
Fターム[2B034BE06]の内容
土作業機(その他) (8,058) | 土管理用機械等の取付け又は補助走行装置 (199) | 走行装置又は安定機構 (57) | 尾輪、前輪等の安定車輪 (35)
Fターム[2B034BE06]に分類される特許
1 - 20 / 35
歩行型耕耘機
【課題】
本発明は、培土作業、運搬作業、耕耘作業を切り換え易くすることを課題とする。
【解決手段】
機体に操作ハンドル(13)と耕耘部(K)を設け、耕耘部(K)の後方には畝を形成する培土板(B)と、左右一対の転輪(17)を設けた歩行型耕耘機において、培土板(B)の培土面を平面状に形成し、培土板(B)の後方に転輪(17)を設け、培土板(B)と転輪(17)は連結板(31)を介して連結する構成とし、畝を形成する培土作業時には培土板(B)の下端部及び転輪(17)が圃場に接地する構成とし、運搬作業時には運転者が操作ハンドル(13)を押し下げると、転輪(17)が接地状態で、耕耘部(K)及び培土板(B)の下端部が圃場から上方に離間する位置となることを特徴とする。
(もっと読む)
カルチベータユニットの深度制御車輪用スクレーパ

【課題】深度制御車輪の土を畝に飛散させず、且つ、異径の制御車輪に共用できるカルチベータ用スクレーパを提供する。
【解決手段】カルチベータユニットの先端支持フレームに軸着される深度制御車輪のスクレーパにおいて、先端部に前記深度制御車輪の支軸への係合孔を有し、且つ、前記車輪支軸から前記車輪の側面に沿って車輪後方に延びる左右側板の後端間に、所定の奥行巾を有するスクレーパプレートをその前・後そぎ取り縁辺を逆転可能に固定したコの字状の枠体にしてスクレーパを構成する。前記スクレーパプレートをその基盤を左右逆に組み換えるか、もしくは、その取付け基盤の支点を中心に反転させて前記支軸とスクレーパプレートの前部縁辺間の距離を可変に組み付けることができる構成とした。
(もっと読む)
歩行型管理機
【課題】アタッチメントとして提供されている従来の培土器を使用することなく、うね立て作業を可能にすると共に、培土板を取り外すことなく、通常の耕耘作業を可能にする。
【解決手段】機体から左右外側方に延出する車軸9に、複数の耕耘爪10を備える車軸耕耘式の歩行型管理機1であって、機体の後部に、圃場に接触して走行抵抗を発生させる抵抗棒13用の取付部(作業機連結ヒッチ12)と、機体移動時に機体後部を支える移動尾輪21用の取付部とを備え、該移動尾輪21用の取付部を、移動尾輪21を接地高さに保持する下降姿勢と、移動尾輪21を非接地高さ保持する上昇姿勢とに回動変姿自在な移動尾輪ブラケット20で構成すると共に、該移動尾輪ブラケット20に、うね立て用の培土板24を設ける。
(もっと読む)
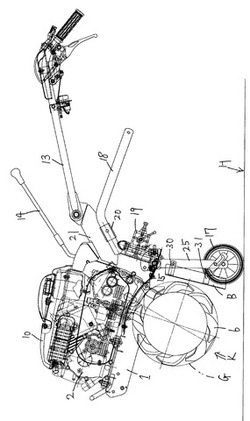
歩行型管理機
【課題】ゴムたれにより簡単に畝立て作業ができる歩行型管理機を提供する。
【解決手段】尾輪体30は、耕耘装置11から後方に突設される補助フレーム31と、補助フレーム31から下方へ突設される第一支持杆32と、前記第一支持杆に対して、回動可能に取り付けた第二支持杆33と、前記第二支持杆に回転可能に取り付けられる尾輪34と、前記第二支持杆を前記第一支持杆に対して、任意の回動位置に保持する保持手段50とを具備し、前記耕耘装置と前記尾輪体との間に、該耕耘装置を後方から覆うゴムたれ15を具備し、前記第二支持杆を、前記尾輪が前記耕耘装置の最下位置よりも上方に位置するように保持手段により保持した状態で、前記尾輪体を構成する第一支持杆は、前記ゴムたれの左右中央部に当接可能とし、前記ゴムたれの左右両側により、前記耕耘装置で掘り起こされた土壌を左右に押して、畝立て作業を可能とした。
(もっと読む)
草刈り作業機
【課題】作業部のオフセットが可能で、刈取り作業部の姿勢調整等が容易に行えて作業に熟練を要さない草刈り作業機であり、構造が簡易で生産コストを押さえた草刈り作業機を提供する。
