
Fターム[2B043DC03]の内容
農業機械一般(操向) (6,001) | 走行装置の構成、配置又は取付け (202) | 車輪 (94)
Fターム[2B043DC03]の下位に属するFターム
補助車輪、尾輪、そり又は抵抗体 (9)
Fターム[2B043DC03]に分類される特許
21 - 40 / 85
水田作業車
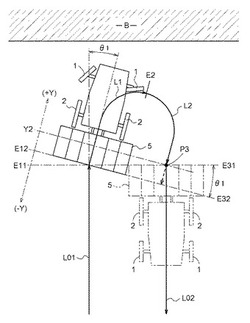
【課題】水田作業車において、人為操作具及び前輪の操向操作による作業装置の非作業状態への操作により旋回開始位置が検出された場合、作業終了位置(旋回開始位置)と作業開始位置(旋回終了位置)とが、畦から略同じ位置になるように構成する。
【解決手段】人為操作具による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E31と、前輪1の操向操作による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E32との差が小さくなるように、旋回終了位置E32を機体の旋回行程L1,L2に沿って旋回開始位置E12側に移動させる(θ1,E31参照)。
(もっと読む)
乗用型作業機

【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 機体にエンジンからの動力を各別に入り切りする左右サイドクラッチ(SC)を介して駆動される左右後輪を設け、作業装置を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置(S)を設け、該検出装置(S)は、回転検出用の歯車回転体(K)の回転数を検出する構成とした。
(もっと読む)
移植機
【課題】部品の兼用化を図り、部品点数及びコストを削減する
【解決手段】ステアリングハンドル16の旋回操作に応じて、旋回内側の後輪7に対する動力伝動を自動的に断つ乗用型田植機であって、サイドクラッチ13のシフタアーム14を前輪操向機構17に連繋させ、ステアリングハンドル16の旋回操作に応じて、旋回内側のサイドクラッチ13を自動的に切り作動させるサイドクラッチ連繋機構29を備え、該サイドクラッチ連繋機構29は、ピットマンアーム22との当接により回動するカム部材31と、各サイドクラッチ13のシフタアーム14をカム部材31に連繋させる左右の連繋リンク32とを備えると共に、カム部材31を、ステアリング減速軸24を支点として回動させる。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置の検出に基づいて作業クラッチが自動的に伝動状態に操作されるように構成した場合、作業クラッチの伝動状態への操作が適切に行われるように構成する。
【解決手段】田面に接地して次の作業行程L02の指標を田面に形成する作用姿勢と、田面から上方の格納姿勢とに操作自在な右及び左のマーカー19を備える。旋回終了位置E3の検出に基づいて、作業クラッチを伝動状態に操作する操作手段を備える。旋回開始前の作業行程L01において、右又は左のマーカー19が作用姿勢に操作されていると、操作手段が作動する。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
農作業車
【課題】 往復植付け走行から枕地の周回植付け作業に入った時に、不適正な農作業装置の稼動を回避できるように制御すると共に、マーカの作動精度上昇によって作業性が向上する農作業車を提供する。
【解決手段】 機体の旋回動作を検出する旋回検出手段により検出される旋回開始のタイミングと対応して農作業装置の停止と走行距離計の計測開始を指令し、その走行距離から判定される旋回完了による次行程の作業開始位置への到達によって上記農作業装置の稼動を指令する旋回制御を行う制御処理部を備える農作業車において、左右の後輪の回転数を検出する回転センサーに基づき、左右のマーカのうち回転数の多い側のマーカを出す制御を行う。
(もっと読む)
水田作業機の走行変速操作構造
【課題】変速レバーに多くの機能を与えることにより、水田作業機の操作性を向上させる。
【解決手段】変速レバー11を前進変速操作径路Fにおいて中立位置Nから高速位置側へ操作するに連れてエンジン8の調速機構25を高回転側に作動させ、変速レバー11を中立位置N側へ操作するに連れて調速機構25を低回転側に作動させるように設定する。水田作業装置への動力伝達を断続する作業クラッチ60を入り切り操作する指操作可能なスイッチを、変速レバー11の握り部に備える。走行機体の操向操作に連動して水田作業装置を自動的に上昇させるオートアップ制御手段を備える。
(もっと読む)
田植機
【課題】 圃場の往復作業走行の折返し部に来た際に、植付部の取扱いを要することなく機体を旋回することができるとともに、一連の動作を継続することが可能となる田植機を提供することにある。
【解決手段】 旋回操作の検出に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されてその作業位置まで下降して植付作業をする植付部と、この植付部の上昇、下降、植付稼動、植付停止の各動作を制御する制御部とを備えた田植機において、上記制御部は、畦際まで前進して停車し、植付部を非作業位置に上昇し、後退して旋回するバック旋回時に、機体走行中の旋回操作の検出に応じて作業位置への下降、植付稼動までの一連の動作を制御する旋回連動制御を行う構成とした。
(もっと読む)
田植機
【課題】 本発明の課題は、オペレータの操作負担を低減するべく、幅広い条件に適用可能な田植機を提供する点にある。
【解決手段】 植付部を備えて走行下で植付作業をするための機体の旋回動作を制御するとともに、その旋回動作と連動して上記植付部の動作を制御する制御部を備える田植機において、上記制御部は、距離カウントが第1の旋回距離になるまで待機し、第1の旋回距離になったら旋回操作中であることを条件に植付部を下降させ、続いて、植始め自動切替スイッチが入であることを条件に、距離カウントが第2の旋回距離になるまで待機し、第2の旋回距離になったら自動で植付部を稼動させる状態と、手動で植付部を稼動させる状態とに切替可能であるターン制御手段を備える。
