
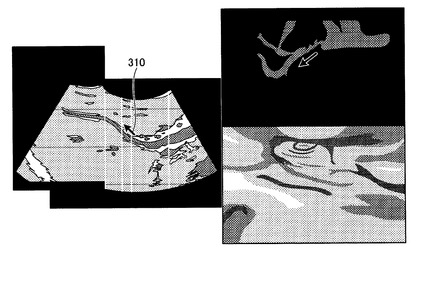
また、例えば、カーブドMPR画像と、フライスルー画像と、他のモダリティの医用画像とを並列表示することが可能である。図17は、第3の実施形態に係る第3の表示例を示す図である。
【0095】
例えば、制御部17は、図17に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左)と、フライスルー画像(右下)と、X線CT画像(右上)とを並列表示する。かかる場合には、まず、制御部17は、内部記憶部16に記憶された他のモダリティの医用画像データ(ボリュームデータ)を読み出す、或いは、ネットワーク200を介して外部装置4から他の医用画像データ(ボリュームデータ)を取得するように制御する。そして、制御部17は、取得した他のモダリティのボリュームデータと、超音波診断装置100にて収集したボリュームデータとの位置合わせを実行する。例えば、制御部17は、非線形のワーピング処理や、平行移動及び回転などの線形処理を実行することで、他のモダリティのボリュームデータと、超音波診断装置100にて収集したボリュームデータとの位置合わせを実行する。
【0096】
そして、制御部17は、ボリュームデータの位置合わせを実行した後に、他のモダリティのボリュームデータ及び超音波診断装置100にて収集したボリュームデータそれぞれから画像を生成する。これにより、画像間で位置の対応関係を把握することができる。すなわち、制御部17は、例えば、現時点でフライスルー画像が描出している位置が他の画像でどこに相当するのかを矢印などで表示することが可能になる。なお、図17においては、他のモダリティの医用画像としてX線CT画像が示されているが、実施形態はこれに限定されるものではなく、例えば、MR画像を用いる場合であってもよい。
【0097】
(2)カーブドMPR画像の生成例
上述した第1及び第2の実施形態では、3軸上を進行するトレースラインの1軸を削除した平面画像をカーブドMPR画像として生成する場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、トレースラインを直線にし、それに沿ってカーブドMPR画像を生成する場合であってもよい。
【0098】
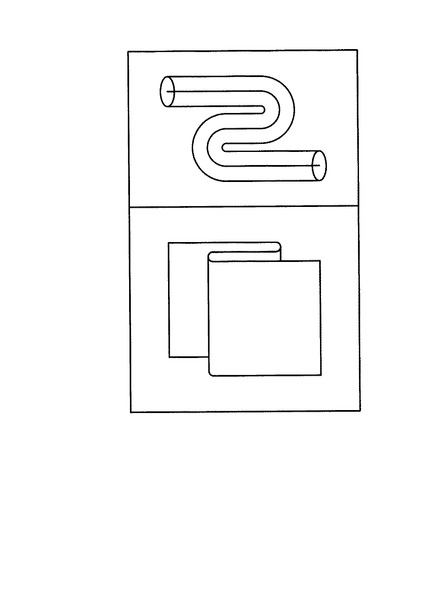
また、3軸上を進行するトレースラインに沿って、3次元空間に曲面で示したカーブドMPR画像を生成する場合であってもよい。図18は、第3の実施形態に係るカーブドMPR画像生成の一例を説明するための図である。例えば、カーブドMPR画像生成部142は、図18の上図に示す管腔に設定されたトレースラインに沿って、図18の下図に示すように、3次元空間に実際の管腔と同様の曲面を有したカーブドMPR画像を生成する。
【0099】
以上説明したとおり、第1の実施形態、第2の実施形態及び第3の実施形態によれば、本実施形態の超音波診断装置及び画像処理装置は、管腔内を簡便に観察することを可能にする。
【0100】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0101】
1 超音波プローブ
10 装置本体
14 画像生成部
17 制御部
100 超音波診断装置
141 トレースライン設定部
142 カーブドMPR画像生成部
143 仮想内視鏡画像生成部
144 連結ボリュームデータ生成部
【技術分野】
【0001】
本発明の実施の形態は、超音波診断装置及び画像処理装置に関する。
【背景技術】
【0002】
従来、超音波診断装置は、X線診断装置やX線コンピュータ断層撮影装置などの他の医用画像診断装置に比べ、簡便な操作性、被爆のおそれがない非侵襲性などの利点を備えた装置として、今日の医療において、心臓、肝臓、腎臓、乳腺など、様々な生体組織の検査や診断に利用されている。
【0003】
近年、超音波診断装置においては、2Dアレイプローブ(two dimensional array probe)や、メカニカル4Dプローブ(mechanical four dimensional probe)を用いて3次元データ(ボリュームデータ)を収集し、収集したボリュームデータを用いて消化管や血管などの管腔内の観察が行われている。例えば、収集したボリュームデータから管腔が描出された直交3断面のMPR(Multi Planar Reconstruction)画像を生成して表示させたり、輝度値を白黒反転させるcavityモードにより管腔を立体表示させたりすることで、管腔内の観察が行われる。しかしながら、上述した従来の技術では、管腔内を簡便に観察することが困難となる場合があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−200821号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、管腔内を簡便に観察することができる超音波診断装置及び画像処理装置を提供することである。
【課題を解決するための手段】
【0006】
実施の形態の超音波診断装置は、設定手段と、生成手段と、表示制御手段とを備える。設定手段は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。生成手段は、前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する。表示制御手段は、前記生成手段によって生成された2次元画像を所定の表示部にて表示させる。
【図面の簡単な説明】
【0007】
【図1】図1は、第1の実施形態に係る超音波診断装置の全体構成を説明するための図である。
【図2】図2は、第1の実施形態に係る画像生成部の概要を説明するための図である。
【図3】図3は、従来技術における課題を説明するための図である。
【図4】図4は、第1の実施形態に係る画像生成部の構成の一例を示す図である。
【図5】図5は、第1の実施形態に係るトレースライン設定部による処理の一例を説明するための図である。
【図6】図6は、第1の実施形態に係るカーブドMPR画像生成部による第1の処理を説明するための図である。
【図7】図7は、第1の実施形態に係るカーブドMPR画像生成部による第2の処理を説明するための図である。
【図8A】図8Aは、第1の実施形態に係る仮想内視鏡画像生成部による処理の一例を説明するための図である。
【図8B】図8Bは、第1の実施形態に係る仮想内視鏡画像生成部によって生成された仮想内視鏡画像の従来の表示例を示す図である。
【図9A】図9Aは、第1の実施形態に係る制御部によるカーブドMPR画像の第1の表示例を示す図である。
【図9B】図9Bは、第1の実施形態に係る制御部によるカーブドMPR画像の第2の表示例を示す図である。
【図10】図10は、第1の実施形態に係る超音波診断装置による処理の手順を示すフローチャートである。
【図11】図11は、第2の実施形態に係る画像生成部の構成の一例を示す図である。
【図12】図12は、第2の実施形態に係る連結ボリュームデータ生成部による処理の一例を説明するための図である。
【図13】図13は、第2の実施形態に係るカーブドMPR画像生成部による処理の一例を説明するための図である。
【図14】図14は、第2の実施形態に係る超音波診断装置による処理の手順を示すフローチャートである。
【図15】図15は、第3の実施形態に係る第1の表示例を示す図である。