【解決手段】トラクタに装着される装着部2と、装着部2に回動基部を設け左右方向に移動可能な平行リンクで構成されたオフセット機構部6と、オフセット機構部移動端側には、トラクタからの動力により回転する刈刃を有した刈取り作業部5と、刈取り作業部5後方には刈取り高さを安定させるゲージローラ7が設けられていて、前記装着部2には、装着部2の下降位置を規制する下降規制手段8が設けられていて、これにより刈取り作業部5の作業姿勢を安定させ、容易に草刈り作業ができる草刈り作業機による。
(もっと読む)
草刈り作業機
【課題】作業部をオフセットさせての作業が可能で、刈取り作業部の位置や姿勢調整等が容易に行える草刈り作業機であり、トラクタへの装着が簡易な草刈り作業機を提供する。
【解決手段】トラクタ装着部2に回動基部を設けた平行リンクで構成されたオフセット機構部6移動端側には刈取り作業部5が設けられていて、オフセット機構部6は、オフセット用電動シリンダ63の伸縮により移動可能であり、刈取り作業部5はトラクタ進行方向と直交する方向の上下方向に刈取り部回動用電動シリンダ54の伸縮により回動自在で、回動量をトラクタ運転席から目視確認可能な確認ゲージが設けられ、各電動シリンダの伸縮は運転席に設けた電動操作部により遠隔操作可能である草刈り作業機による。
(もっと読む)
畦塗り機
【課題】適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機は、トラクタに連結する機体を備える。機体には、土を耕耘して盛り上げる盛土体およびこの盛土体による盛土を締め固めて畦を形成する畦形成体を回転可能に設ける。機体には、下端部が圃場表面部に刺さり込んだ状態で進行方向に移動する方向輪26を上下動可能に設ける。機体には、方向輪26の機体に対する上下動を規制するロック状態および方向輪26の機体に対する上下動を許容するロック解除状態に選択的に切り換え可能なロック手段91を設ける。
(もっと読む)
歩行型管理機
【課題】シート部材をロータリ耕耘装置の後端部から取り外すことなくメンテナンス作業を行うことが可能な歩行型管理機を提供する。
【解決手段】歩行式管理機に、ロータリ式耕耘装置40と、上端部が耕耘カバー45の後端部に固定され、下左端部に左係止孔61Lが形成され、下右端部に右係止孔が形成され、耕耘カバー45の後端部から下方に垂れ下がるゴム垂れ60と、ゴム垂れ60の左上端部を耕耘カバー45の後左端部に着脱可能に固定するノブネジ72Lと、ゴム垂れ60の右上端部を耕耘カバー45の後右端部に着脱可能に固定するノブネジと、を具備し、ゴム垂れ60の左係止孔61Lをノブネジ72Lに係止するとともにゴム垂れ60の右係止孔をノブネジに係止する。
(もっと読む)
カルチベータユニットにおける深耕作業機と砕土均平ローラ装置の取付構造及びこの構造に使用する取付装置
【課題】深耕作業機の安全ボルトが折れても、後方の砕土均平ローラ装置が衝撃を受けない構造のカルチベータユニットを提供する。
【解決手段】中骨ビーム5に深耕作業機8のシャンク10を取り付けるとともに、深耕作業機8取り付け部の後方に砕土均平ローラ装置9を取り付けたカルチベータユニット3において、前方の深耕作業機のシャンク10又はこのシャンク10を支持するチャック部材11を、枢軸支持ボルト12と安全ボルト13を介して前記中骨ビーム5に支持させる。後方に向けて砕土均平ローラ装置9を一体結合手段を介して支持するベースブラケットを、前記中骨ビーム5に枢軸支持ボルト12を介して回動可能に軸着する。枢軸支持ボルト12と安全ボルト13で取り付けた前記深耕作業機のシャンク10又はチャック部材11に係合して一体に変位する連繋部材を、前記ベースブラケットに一体又は連動可能に結合する。
(もっと読む)
歩行型管理機
【課題】ロータリ耕耘装置により耕耘された土壌に形成される溝の幅を容易に調整することが可能な歩行型管理機を提供する。