(もっと読む)
走行車両
【課題】圃場がどのような状態であっても旋回内側の後輪による圃場の荒らしが軽減できる乗用型作業機などの走行車両を提供することである。
【解決手段】ステアリング機構(86I、180、217など)に連動して旋回内側の後輪11の駆動を断続的に入/切する継続的入り切り制御機能(A1)と旋回内側の後輪11の駆動を断続的に入/切する断続的入り切り制御機能(B1)とを備え、且つ車体2の旋回時において、昇降リンクセンサ48により測定される圃場深さに応じて継続的入り切り制御機能(A1)又は断続的入り切り制御機能(B1)を選択する処理を行う入り切り制御選択機能を有する制御装置163を設ける。圃場の状態に合わせて継続的入り切り制御機能(A1)又は断続的入り切り制御機能(B1)が選択されるため、圃場深さに応じた作業車両の走行旋回の細かい制御が可能となる。
(もっと読む)
田植機
【課題】 圃場の往復作業走行における苗植付け等の水田作業に支障を来すことなく、畦際部分の機体旋回による圃場の荒れに対して適正な水田作業が可能となり、さらに、植付部を適正に稼動することができる田植機を提供することにある。
また、土壌の脆さに起因する旋回抵抗の増加との関連性に基づき、圃場の凹凸を強力に均平して、機体の沈没を防止でき、適正な水田作業が可能となる田植機を提供することにある。
【解決手段】 機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部22を備える田植機において、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、植始め自動切替スイッチ23が入であることを条件に、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
散布作業車
【課題】本発明の課題は、薬液タンクの後方にサブタンクをトレーラーに搭載して牽引可能に装備し、タンク容量を大幅にアップして、作業能率の向上を図る。しかも、トレーラーは左右の車輪を操向操舵可能に構成することで、旋回時の泥押しを抑制し機体の旋回を円滑にすることを目的とする。
【解決手段】自走しながら圃場の作物に薬液を散布する散布作業車において、車体後部に搭載した薬液タンク5の後方に薬液サブタンク13をトレーラー14に搭載して牽引可能に装備し、トレーラー14の左右車輪15,15を左右方向に操向操舵可能に構成してあることを特徴とする。そして、左右の車輪15,15はアクチュエータ20を介して操向操舵する構成とすると共に、このアクチュエータを駆動操作する操舵スイッチ19は薬液を散布制御する防除コントローラ部12近くに集中配備してあることを特徴とする散布作業車の構成とする。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
苗植機
【課題】
左右前輪、左右後輪が畝溝を走行し、機体の左右への倒れを防止しながら畝溝に隣接する左右の畝の左右両側部に苗の植え付け作業をする苗植機を提供する。
【解決手段】
上下動機構4により上下動して圃場に苗を植え付ける左右苗植付け体5、左右苗植付け体5へ苗を供給する苗供給装置24、苗落下供給機構27等を備えた苗植機において、左右前輪6及び後輪7のトレッドを幅狭に構成し、左右転倒防止輪141のトレッドを幅広で且つ左右前輪6及び後輪7よりも高位に位置するように構成し、左右前輪6及び後輪7が畝溝UMを走行し、左右転倒防止輪141が畝溝UMに隣接する左右の畝U上面を走行しながら、左右苗植付け体5により畝溝UMに隣接する左右畝Uの左右両側部に苗を植え付ける。
(もっと読む)
作業機の操向角検出構造
【課題】単一センサで操向角度センサを構成できる良さを生かしながら、操向角度センサの取付位置を合理的に設定して、故障等を未然に回避して信頼性の高い作業機の操向角検出構造を提供する。
【解決手段】前輪の操向角度を検出する操向角度センサ47と繰向部材41とを連係機構Bによって連係する。連係機構Bを、繰向部材41より後方に延出された連係ロッド48と、その連係ロッド48の作動を伝達する上下向き姿勢の回転連係軸49とで構成し、操向角度センサ47を前記回転連係軸49の上端部に連係させてある。
(もっと読む)
乗用作業機
【課題】本発明は、旋回時の操作の煩わしさを排除して、旋回に係る操作性を大幅に高めることができる乗用作業機を提供することを課題とする。
【解決手段】乗用作業機としての乗用芝刈り機10は、操舵ハンドル21が所定の角度を超えて転舵されたか否かを検出する舵角センサ31を備え、車速制御レバー28が、予め定めた車速を超えた範囲に設定されたか否かを検出するレバー位置検出センサ29を備え、レバー位置検出センサ29から車速が予め定めた車速を超えた範囲に設定されているとの位置情報および舵角センサ31から舵角が所定の角度を超えた範囲に設定されているとの転舵情報の情報を受けたときにエンジン12の回転速度を絞る減速制御を実施する制御部33が設けられている。
(もっと読む)
苗植機の苗植制御装置
【課題】 苗植条行程の終端部で走行方向の折返旋回操向を行うときは、操作タイミングが難しく、このタイミングのずれによって苗植付け条間間隔や、植付位置の不揃い等が生じ易い。
【解決手段】 ステアリングハンドルの操向により、車体に対して苗植装置を上昇すると共に、植付クラッチ5を切りにして走行旋回する苗植機において、この折返し走行旋回位置をGPSから入力することことによって、前記苗植装置を下降して植付クラッチ5を入りにする。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
乗用作業機
【課題】乗用作業機の畦越えや車両への積み降ろし時の自走移動を、地上からの操縦によって安全かつ的確に行えるようにする。
【解決手段】走行機体3の前部に、走行機体3側に後退した第1姿勢と、走行機体3の前方に突出した第2姿勢とに切り換え可能に構成した握り操作具16を備え、握り操作具16を第2姿勢に切り換えた状態での握り操作具16の下方への押し下げ操作により前輪1の操向作動を牽制阻止するように構成する。
(もっと読む)
21 - 40 / 85
[ Back to top ]