【図16】図16は、第3の実施形態に係る第2の表示例を示す図である。
【図17】図17は、第3の実施形態に係る第3の表示例を示す図である。
【図18】図18は、第3の実施形態に係るカーブドMPR画像生成の一例を説明するための図である。
【発明を実施するための形態】
【0008】
(第1の実施形態)
まず、本実施形態に係る超音波診断装置の構成について説明する。図1は、本実施形態に係る超音波診断装置100の構成を説明するための図である。図1に示すように、第1の実施形態に係る超音波診断装置100は、超音波プローブ1と、モニタ2と、入力装置3と、装置本体10とを有する。また、装置本体10は、ネットワーク200を介して外部装置4と接続される。
【0009】
超音波プローブ1は、複数の圧電振動子を有し、これら複数の圧電振動子は、後述する装置本体10が有する送受信部11から供給される駆動信号に基づき超音波を発生する。また、超音波プローブ1は、被検体Pからの反射波を受信して電気信号に変換する。また、超音波プローブ1は、圧電振動子に設けられる整合層と、圧電振動子から後方への超音波の伝播を防止するバッキング材などを有する。なお、超音波プローブ1は、装置本体10と着脱自在に接続される。
【0010】
超音波プローブ1から被検体Pに超音波が送信されると、送信された超音波は、被検体Pの体内組織における音響インピーダンスの不連続面で次々と反射され、反射波信号として超音波プローブ1が有する複数の圧電振動子にて受信される。受信される反射波信号の振幅は、超音波が反射される不連続面における音響インピーダンスの差に依存する。なお、送信された超音波パルスが、移動している血流や心臓壁などの表面で反射された場合の反射波信号は、ドプラ効果により、移動体の超音波送信方向に対する速度成分に依存して、周波数偏移を受ける。
【0011】
ここで、本実施形態に係る超音波プローブ1は、超音波により被検体Pを2次元で走査するとともに、被検体Pを3次元で走査することが可能な超音波プローブである。具体的には、本実施形態に係る超音波プローブ1は、被検体Pを2次元で走査する複数の超音波振動子を所定の角度(揺動角度)で揺動させることで、被検体Pを3次元で走査するメカニカルスキャンプローブである。
【0012】
なお、本実施形態は、超音波プローブ1が、複数の超音波振動子がマトリックス状に配置されることで、被検体Pを3次元で超音波走査することが可能な2次元超音波プローブである場合であっても適用可能である。2次元超音波プローブは、超音波を集束して送信することで、被検体Pを2次元で走査することが可能である。
【0013】
入力装置3は、図1に示すように、トラックボール3a、スイッチ3b、ボタン3c、タッチコマンドスクリーン3dなどを有し、後述するインターフェース部18を介して装置本体10と接続される。入力装置3は、超音波診断装置の操作者からの各種設定要求を受け付け、装置本体10に対して受け付けた各種設定要求を転送する。
【0014】
例えば、本実施形態に係る入力装置3は、観察者が観察を所望する管腔を設定するための管腔内の始点や終点の設定などに関する指示を操作者から受け付ける。なお、管腔内の始点や終点の設定の際に操作者が入力装置3を用いて入力する各種指示内容については、後に詳述する。
【0015】
モニタ2は、超音波診断装置の操作者が入力装置3を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体10において生成された超音波画像などを表示したりする。例えば、モニタ2は、後述する画像生成部14の処理によって生成されたカーブドMPR(Curved Multi Planar Reconstructions)画像を表示する。なお、カーブドMPR画像については、後に詳述する。
【0016】
外部装置4は、後述するインターフェース部18を介して装置本体10と接続される装置である。例えば、外部装置4は、各種の医用画像のデータを管理するシステムであるPACS(Picture Archiving and Communication System)のデータベースや、医用画像が添付された電子カルテを管理する電子カルテシステムのデータベースなどである。あるいは、外部装置4は、例えば、X線CT(Computed Tomography)装置、MRI(Magnetic Resonance Imaging)装置など、本実施形態に係る超音波診断装置以外の各種医用画像診断装置である。
【0017】
すなわち、本実施形態に係る装置本体10は、DICOM(Digital Imaging and Communications in Medicine)に則った画像フォーマットに統一された各種医用画像を、インターフェース部18を介して外部装置4から取得することができる。具体的には、本実施形態に係る装置本体10は、インターフェース部18を介して、自装置で生成されたCurved MPR画像の比較対象となる医用画像を、インターフェース部18を介して外部装置4から取得することができる。
【0018】
装置本体10は、超音波プローブ1が受信した反射波に基づいて超音波画像を生成する装置である。具体的には、本実施形態に係る装置本体10は、超音波プローブ1が受信した3次元の反射波データに基づいて3次元超音波画像(ボリュームデータ)を生成可能な装置である。装置本体10は、図1に示すように、送受信部11と、Bモード処理部12と、ドプラ処理部13と、画像生成部14と、画像メモリ15と、内部記憶部16と、制御部17と、インターフェース部18とを有する。
【0019】
送受信部11は、トリガ発生回路、遅延回路およびパルサ回路などを有し、超音波プローブ1に駆動信号を供給する。パルサ回路は、所定のレート周波数で、送信超音波を形成するためのレートパルスを繰り返し発生する。また、遅延回路は、超音波プローブ1から発生される超音波をビーム状に集束して送信指向性を決定するために必要な圧電振動子ごとの遅延時間を、パルサ回路が発生する各レートパルスに対し与える。また、トリガ発生回路は、レートパルスに基づくタイミングで、超音波プローブ1に駆動信号(駆動パルス)を印加する。すなわち、遅延回路は、各レートパルスに対し与える遅延時間を変化させることで、圧電振動子面からの送信方向を任意に調整する。
【0020】
なお、送受信部11は、後述する制御部17の指示に基づいて、所定のスキャンシーケンスを実行するために、送信周波数、送信駆動電圧などを瞬時に変更可能な機能を有している。特に、送信駆動電圧の変更は、瞬間にその値を切り替え可能なリニアアンプ型の発信回路、または、複数の電源ユニットを電気的に切り替える機構によって実現される。
【0021】
また、送受信部11は、アンプ回路、A/D変換器、加算器などを有し、超音波プローブ1が受信した反射波信号に対して各種処理を行なって反射波データを生成する。アンプ回路は、反射波信号をチャンネルごとに増幅してゲイン補正処理を行なう。A/D変換器は、ゲイン補正された反射波信号をA/D変換し、デジタルデータに受信指向性を決定するのに必要な遅延時間を与える。加算器は、A/D変換器によって処理された反射波信号の加算処理を行なって反射波データを生成する。加算器の加算処理により、反射波信号の受信指向性に応じた方向からの反射成分が強調される。
【0022】
このように、送受信部11は、超音波の送受信における送信指向性と受信指向性とを制御する。ここで、本実施形態に係る送受信部11は、超音波プローブ1から被検体Pに対して3次元の超音波ビームを送信させ、超音波プローブ1が受信した3次元の反射波信号から3次元の反射波データを生成する。
