
Fターム[2B043DC03]の内容
農業機械一般(操向) (6,001) | 走行装置の構成、配置又は取付け (202) | 車輪 (94)
Fターム[2B043DC03]の下位に属するFターム
補助車輪、尾輪、そり又は抵抗体 (9)
Fターム[2B043DC03]に分類される特許
61 - 80 / 85
農作業車の畝間誘導装置
【課題】 曲線的な畝の農地でも、農作業車を畝間の中央方向に自動的に誘導し、タイヤで畝を傷付けることのなく安心して農作業ができ、且つ農作業車の方向転換も容易に行える畝間誘導装置を提供する。
【解決手段】 車体1の最先端下部1cに、先端9aに枢支部10を備えた支持片9を前方に向けて突設し、該枢支部10に両斜め前側方に車輪軸受部を有する左右の腕状軸11を上下擺動可能に枢支し、該腕状軸11の両車輪軸受部12、13に、左右の誘導車輪14、15を、腕状軸11が下向き状態のときに、左右の誘導車輪14、15が正面から見て下開きのハ字型になるように左右対称に傾斜させて回転フリーに装着する。前記腕状軸11は、側面から見た車輪軸受部12、13の位置が支持片の枢支部10の真下方向から前下方へ約45度までの範囲内の前方下がり角度となる長さに設定する。
(もっと読む)
畦塗り機及びその作業部向き調整方法

【課題】圃場の隅まで連続的に畦塗り作業を行なう。
【解決手段】畦塗り機1は作業部30を旧畦U0の一辺Faに沿うように作業部の向きを調整可能な作業部位置調整装置61を有する。作業部位置調整装置61は、オフセットフレーム10の後端部に回動自在に設けられた作業部30の向きが旧畦U0の一辺Faと略平行にあるか否かを走行機体80から目視確認可能なマーカ64と、オフセットフレーム10を旋回動させる旋回シリンダ13及び作業部30を回動させる回動シリンダ57の動作を操作可能なアクチュエータ操作装置67を有する。走行機体80に搭乗した作業者Mは、マーカ64を目視して作業部30の向きが一辺Faと略平行になるようにアクチュエータ操作装置67を操作する。
(もっと読む)
作業機の昇降制御装置
【課題】作業機の畔際での旋回時に作業装置を昇降制御するにあたり、次の作業行程の作業開始位置を揃える。
【解決手段】走行車体に対して昇降する作業装置を設け、走行車体の旋回時における所定の第一の過程で作業装置を上昇させ、所定の第二の過程で作業装置を下降させる昇降制御手段を設ける。そして、ステアリングハンドルの操作スピードが速いときには、昇降制御手段の作業装置の下降速度を速くなるように構成する。
前記構成によると、ステアリングハンドルの操作スピードが速いと、旋回時の作業装置の昇降速度が速くなるので、次の作業行程の作業開始遅れを防止し、次の作業行程への移行を円滑にすることができる。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
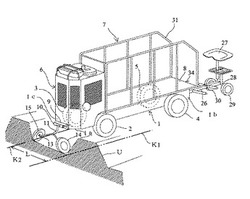
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
走行台車の操向装置
【課題】全方位移動可能であるうえに実用性に優れ、しかも狭い畝間でも走行することが可能な走行台車の操向装置を提供する。
【解決手段】タイヤ33及びタイヤホイール34からなる車輪部35と、タイヤホイール34に組み付けられて車輪部35を回転駆動するインホイールモータ36と、タイヤ33のタイヤ中心線Z1上に配置されて車輪部35を回転可能に支持する車輪フレーム37と、車輪フレーム37を支持すると共に、車輪フレーム37を軸廻りに回動させて車輪部35を操向する駆動支持部38とを備えた操向装置30を、走行台車20の四隅に配設する。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
苗移植機
【課題】比較的小さな圃場であっても小回り性能に優れた苗移植機を提供すること。
