
株式会社IHIにより出願された特許
221 - 230 / 5,014
スクリュコンプレッサ用複合ロータ
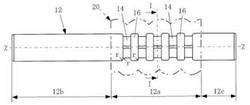
【課題】回転軸と歯形部の熱膨張係数が大きく相違する場合でも、界面の剥がれを抑制し、必要なスラストとトルクを伝達することができるスクリュコンプレッサ用複合ロータを提供する。
【解決手段】軸心Z−Zを中心に回転駆動される回転軸12と、回転軸の中央部外面にモールドされた歯形部20とを備える。歯形部20がモールドされる回転軸12の外面(モールド部12a)は、回転軸と同心であり回転軸と断面形状の異なるトルク伝達部分14を有する。
(もっと読む)
ロボットとそのワーク把持方法

【課題】トレイ窪みがワークより大きくその間に隙間があり、トレイ窪みの端面にワークが寄っており、かつ画像処理の計測誤差が大きい場合でも、ワークを傾けることなくトレイ上のワークをハンドで確実に把持することができるロボットとそのワーク把持方法を提供する。
【解決手段】(A)画像処理の計測誤差より大きく、トレイ窪み3とワーク1との平均隙間より小さいシフト量Lを予め記憶し、(B)カメラ14によりトレイ2に設けられたトレイ窪み3内に位置しているワーク1を、上方から撮影してワーク1の画像を取得し、(C)画像処理装置18により、前記画像を画像処理してワーク1の中心位置を検出し、(D)ロボット制御装置20により、把持高さにおいて、ハンド12をワーク1の検出された中心位置よりトレイ窪み3の内側に前記シフト量Lを水平シフトした後に、ワーク1を把持する。
(もっと読む)
多軸疲労寿命評価方法
【課題】負荷の大きさが複雑に変化する場合であっても、多軸負荷による疲労損傷を高精度に予測可能な多軸疲労寿命評価方法を提供する。
【解決手段】評価対象の主応力・主ひずみ面を決定し、負荷経路長さに対するSI(t)cosξ(t)の関係と、負荷経路長さに対するSI(t)|sinξ(t)|の関係とを求め、負荷経路長さに対するSI(t)cosξ(t)の関係の波形の解析を行い、疲労損傷に寄与する波を分割して抽出し、抽出した各波の応力範囲またはひずみ範囲ΔSIiと、非比例負荷係数fNP_iを求め、求めた非比例負荷係数fNP_iと応力範囲またはひずみ範囲ΔSIiとを基に、非比例負荷を考慮した応力範囲またはひずみ範囲ΔSIi_NPを波ごとに演算し、求めた応力範囲またはひずみ範囲ΔSIi_NPと、予め求めておいた単軸負荷時のSN線図とに基づいて演算した累積損傷を基に、構造物の疲労寿命を予測する。
(もっと読む)
圧縮機シール装置
【課題】ガスの漏れ抑制性能が高い圧縮機シール装置を提供する。
【解決手段】大内径部16、空洞部17、及び小内径部18を形成したガスシール3bと、外周面に周方向に延びるフィン10を複数条形成した大外径部11、外径変化部14、及び外周面に周方向に延びるフィン12を複数条形成した小外径部13を有するラビリンススリーブ15とを組み合わせ、オープンインペラ1を備えた圧縮機の稼働中に、外径変化部14側のガスの密度分布と空洞部17側のガスの密度分布との差が拡がるようにし、密度分布が小さいガスGをラビリンススリーブ15の小外径部13に沿って流通させる。
(もっと読む)
孔傾斜計測治具及び孔傾斜計測方法
【課題】計測対象孔の近傍に障害物がある場合であっても、信頼性の高い計測結果が得られる孔傾斜計測治具及び孔傾斜計測方法を提供する。
【解決手段】管孔加工面Wbに形成された管孔Waに挿入された状態でその中心軸線1a周りに回転可能なロッド部1と、ロッド部1に設けられ、中心軸線1aが延びる軸方向と直交する直交方向に延在するアーム部2と、アーム部2において上記直交方向に間隔をあけて設けられ、中心軸線1a周りにおける第1の位置にアーム部2が位置するときと、該中心軸線1a周りにおける上記第1の位置と異なる第2の位置にアーム部2が位置するときとの、管孔加工面Wbに対する上記軸方向における相対距離の変化を計測可能な複数の計測部3と、を有する孔傾斜計測治具A及び当該孔傾斜計測治具Aを用いた孔傾斜計測方法を採用する。
(もっと読む)
アレイアンテナ式のCVDプラズマ装置
【課題】アレイアンテナ式のCVDプラズマ装置1の生産性を高いレベルまで向上させつつ、薄膜の品質を高めること。
【解決手段】予め設定した配設方向の一端部側の基板エリアAとフロント壁9の壁面との間及び前記配設方向の他端部側の基板エリアAとリア壁11の内壁面との間に、片側に基板Wからの輻射熱を吸収可能な吸収面45fを有しかつ基板Wを冷却する冷却パネル41がそれぞれ配設され、隣接する基板エリアA間に、両側に基板Wからの輻射熱を吸収可能な吸収面57fを有しかつ基板Wを冷却する中間冷却パネル53が配設されたこと。
(もっと読む)
回転角検出装置と方法
【課題】コンプレッサハウジングを回転機械に取り付けた状態で、回転体におけるコンプレッサ側端部の磁化部による磁場を利用して回転角を検出する場合に、吸入ガスに干渉することなく、回転体の回転角を検出できる回転角検出装置を提供する。
【解決手段】コンプレッサハウジング9に設けた吸気穴9a内において磁化部3dに対向する位置に配置される磁気センサ15と、磁気センサ15を支持するセンサ支持部17と、磁気センサ15の出力信号に基づいて回転体3の回転角信号を出力する回転角出力部19と、を備える。センサ支持部17は、吸気穴9a内において、回転体3の中心軸Cの仮想延長線上に配置され、この状態で、センサ支持部17は、コンプレッサハウジング9の内周壁9bとの間に、コンプレッサ翼3aへ外部から軸方向に流れるガスの流路を形成しており、この流路は、中心軸Cを回る周方向に延びている。
(もっと読む)
組立ロボットとその制御方法
【課題】ワークを対象物に複数の動作で組み付ける場合に、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができる組立ロボットとその制御方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ハンドに作用する外力を検出する力センサ14と、3次元空間内でハンドの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置18とを備え、(A)各動作における組付け方向の外力の最大値を記憶し、(B)ロボットアーム16を制御して各動作を順次実行し、(C)各動作の実行中に、力センサ14で検出された組付け方向の外力が、各動作における最大値に達したときに、ロボットアーム16を停止する。
(もっと読む)
ターボ機械のロータ
【課題】疲労強度や製品寿命が向上するターボ機械のロータの提供。
【解決手段】回転軸6の端部6aに設けられると共に軸方向において第1の線膨張係数を有する羽根車11と、回転軸6の端部6aに向けて羽根車11を軸方向に締め付けると共に軸方向において第1の線膨張係数よりも大きな第2の線膨張係数を有するテンションボルト13と、テンションボルト13によって回転軸6の端部6aに向けて羽根車11と共に軸方向に締め付けられ、軸方向両側における接触端面14aが該軸方向に対して垂直に形成されると共に第2の線膨張係数よりも大きな第3の線膨張係数を有する熱膨張部材14と、を有するターボ圧縮機1のロータ100を採用する。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
221 - 230 / 5,014
[ Back to top ]