【0023】
Bモード処理部12は、送受信部11から反射波データを受信し、対数増幅、包絡線検波処理などを行なって、信号強度が輝度の明るさで表現されるデータ(Bモードデータ)を生成する。
【0024】
ここで、Bモード処理部12は、検波周波数を変化させることで、映像化する周波数帯域を変えることができる。また、Bモード処理部12は、一つの反射波データに対して、二つの検波周波数による検波処理を並列して行うことができる。
【0025】
このBモード処理部12の機能を用いることにより、コントラストハーモニックイメージング(CHI:Contrast Harmonic Imaging)において、造影剤が注入された被検体Pの反射波データから、造影剤(微小気泡、バブル)を反射源とする反射波データ(高調波データ又は分周波データ)と、被検体P内の組織を反射源とする反射波データ(基本波データ)とを分離することができる。すなわち、Bモード処理部12は、組織画像を生成するためのBモードデータとともに、造影画像を生成するためのBモードデータを生成することができる。
【0026】
また、このBモード処理部12の機能を用いることにより、ティッシュハーモニックイメージング(THI:Tissue Harmonic Imaging)において、被検体Pの反射波データから、高調波データ又は分周波データを分離することで、ノイズ成分を除去した組織画像を生成するためのBモードデータを生成することができる。
【0027】
ドプラ処理部13は、送受信部11から受信した反射波データから速度情報を周波数解析し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、平均速度、分散、パワーなどの移動体情報を多点について抽出したデータ(ドプラデータ)を生成する。
【0028】
なお、本実施形態に係るBモード処理部12およびドプラ処理部13は、2次元の反射波データおよび3次元の反射波データの両方について処理可能である。すなわち、本実施形態に係るBモード処理部12は、3次元の反射波データから3次元のBモードデータを生成することができる。具体的には、本実施形態に係るBモード処理部12は、通常のBモード撮影時や、コントラストハーモニックイメージング、ティッシュハーモニックイメージングにおいて、3次元のBモードデータを生成することができる。また、本実施形態に係るドプラ処理部13は、3次元の反射波データから3次元のドプラデータを生成することができる。
【0029】
画像生成部14は、Bモード処理部12及びドプラ処理部13が生成したデータから超音波画像を生成する。すなわち、画像生成部14は、Bモード処理部12が生成したBモードデータから反射波の強度を輝度にて表したBモード画像を生成する。具体的には、画像生成部14は、Bモード処理部12が生成した3次元のBモードデータから、3次元のBモード画像を生成する。
【0030】
また、画像生成部14は、ドプラ処理部13が生成したドプラデータから移動体情報を表す平均速度画像、分散画像、パワー画像、又は、これらの組み合わせ画像としてのカラードプラ画像を生成する。具体的には、画像生成部14は、ドプラ処理部13が生成した3次元のドプラデータから、3次元のカラードプラ画像を生成する。
【0031】
なお、以下では、画像生成部14が生成した3次元のBモード画像及び3次元のカラードプラ画像をまとめて「ボリュームデータ」と記載する。
【0032】
また、画像生成部14は、生成したボリュームデータをモニタ2にて表示するための各種画像を生成することができる。具体的には、画像生成部14は、ボリュームデータからMPR画像やレンダリング画像を生成することができる。図2は、第1の実施形態に係る画像生成部の概要を説明するための図である。
【0033】
すなわち、図2に示すように、超音波プローブ1により被検体Pの撮影部位に対して超音波の3次元走査が行なわれることで、送受信部11は、ボリュームデータを生成する。そして、画像生成部14は、ボリュームデータをモニタ2に表示するための画像として、例えば、操作者からの指示により、図2に示すように、直交3断面におけるMPR画像や、超音波プローブ1の被検体Pに対する接触面を視点とした場合のレンダリング画像や、任意の場所を視点とした場合のレンダリング画像を生成する。なお、本実施形態に係る画像生成部14は、自装置以外で生成されたボリュームデータについても、MPR画像及びレンダリング画像の生成処理を行なうことができる。
【0034】
また、画像生成部14は、ボリュームデータに含まれる管腔を描出したカーブドMPR画像などを生成する。画像生成部14によるカーブドMPR画像の生成処理については、後に詳述する。
【0035】
なお、画像生成部14は、超音波画像に、種々のパラメータの文字情報、目盛り、ボディーマークなどを合成した合成画像を生成することもできる。
【0036】
図1に戻って、画像メモリ15は、画像生成部14が生成した超音波画像を記憶するメモリである。また、画像メモリ15は、Bモード処理部12やドプラ処理部13が生成したデータを記憶することも可能である。
【0037】
内部記憶部16は、超音波送受信、画像処理及び表示処理を行なうための制御プログラムや、診断情報(例えば、患者ID、医師の所見など)や、診断プロトコルや各種ボディーマークなどの各種データを記憶する。また、内部記憶部16は、必要に応じて、画像メモリ15が記憶する画像の保管などにも使用される。
【0038】
さらに、内部記憶部16は、外部装置4から転送された各種医用画像の保管にも使用される。具体的には、内部記憶部16は、外部装置4から転送されたボリュームデータを記憶する。例えば、内部記憶部16は、3次元のX線CT画像(以下、X線CTボリュームデータと記載する)や、3次元のMRI画像(以下、MRIボリュームデータと記載する)、他の超音波診断装置にて生成されたボリュームデータを記憶する。また、内部記憶部16が記憶するデータは、後述するインターフェース部18を経由して、外部の周辺装置(外部装置4)へ転送することができる。
【0039】
なお、本実施形態は、操作者が所望する画像データ(ボリュームデータ)がフレキシブルディスク(FD)、CD−ROM、MO、DVDなどの記憶媒体を介して、内部記憶部16に格納される場合であっても適用可能である。また、本実施形態は、操作者が所望する画像データ(ボリュームデータ)を記憶する記憶装置が、内部記憶部16以外に設置される場合であっても適用可能である。
【0040】
制御部17は、情報処理装置(計算機)としての機能を実現する制御プロセッサ(CPU:Central Processing Unit)であり、超音波診断装置の処理全体を制御する。具体的には、制御部17は、入力装置3を介して操作者から入力された各種設定要求や、内部記憶部16から読込んだ各種制御プログラム及び各種データに基づき、送受信部11、Bモード処理部12、ドプラ処理部13及び画像生成部14の処理を制御する。また、制御部17は、画像メモリ15が記憶する超音波画像や、内部記憶部16が記憶する各種画像、又は、画像生成部14による処理を行なうためのGUI、画像生成部14の処理結果などをモニタ2にて表示するように制御する。また、制御部17は、操作者から入力装置3を介して受け付けたボリュームデータが外部装置4からネットワーク200及びインターフェース部18を介して内部記憶部16に転送されるように、制御する。