【解決手段】歩行型管理機10に、ロータリ式耕耘装置40と、上端部がロータリ式耕耘装置40の耕耘カバー45の後端部に固定されるとともに耕耘カバー45の後端部から下方に垂れ下がるゴム垂れ60と、ゴム垂れ60の上端部における左半部の中途部から右半部の中途部までの部分を耕耘カバー45の後端部における左半部の中途部から右半部の中途部までの部分に固定する上中央部固定部材71と、ゴム垂れ60の左上端部および右端部をそれぞれ耕耘カバー45の後左端部および後右端部に着脱可能に固定するノブネジ72L・72Rと、ゴム垂れ60の下端部かつ左右中央部となる部分を耕耘カバー45の後端部かつ左右中央部となる位置からさらに後下方となる位置に保持するアーム85と、を具備した。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、地面に接地する起立姿勢と地面から離れる収容姿勢とに姿勢変更可能に構成された補助輪体40を取り付ける。補助輪体40は、上端側を回動支点として機体1に上下回動可能に取り付けられたスタンド部41と、スタンド部41の下端側に回転可能に設けられた補助輪42とを備える。
(もっと読む)
歩行型管理機
【課題】歩行型管理機において、揚土作業時に、ハンドル逆姿勢の操向ハンドルを持ち上げながら歩行型管理機を前進させて、耕耘機構の浮き上がりを防止する作業をなくす。
【解決手段】本願発明に係る歩行型管理機は、機体1に搭載された動力源7と、前記機体1の下方に前後に並べて配置された左右一対の走行部2及び耕耘機構3と、前記機体1の上部に向き変更可能に設けられた操向ハンドル4とを備える。前記機体1のうち前記走行部2を挟んで前記耕耘機構3と反対側の端部には、前記耕耘機構3を進行方向前側にして進行する際に接地して前記走行部2と共に前記機体1を支持する補助輪体40を昇降調節可能に取り付ける。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
中耕除草機及び中耕培土作業方法
【課題】条間の幅に応じた中耕ディスクの位置変更作業を容易にし、また中耕作業と培土作業の切替作業が容易で、ディスクに設けたスクレーパの数を減らす。
【解決手段】作物の条間を進行しながら条間の土を中耕培土する中耕ユニット20と、これを支持するメインフレーム3を備えた中耕除草機であって、中耕ユニット20は、メインフレーム3に前端側が接続されて進行方向後側へ張り出す支持フレーム21と、支持フレーム21に設けられ、条間の幅方向に突没且つ突出長さ調整が可能な一対のアーム支持部40と、回転自在に支持されて進行方向に対するディスク62の角度を調節した状態で保持される後列ディスク60とを有する。後列ディスク60は、アーム支持部40に対して着脱可能であり、一方のアーム支持部40の支持位置に進行方向に対するディスク62の角度を同一にしたままで他方のアーム支持部40に取り付け可能である。
(もっと読む)
ディスク式中耕除草機
【課題】3連の中耕ユニットの培土量をほぼ一致させることができるディスク式中耕除草機を提供する。
【解決手段】3連の中耕ユニット13〜15のうち、左右の中耕ユニット14,15は水平状態を保持したまま上下動しないように第1及び第2のロック機構部25,26によってメインフレーム11に固定し、中央の中耕ユニット13だけを圃場の凹凸に追従して上下動させるようにする。これにより、走行機体の車輪Tの踏圧により沈下した左右2つの条間の耕深と、膨軟な中央の条間の耕深をほぼ同等にすることができ、第1〜第3の中耕ユニット13〜15の培土量をほぼ一致させることができる。
(もっと読む)
圃場用砕土装置
【課題】 良好な砕土作用を有し、とりわけ水田の耕作において“トロトロ層”を作るのに適した圃場用砕土装置を提供することである。