【0041】
インターフェース部18は、入力装置3、ネットワーク200及び外部装置4に対するインターフェースである。入力装置3が受け付けた操作者からの各種設定情報及び各種指示は、インターフェース部18により、制御部17に転送される。また、入力装置3が操作者から受け付けた画像データの転送要求は、インターフェース部18により、ネットワーク200を介して外部装置4に通知される。また、外部装置4が転送した画像データは、インターフェース部18により、内部記憶部16に格納される。
【0042】
以上、第1の実施形態に係る超音波診断装置の全体構成について説明した。かかる構成のもと、第1の実施形態に係る超音波診断装置は、以下、詳細に説明する画像生成部14の処理により、管腔内を簡便に観察することができるように構成されている。
【0043】
ここで、まず、従来技術において、管腔内を簡便に観察することが困難となる場合について説明する。図3は、従来技術における課題を説明するための図である。図3においては、モニタ2にて、管腔が描出された直交3断面のMPR画像と、輝度値を白黒反転させるcavityモードで表示させた指定方向からのレンダリング画像とを表示させた状態を示す。ここで、図3においては、左側の上下及び右側の上の画像が直交3断面のMPR画像を示し、右下の画像がcavityモードでのレンダリング画像を示す。
【0044】
例えば、観察者は、図3に示す直交3断面のMPR画像をトラックボールによりスライス断面を並進させたり、回転させたりしながら、管腔内の性状などを観察する。この方法においては、例えば、腹部臓器のように管腔が分岐して3次元に複雑に走行する場合に、管腔をトレースすることが容易ではない。また、cavityモードでのレンダリング画像においては、管腔の形状については把握することができるが、管腔内の病変部位について、壁や壁の内側の観察が困難である。
【0045】
例えば、管腔より発生して、壁内に浸潤する胆管癌や乳癌などの病変部位は、管腔形状や内腔面のみならず、壁内部の性状の観察が重要であるが、上述した従来技術では、管腔内の観察が容易ではなく、管腔内を簡便に観察することが困難である。
【0046】
そこで、本実施形態では、以下に詳細に記載する画像生成部14の処理により、管腔のカーブドMPRを生成して、観察者に対して表示することにより、管腔内を簡便に観察することを可能にする。
【0047】
図4は、第1の実施形態に係る画像生成部14の構成の一例を示す図である。図4に示すように、画像生成部14は、トレースライン(trace line)設定部141と、カーブド(curved)MPR画像生成部142と、仮想内視鏡画像生成部143とを有する。
【0048】
トレースライン設定部141は、超音波プローブ1から送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。具体的には、トレースライン設定部141は、画像メモリ15或いは内部記憶部16によって記憶されたボリュームデータを読み出し、ボリュームデータに含まれる管腔を抽出し、抽出した管腔に芯線(以下、トレースラインと記す)を設定する。図5は、第1の実施形態に係るトレースライン設定部141による処理の一例を説明するための図である。
【0049】
ここで、まず、トレースライン設定部141の処理を行なうために、観察者は、入力装置3を介して、処理対象となるボリュームデータを指定し、更に、直交3断面(A面、B面、C面)のMPR画像の表示要求を行なう。表示要求を入力装置3から通知された制御部17は、画像生成部14に対して、操作者が指定したボリュームデータから直交3断面のMPR画像を生成するように制御する。そして、モニタ2は、制御部17の制御により、画像生成部14が生成した直交3断面のMPR画像を表示する。
【0050】
観察者は、モニタ2に表示されたMPR画像に描出された管腔に、トレースライン設定部141がトレースラインを設定するための始点を入力装置3が有する描画機能を用いて設定する。制御部17は、入力装置3が受け付けた始点のボリュームデータにおける位置情報を取得し、取得した始点の位置情報をトレースライン設定部141に通知する。
【0051】
トレースライン設定部141は、始点におけるボリュームデータの輝度を取得し、取得した輝度に対して所定の閾値の範囲内となる輝度を有するボクセル(voxel)を順次特定する。これにより、トレースライン設定部141は、例えば、図5に示すように、ボリュームデータD1に含まれる管腔領域300を抽出する。すなわち、トレースライン設定部141は、モルフォロジー演算(Dilation, Erosion, Opening, Closing)を行なうことで、管腔領域を抽出する。そして、トレースライン設定部141は、図5に示すように、管腔領域300にトレースライン301を設定する。例えば、トレースライン設定部141は、管腔領域300を細線化処理することでトレースライン301を設定する。換言すると、トレースライン設定部141は、トレースライン301のボリュームデータにおける位置情報を、管腔領域300のトレースライン情報として設定する。
【0052】
なお、トレースライン設定部141は、管腔領域が分岐している場合、予め設定された選択条件に基づいて、トレースラインの設定方向を選択することができる。例えば、分岐する管腔領域において、分岐点を操作者が設定したとする。かかる場合には、トレースライン設定部141は、2方向に分岐する管腔領域を抽出する。そして、トレースライン設定部141は、トレースラインとして、分岐点で2つに別れる2本のトレースラインを設定することができる。
【0053】
ここで、選択条件として、「トレースラインの設定方向:長さ優先」が設定されている場合には、トレースライン設定部141は、2本のトレースラインの長さを比較して、より長いトレースラインを設定できる方向のトレースラインを設定する。或いは、選択条件として、「トレースラインの設定方向:管腔の太さ優先」が設定されている場合には、トレースライン設定部141は、2方向に分岐する2つの管腔のうち、管腔の太い方向のトレースラインを設定する。
【0054】
なお、上述したトレースライン設定部141の処理は、操作者により手動で実行される場合であっても良い。また、本実施形態は、管腔領域が分岐している場合に、操作者がトレースラインの設定方向を指定する場合であっても良い。例えば、観察者は、モニタ2にて表示させた分岐点付近の断面画像上で、所望する方向にカーソルを移動させることでトレースラインの設定方向を指定する。
【0055】
図4に戻って、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。具体的には、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインの位置情報に基づいて、ボリュームデータにおけるトレースラインを含む任意のスライス断面のMPR画像を生成する。例えば、カーブドMPR画像生成部142は、トレースラインにおける任意の始点から終点までを含む断面の2次元画像を、ボリュームデータから生成する。
【0056】
図6は、第1の実施形態に係るカーブドMPR画像生成部142による第1の処理を説明するための図である。図6においては、図5に示すトレースライン設定部141によるトレースラインの設定処理の後の処理について示す。例えば、カーブドMPR画像生成部142は、図6に示すように、トレースライン301上のa−b間のラインでスライスした断面のMPR画像を生成する。そして、カーブドMPR画像生成部142は、トレースライン301に沿って徐々に移動しながら、トレースライン301上の任意の区間のラインごとにスライスしたMPR画像を複数生成する。すなわち、管腔画像生成部142は、管腔領域300の全域に渡って、管腔の略中心位置を通過する断面を含むMPR画像を生成する。ここで、任意の区間としては、例えば、トレースライン301がほぼ直線となっている区間などである。
【0057】
そして、カーブドMPR画像生成部142は、生成した複数のMPR画像それぞれから管腔を含む任意の領域を抽出し、抽出した任意の領域それぞれをトレースラインに沿って合成したカーブドMPR画像を生成する。具体的には、カーブドMPR画像生成部142は、複数のMPR画像それぞれから管腔の略中心位置を通過する断面領域を抽出し、抽出した断面領域をトレースラインの位置情報に基づいて合成したカーブドMPR画像を生成する。
【0058】
図7は、第1の実施形態に係るカーブドMPR画像生成部142による第2の処理を説明するための図である。図7においては、図6に示すMPR画像の生成処理の後の処理について示す。例えば、カーブドMPR画像生成部142は、図7に示すように、生成した複数のMPR画像から矢印302で示す幅の断面領域をそれぞれ抽出する。なお、矢印302で示す幅は、観察者によって任意に設定することができる。例えば、矢印302で示す幅は、MPR画像を生成する際に用いた任意の区間、或いは、観察者が所望する任意の長さに設定される。
【0059】
そして、カーブドMPR画像生成部142は、図7に示すように、複数の管腔画像からそれぞれ抽出した断面領域をトレースラインの位置情報に基づいて合成したカーブドMPR画像を生成する。すなわち、カーブドMPR画像生成部142は、図7に示すように、管腔領域の全域の断面が描出されたカーブドMPR画像を生成する。そして、カーブドMPR画像生成部142は、生成したカーブドMPR画像を画像メモリ15に格納する。
【0060】
図4に戻って、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、任意の視点及び視線方向からの仮想内視鏡画像を生成する。具体的には、仮想内視鏡画像生成部143は、トレースラインの軌道に沿って、任意の方向に、一定の距離間隔及び一定の時間間隔で視点を移動させ、各視線方向から管腔内を投影した仮想内視鏡画像を、ボリュームデータを用いて生成する。図8Aは、第1の実施形態に係る仮想内視鏡画像生成部143による処理の一例を説明するための図である。
【0061】
ここで、まず、仮想内視鏡画像生成部143が処理を行うために、観察者によって視点及び視線方向が設定される。例えば、図8Aの上側の図の矢印303に示すように、モニタ2にて表示されたMPR画像に描出された管腔に、観察者によって視点及び視線方向が設定される。仮想内視鏡画像生成部143は、図8Aの下側の図に示すように、トレースライン301上の視点304から視線方向305に、管腔内を投影した仮想内視鏡画像を生成する。このとき、仮想内視鏡画像生成部143は、図8Aの下側の図に示すように、視線方向305を中心とする視野角であるFOV(Field Of View)角にて定まる近平面306及び遠平面307の範囲に向けて視点304から放射状に透視投影する。そして、仮想内視鏡画像生成部143は、一定の距離間隔及び一定の時間間隔で視点を移動させながら、各視線方向から管腔内を投影した仮想内視鏡画像をそれぞれ生成し、生成した仮想内視鏡画像を画像メモリ15に格納する。
【0062】
図8Bは、第1の実施形態に係る仮想内視鏡画像生成部143によって生成された仮想内視鏡画像の従来の表示例を示す図である。図8Bにおいては、仮想内視鏡画像を右下に示し、左側の上下及び右上に、視点位置における直交3断面のMPR画像を示す。また、図8Bにおいては、制御部17が、画像メモリ15から仮想内視鏡画像を読み出し、読み出した仮想内視鏡画像をモニタ2にて表示させた状態を示す。
【0063】
例えば、図8Bに示すように、制御部17は、仮想内視鏡画像生成部143によって生成された各視線方向から管腔内を投影した仮想内視鏡画像と、当該仮想内視鏡画像が生成された視点位置における直交3断面のMPR画像をモニタ2に表示させる。ここで、制御部17は、仮想内視鏡生成部143が仮想内視鏡画像を生成する際に視点を移動した時間間隔で仮想内視鏡画像を更新することで、管腔内を視線方向に移動しながら観察できる動画像(フライスルー画像:flythrough画像)を表示させることが可能である。なお、フライスルー画像が表示される場合には、視点の移動に伴って、直交3断面のMPR画像も更新される。
【0064】
本実施形態に係る超音波診断装置100は、上述したカーブドMPR画像と、フライスルー画像とをモニタに並列表示することで、管腔内の性状をより把握しやすくすることができる。具体的には、制御部17は、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像をモニタ2にて表示させる場合に、カーブドMPR画像生成部142によって生成されたカーブドMPR画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させる。
【0065】
図9Aは、第1の実施形態に係る制御部17によるカーブドMPR画像の第1の表示例を示す図である。例えば、制御部17は、図9Aに示すように、管腔のフライスルー画像と、当該管腔を直線308(鉛直面)でスライスした場合のカーブドMPR画像と、現時点の視点におけるMPR画像とを、モニタ2にて並列表示させる。ここで、制御部17は、図9Aの矢印310及び311に示すように、フライスルー画像の視点及び視線方向をカーブドMPR画像及びMPR画像それぞれに表示させる。そして、制御部17は、フライスルー画像における視点の移動に伴って、カーブドMPR画像及びMPR画像上の矢印310及び311を移動させる。すなわち、制御部17は、フライスルー画像と、カーブドMPR画像と、MPR画像との対応関係を明瞭にすることで、観察者は3種の画像の比較を容易に行なうことができ、管腔内の性状をより把握しやすくすることが可能である。
【0066】
また、第1の実施形態に係る超音波診断装置100は、管腔を任意の断面でスライスしたカーブドMPR画像を生成して表示することができる。図9Bは、第1の実施形態に係る制御部17によるカーブドMPR画像の第2の表示例を示す図である。例えば、制御部17は、図9Bに示すように、管腔を直線312(水平面)でスライスした場合のカーブドMPR画像を表示することも可能である。すなわち、第1の実施形態に係る超音波診断装置100においては、カーブドMPR画像生成部142に生成させるMPR画像のスライス断面を変化させることで、カーブドMPR画像の断面を種々設定することが可能である。
【0067】
また、第1の実施形態に係る超音波診断装置100は、カーブドMPR画像上で管腔長及び内腔の直径などを計測するための計測機能を備えることも可能である。例えば、超音波診断装置100は、観察者が入力装置3を介してモニタ2に描出されたカーブドMPR画像上の任意の範囲を指定した際に、当該任意の範囲に対して種々の計測を行うことが可能な計測機能を備えることが可能である。
【0068】