【解決手段】 地面に対してほぼ直交するように回転可能に配置された複数のディスク(18)と、ディスクの外周に所定間隔隔てて放射状に取り付けられた複数のブレード(20)とを備え、ブレードが、ディスクとの取付部である基端の幅よりも先端の幅が大きい正面視でほぼ台形状の形状を有するとともに、側面視で一方に湾曲した形状を有し、各ブレードが、ディスクを含む平面に対して外方に鋭角度傾斜した状態で、かつ、回転方向と反対方向に湾曲するような状態でディスクに固定されていることを特徴とする圃場用砕土装置(10)が提供される。
(もっと読む)
回転式除草および砕土装置
【課題】 効率的な除草および砕土作業を可能にする装置を提供することである。
【解決手段】 除草・砕土輪(36)を備え、除草・砕土輪が、ほぼ円板状のディスク(36a)と、ディスクの外周に所定間隔隔てて放射状に取り付けられた複数の第1ブレード(36b)と、第1ブレード間に放射状に取り付けられた複数の第2ブレード(36c)とを有し、第1ブレードが、僅かに湾曲させた細長いプレートの基端をディスクを含む平面にほぼ一致するようにディスクの外周に固定されており、第2ブレードが、第1ブレードよりも長く且つ第1ブレードよりも湾曲させた細長いプレートの基端をディスクを含む平面に対して鋭角度をなして傾斜するようにディスクの外周に固定されていることを特徴とする回転式除草および砕土装置(30)が提供される。
(もっと読む)
除草機
【課題】回転円板の下面に凸条体を設けて表土を掘削しながら除草する除草機において、土壌の飛散を防止するカバーの取り付け構成の合理化を図る。
【解決手段】後端にエンジンを装着し該エンジンの動力を伝動する伝動軸2を内装し、先端側には伝動ギヤボックス4を設けた筒体フレーム3に、前記伝動ギヤボックス4に設けられ前記伝動軸2に連動して回転する縦駆動軸5を設け、該縦駆動軸5には下面に爪体7,7…を配設した円板6を固定し、前記筒体フレーム3部との装着部を支点として上下に揺動可能で且つ筒体フレーム3に対して任意の角度で固定可能なカバーフレーム16を設け、該カバーフレーム16に、前記円板6の周部の全部又は一部を覆うカバー体を設ける。
(もっと読む)
畝成形機
【課題】 ロータリ耕耘装置の後方に、該ロータリ耕耘装置で耕耘された土で畝を成形する畝成形具を備えると共に、この畝成形具の側方に圃場に接地して機体荷重を支えるゲージ体を備え、走行体の後部に装着されて圃場を移動しながら該圃場に畝を成形する畝成形機において、既成形畝に一部オーバーラップさせながら該既成形畝に隣接する畝を成形する際に、前記既成形畝の、崩された側の上面を修復することができ、しかも、畝上面に対する上面成形具の押え力を十分に確保できる畝成形機を提供する。
【解決手段】 既成形畝R2に一部オーバーラップさせながら該既成形畝R2に隣接する畝R1を成形する際に、前記既成形畝R2の、崩された側の上面Raを修復する上面成形具66を設け、この上面成形具66を、前記ゲージ体37に立設された支持体67に設ける。
(もっと読む)
畦塗り機
【課題】圃場条件に拘わらずに前処理体及び整畦体の整畦作業により発生する反力をコールタが受けて、走行機体の直進性を向上させる。
【解決手段】畦塗り機1は、前処理体21及び整畦体25の整畦作業により発生する反力を受けるコールタ60を備える。コールタ60は、オフセット機構部40から伝達される動力を前処理体21及び整畦体25に振り分ける動力伝達機構を有した支持ケース29の後端部に上下方向に回動自在なコールタ支持部材62を介して設ける。コールタ支持部材62は昇降シリンダ63によって回動してコールタ60を上下方向に移動させる。コールタ支持部材62にセンサアーム66を上下回動自在に設け、センサアーム66の枢支部66aにポテンショメータ68を設ける。ポテンショメータ68の信号は制御装置に伝達され、制御装置はポテンショメータ68の信号に応じて昇降シリンダ63の作動を制御してコールタ60の刺さり込み量を一定にする。
(もっと読む)
1 - 20 / 35
[ Back to top ]