なお、上述した実施形態では、カーブドMPR画像と仮想内視鏡画像とを並列表示する場合について説明したが、実施形態は、これに限定されるものではなく、例えば、カーブドMPR画像のみをモニタ2にて表示させる場合であってもよい。
【0069】
次に、図10を用いて、第1の実施形態に係る超音波診断装置100の処理について説明する。図10は、第1の実施形態に係る超音波診断装置100による処理の手順を示すフローチャートである。図10に示すように、第1の実施形態に係る超音波診断装置100においては、操作者から開始指示を受付けると(ステップS101肯定)、トレースライン設定部141は、ボリュームデータに含まれる管腔にトレースラインを設定する(ステップS102)。なお、開始指示としては、例えば、トレースラインの始点が設定された場合などが挙げられる。
【0070】
そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインに沿って、カーブドMPR画像を生成する(ステップS103)。続いて、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、仮想内視鏡画像を生成する(ステップS104)。
【0071】
そして、制御部17は、カーブドMPR画像生成部142によって生成されたカーブドMPR画像と、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像とを観察位置を連動させてモニタ2にて表示させ(ステップS105)、処理を終了する。
【0072】
なお、開始指示を受付けるまで、超音波診断装置100は、待機状態である(ステップS101否定)。また、上述した手順では、カーブドMPR画像を生成した後に仮想内視鏡画像を生成する場合について説明したが、実施形態はこれに限定されるものではなく、仮想内視鏡画像を生成した後にカーブドMPR画像を生成する場合であってもよく、或いは、カーブドMPR画像の生成と仮想内視鏡画像の生成とを同時に平行して実行する場合であってもよい。
【0073】
上述したように、第1の実施形態によれば、トレースライン設定部141が、超音波プローブ1から送信される送信信号を被検体に3次元的に走査することで収集されたボリュームデータに含まれる管腔にトレースラインを設定する。そして、カーブドMPR画像生成部142が、トレースライン設定部141によって設定されたトレースラインを含む断面のカーブドMPR画像を、ボリュームデータから当該トレースラインに沿って生成する。そして、制御部17が、カーブドMPR画像生成部142によって生成されたカーブドMPR画像をモニタ2にて表示させる。従って、第1の実施形態に係る超音波診断装置100は、管腔の断面が正確に描出されたMPR画像を表示させることができ、管腔内を簡便に観察することを可能にする。
【0074】
また、第1の実施形態によれば、カーブドMPR画像生成部142は、トレースラインにおける任意の始点から終点までを含む断面のカーブドMPR画像を、ボリュームデータから生成する。従って、第1の実施形態に係る超音波診断装置100は、管腔の任意の位置の断面が描出されたMPR画像を表示させることができ、管腔内をより簡便に観察することを可能にする。
【0075】
また、第1の実施形態によれば、カーブドMPR画像生成部142は、ボリュームデータにおけるトレースラインを含む任意の断面でカーブドMPR画像を生成する。従って、第1の実施形態に係る超音波診断装置100は、管腔の任意の断面が描出されたMPR画像を表示させることができ、管腔内をさらに簡便に観察することを可能にする。
【0076】
また、第1の実施形態によれば、仮想内視鏡生成部143が、トレースライン設定部141によって設定された管腔のトレースラインに沿って、任意の視点及び視線方向からの仮想内視鏡画像を生成する。そして、制御部17が、仮想内視鏡生成部143によって生成された仮想内視鏡画像をモニタ2にて表示させる場合に、カーブドMPR画像生成部142によって生成されたカーブドMPR画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させる。従って、第1の実施形態に係る超音波診断装置100は、異なる種類の画像を容易に比較させることができ、管腔内をより簡便に観察することを可能にする。
【0077】
(第2の実施形態)
上述した第1の実施形態では、1つのボリュームデータを用いてカーブドMPR画像を生成する場合について説明した。第2の実施形態では、複数のボリュームデータを合成し、合成したボリュームデータを用いてカーブドMPR画像を生成する場合について説明する。図11は、第2の実施形態に係る画像生成部14aの構成の一例を示す図である。第2の実施形態に係る画像生成部14aは、図11に示すように、第1の実施形態に係る画像生成部14と比較して、連結ボリュームデータ生成部144を有する点が異なる。以下、これを中心に説明する。
【0078】
連結ボリュームデータ生成部144は、被検体に対する走査位置が異なる複数の3次元画像データを、当該3次元画像データに含まれる撮像対象部位における略同一位置にて合成した合成3次元画像データを生成する。具体的には、連結ボリュームデータ生成部144は、複数のボリュームデータそれぞれについて、ボクセルごとの特徴量を抽出する。そして、連結ボリュームデータ生成部144は、複数のボリュームデータ間で、ボクセルごとの特徴量の配置が近似した領域を抽出し、抽出した領域にて複数のボリュームデータを重ね合わせた連結ボリュームデータ(3Dパノラマデータ:three dimensional panorama data)を生成する。
【0079】
図12は、第2の実施形態に係る連結ボリュームデータ生成部144による処理の一例を説明するための図である。例えば、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについて、ボクセルごとの特徴量を抽出する。一例を挙げると、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについてボクセルごとの輝度値を抽出する。そして、連結ボリュームデータ生成部144は、ボリュームデータD1及びボリュームデータD2それぞれについてボクセルごとの輝度値を比較し、図12に示すように、ボリュームデータD1の右側のボクセル列と、ボリュームデータD2の左側のボクセル列とを、ボクセルごとの特徴量の配置が近似した領域として抽出する。
【0080】
そして、連結ボリュームデータ生成部144は、図12に示すように、ボリュームデータD1とボリュームデータD2とを、抽出した領域で重ね合わせた連結ボリュームデータD3を生成し、画像メモリ15に格納する。なお、図12においては、2つのボリュームデータを連結する場合について示しているが、実施形態はこれに限定されるものではなく、任意の数のボリュームデータを連結することが可能であり、例えば、3つ以上のボリュームデータを連結する場合であってもよい。
【0081】
トレースライン設定部141は、連結ボリュームデータ生成部144によって生成された連結ボリュームデータに含まれる管腔にトレースラインを設定する。具体的には、トレースライン設定部141は、画像メモリ15によって記憶された連結ボリュームデータから生成されたMPR画像にトレースラインの始点が設定されると、設定された始点に基づいて、連結ボリュームデータに含まれる管腔にトレースラインを設定する。
【0082】
カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面のカーブドMPR画像を、連結ボリュームデータから当該トレースラインに沿って生成する。図13は、第2の実施形態に係るカーブドMPR画像生成部142による処理の一例を説明するための図である。
【0083】
例えば、カーブドMPR画像生成部142は、図13の左上の図に示す連結ボリュームデータにトレースラインが設定されると、図13の左下の図に示すように、設定されたトレースラインに沿って、MPR画像を生成する。すなわち、第2の実施形態に係るカーブドMPR画像生成部142は、図13の右側の図に示すように、第1の実施形態と比較して、より広い領域を網羅したカーブドMPR画像を生成することとなる。
【0084】
次に、図14を用いて、第2の実施形態に係る超音波診断装置100の処理について説明する。図14は、第2の実施形態に係る超音波診断装置100による処理の手順を示すフローチャートである。図14に示すように、第2の実施形態に係る超音波診断装置100においては、操作者から開始指示を受付けると(ステップS201肯定)、連結ボリュームデータ生成部144は、複数のボリュームデータを連結させた連結ボリュームデータを生成する(ステップS202)。そして、トレースライン設定部141は、連結ボリュームデータに含まれる管腔にトレースラインを設定する(ステップS203)。なお、開始指示としては、例えば、操作者から連結ボリュームデータの生成コマンドを受信した場合などが挙げられる。
【0085】
そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインに沿って、カーブドMPR画像を生成する(ステップS204)。続いて、仮想内視鏡画像生成部143は、トレースライン設定部141によって設定されたトレースラインに沿って、仮想内視鏡画像を生成する(ステップS205)。
【0086】
そして、制御部17は、カーブドMPR画像生成部142によって生成されたカーブドMPR画像と、仮想内視鏡画像生成部143によって生成された仮想内視鏡画像とを観察位置を連動させてモニタ2にて表示させ(ステップS206)、処理を終了する。
【0087】
なお、開始指示を受付けるまで、超音波診断装置100は、待機状態である(ステップS201否定)。また、上述した手順では、カーブドMPR画像を生成した後に仮想内視鏡画像を生成する場合について説明したが、実施形態はこれに限定されるものではなく、仮想内視鏡画像を生成した後にカーブドMPR画像を生成する場合であってもよく、或いは、カーブドMPR画像の生成と仮想内視鏡画像の生成とを同時に平行して実行する場合であってもよい。
【0088】
上述したように、第2の実施形態によれば、連結ボリュームデータ生成部144は、被検体に対する走査位置が異なる複数のボリュームデータを、当該ボリュームデータに含まれる撮像対象部位における略同一位置にて合成した連結ボリュームデータを生成する。トレースライン設定部141は、連結ボリュームデータ生成部144によって生成された連結ボリュームデータに含まれる管腔にトレースラインを設定する。そして、カーブドMPR画像生成部142は、トレースライン設定部141によって設定されたトレースラインを含む断面のMPR画像を、連結ボリュームデータから当該トレースラインに沿って生成する。従って、第2の実施形態に係る超音波診断装置100は、単一のボリュームデータ内に収まらない大きな管腔についても、カーブドMPR画像を生成することができ、種々の管腔を容易に観察することを可能にする。
【0089】
(第3の実施形態)
さて、これまで第1及び2の実施形態について説明したが、上述した第1及び第2の実施形態以外にも、種々の異なる形態にて実施されてよいものである。
【0090】
(1)複数の画像の並列表示
上述した第1及び第2の実施形態では、カーブドMPR画像とフライスルー画像とを並列表示する場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、種々の画像を任意の組合せで並列表示させることが可能である。例えば、カーブドMPR画像と、Cavityモードによる管腔のレンダリング画像とを並列表示することが可能である。図15は、第3の実施形態に係る第1の表示例を示す図である。
【0091】
例えば、制御部17は、図15に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左上)と、管腔の水平面でスライスされたカーブドMPR画像(左下)と、トレースラインの始点が設定されたMPR画像(右上)と、Cavityモードによる管腔のレンダリング画像(右下)とを並列表示する。
【0092】
また、例えば、カーブドMPR画像と、Cavityモードによる管腔のレンダリング画像と、フライスルー画像とを並列表示することが可能である。図16は、第3の実施形態に係る第2の表示例を示す図である。
【0093】
例えば、制御部17は、図16に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左)と、Cavityモードによる管腔のレンダリング画像(右上)と、フライスルー画像(右下)とを並列表示する。
【0094】
また、例えば、カーブドMPR画像と、フライスルー画像と、他のモダリティの医用画像とを並列表示することが可能である。図17は、第3の実施形態に係る第3の表示例を示す図である。
【0095】
例えば、制御部17は、図17に示すように、管腔の鉛直面でスライスされたカーブドMPR画像(左)と、フライスルー画像(右下)と、X線CT画像(右上)とを並列表示する。かかる場合には、まず、制御部17は、内部記憶部16に記憶された他のモダリティの医用画像データ(ボリュームデータ)を読み出す、或いは、ネットワーク200を介して外部装置4から他の医用画像データ(ボリュームデータ)を取得するように制御する。そして、制御部17は、取得した他のモダリティのボリュームデータと、超音波診断装置100にて収集したボリュームデータとの位置合わせを実行する。例えば、制御部17は、非線形のワーピング処理や、平行移動及び回転などの線形処理を実行することで、他のモダリティのボリュームデータと、超音波診断装置100にて収集したボリュームデータとの位置合わせを実行する。
【0096】
そして、制御部17は、ボリュームデータの位置合わせを実行した後に、他のモダリティのボリュームデータ及び超音波診断装置100にて収集したボリュームデータそれぞれから画像を生成する。これにより、画像間で位置の対応関係を把握することができる。すなわち、制御部17は、例えば、現時点でフライスルー画像が描出している位置が他の画像でどこに相当するのかを矢印などで表示することが可能になる。なお、図17においては、他のモダリティの医用画像としてX線CT画像が示されているが、実施形態はこれに限定されるものではなく、例えば、MR画像を用いる場合であってもよい。
【0097】
(2)カーブドMPR画像の生成例
上述した第1及び第2の実施形態では、3軸上を進行するトレースラインの1軸を削除した平面画像をカーブドMPR画像として生成する場合について説明した。しかしながら、実施形態はこれに限定されるものではなく、例えば、トレースラインを直線にし、それに沿ってカーブドMPR画像を生成する場合であってもよい。
【0098】
また、3軸上を進行するトレースラインに沿って、3次元空間に曲面で示したカーブドMPR画像を生成する場合であってもよい。図18は、第3の実施形態に係るカーブドMPR画像生成の一例を説明するための図である。例えば、カーブドMPR画像生成部142は、図18の上図に示す管腔に設定されたトレースラインに沿って、図18の下図に示すように、3次元空間に実際の管腔と同様の曲面を有したカーブドMPR画像を生成する。
【0099】
以上説明したとおり、第1の実施形態、第2の実施形態及び第3の実施形態によれば、本実施形態の超音波診断装置及び画像処理装置は、管腔内を簡便に観察することを可能にする。
【0100】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
【符号の説明】
【0101】
1 超音波プローブ
10 装置本体
14 画像生成部
17 制御部
100 超音波診断装置
141 トレースライン設定部
142 カーブドMPR画像生成部
143 仮想内視鏡画像生成部
144 連結ボリュームデータ生成部
【特許請求の範囲】
【請求項1】
超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する設定手段と、
前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する生成手段と、
前記生成手段によって生成された2次元画像を所定の表示部にて表示させる表示制御手段と、
を備えたことを特徴とする超音波診断装置。
【請求項2】
前記生成手段は、前記芯線における任意の始点から終点までを含む断面の2次元画像を、前記3次元画像データから生成することを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記生成手段は、前記3次元画像データにおける前記芯線を含む任意の断面で前記2次元画像を生成することを特徴とする請求項1又は2に記載の超音波診断装置。
【請求項4】
前記生成手段は、前記設定手段によって設定された前記管腔の芯線に沿って、任意の視点及び視線方向からの仮想内視鏡画像をさらに生成し、
前記表示制御手段は、前記生成手段によって生成された仮想内視鏡画像を前記所定の表示部にて表示させる場合に、前記生成手段によって生成された2次元画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させることを特徴とする請求項1〜3のいずれか一つに記載の超音波診断装置。
【請求項5】
被検体に対する走査位置が異なる複数の3次元画像データを、当該3次元画像データに含まれる撮像対象部位における略同一位置にて合成した合成3次元画像データを生成する合成手段をさらに備え、
前記設定手段は、前記合成手段によって生成された合成3次元画像データに含まれる管腔に芯線を設定し、
前記生成手段は、前記設定手段によって設定された芯線を含む断面の2次元画像を、前記合成3次元画像データから当該芯線に沿って生成することを特徴とする請求項1〜4のいずれか一つに記載の超音波診断装置。
【請求項6】
前記表示制御手段は、超音波診断装置とは異なる医用画像診断装置にて生成された医用画像を前記所定の表示部にて表示させる場合に、当該医用画像及び前記生成手段によって生成された2次元画像上に、前記仮想内視鏡画像の視点及び視線方向の情報を連動して表示させることを特徴とする請求項4又は5に記載の超音波診断装置。
【請求項7】
超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する設定手段と、
前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する生成手段と、
前記生成手段によって生成された2次元画像を所定の表示部にて表示させる表示制御手段と、
を備えたことを特徴とする画像処理装置。
【請求項1】
超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する設定手段と、
前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する生成手段と、
前記生成手段によって生成された2次元画像を所定の表示部にて表示させる表示制御手段と、
を備えたことを特徴とする超音波診断装置。
【請求項2】
前記生成手段は、前記芯線における任意の始点から終点までを含む断面の2次元画像を、前記3次元画像データから生成することを特徴とする請求項1に記載の超音波診断装置。
【請求項3】
前記生成手段は、前記3次元画像データにおける前記芯線を含む任意の断面で前記2次元画像を生成することを特徴とする請求項1又は2に記載の超音波診断装置。
【請求項4】
前記生成手段は、前記設定手段によって設定された前記管腔の芯線に沿って、任意の視点及び視線方向からの仮想内視鏡画像をさらに生成し、
前記表示制御手段は、前記生成手段によって生成された仮想内視鏡画像を前記所定の表示部にて表示させる場合に、前記生成手段によって生成された2次元画像上に、当該仮想内視鏡画像の視点及び視線方向の情報を連動して表示させることを特徴とする請求項1〜3のいずれか一つに記載の超音波診断装置。
【請求項5】
被検体に対する走査位置が異なる複数の3次元画像データを、当該3次元画像データに含まれる撮像対象部位における略同一位置にて合成した合成3次元画像データを生成する合成手段をさらに備え、
前記設定手段は、前記合成手段によって生成された合成3次元画像データに含まれる管腔に芯線を設定し、
前記生成手段は、前記設定手段によって設定された芯線を含む断面の2次元画像を、前記合成3次元画像データから当該芯線に沿って生成することを特徴とする請求項1〜4のいずれか一つに記載の超音波診断装置。
【請求項6】
前記表示制御手段は、超音波診断装置とは異なる医用画像診断装置にて生成された医用画像を前記所定の表示部にて表示させる場合に、当該医用画像及び前記生成手段によって生成された2次元画像上に、前記仮想内視鏡画像の視点及び視線方向の情報を連動して表示させることを特徴とする請求項4又は5に記載の超音波診断装置。
【請求項7】
超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する設定手段と、
前記設定手段によって設定された芯線を含む断面の2次元画像を、前記3次元画像データから当該芯線に沿って生成する生成手段と、
前記生成手段によって生成された2次元画像を所定の表示部にて表示させる表示制御手段と、
を備えたことを特徴とする画像処理装置。
【図1】



【図2】

【図3】

【図4】

【図5】
【図6】
【図7】

【図8A】

【図8B】

【図9A】

【図9B】

【図10】

【図11】

【図12】

【図13】

【図14】
【図15】

【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9A】
【図9B】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−106903(P2013−106903A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256391(P2011−256391)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]