【解決手段】走行車体1の後側に昇降可能に設けた苗植付部7と旋回時に旋回内側の後輪3の駆動力を切断する左右一対設けたギア伝動系のサイドクラッチ体33を備え、後輪3,3を、車体進行方向に向かって苗植付部7の植付条全条分を跨ぐ左右の位置と該左右位置より内側に一方の後輪3が位置するように左右位置を切替可能に設けた苗移植機であり、車輪トレッドを車体支持のために維持しながら、左右一方の旋回は小回りできる。通常位置より内側に位置させた一方の後輪3を旋回外側とする場合には、内側に位置させていない後輪3のサイドクラッチ体33を切り、さらにサイドブレーキ体35を作動させて旋回させ、内側に位置させた一方の後輪3を旋回内側とする場合には、該内側に位置させた後輪3のサイドクラッチ体33を切り、フリー回転とする旋回をさせる。
(もっと読む)
農作業機の走行装置
【課題】 苗移植機のように圃場の一定方向に沿って平行方向の苗植付条を形成するように作業する形態が一般的である場合、未耕起の圃場面や、平面耕起による圃場土壌面での作業では、対地作業の平行的走行が難しく、不揃いの作業形態となり易く、高度の作業操作感覚、及び操作技術を要することとなる。
【解決手段】 左右一対の走行車輪1を有する対地作業機において、左右各車輪1の土壌踏面幅を作溝する作溝器2を配置して、この作溝器2による左右各作溝条底に沿って各車輪1を踏圧案内させて走行させることを特徴とする農作業機の走行装置の構成とする。
(もっと読む)
苗移植機
【課題】畝溝の幅が異なるいずれの圃場に対しても、前輪と鎮圧輪を畝溝上を直進性良く走行させることができる苗移植機を提供すること。
【解決手段】左右一対のガイド輪8,8はガイド輪軸17eに支持されるが、該ガイド輪軸17eのガイド輪取付位置は左右方向に変更可能であるので、畝溝の幅に合わせてガイド輪軸17eの左右方向幅を調整して、ガイド輪8,8の左右に畝Uの傾斜面の下端部に当接させた状態で、機体を畝溝に沿って前方に案内することができる。こうして後輪2が畝Uの上面を走行する構成でありながら、前輪3及びガイド輪8,8により、精度良く機体の進行方向を維持できる。また、ガイド輪8,8の間には前輪3があり、該前輪3のタイヤ幅は苗植付具60が苗を植え付け易い大きさに設定されている。また前輪3の畝溝鎮圧力はスプリング3bで付勢された支持部材17cで調整して、圃場の硬さに応じて変更可能になっている。
(もっと読む)
ソーラー芝刈り機
【課題】太陽電池を用いて、自動芝刈り機構における走行制御手段をコストの低いものとする。
【解決手段】減速装置4を取付けた走行モータ1を車台7に設けてなる走行機構に、刈刃と刈刃駆動モータ3と減速装置6からなる刈刃駆動機構を取り付け、磁気識別センサ11,12を当該車台前端部左右それぞれに設け、当該走行モータ端子の両端それぞれにリレーの接点を接続し、当該リレーのコイル端子と当該磁気識別センサの出力端子を接続し、当該走行モータと当該リレーを介して接続する当該磁気識別センサは当該車台左右反対位置に配置し、太陽電池を当該車台に取付け、当該リレーや当該磁気識別センサからなる走行制御機構と当該走行機構と当該刈刃駆動機構を当該太陽電池に接続し、当該走行機構と当該刈刃駆動機構並びに当該走行制御機構と当該太陽電池13を備える。当該車台を磁気を帯びたもので囲われた場所に配置する。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
三輪管理機
【課題】 本発明は、転舵時における運転者の負担が小さく、且つコストが嵩まない三輪管理機を提供することを課題とする。
【解決手段】 エンジン21で左右に備える2個の後輪18L、18Rを流体変速機22L、22Rを用いて駆動すると共に発電機52を回し、この発電機52で発電した電気を電動モータ14に供給し、この電動モータ14を用いて操舵輪である1個の前輪13を駆動する三輪管理機10において、この三輪管理機10は、前輪13の転舵角が大きくなるほど、外側後輪18R(又は18L)の回転速度に対して内側後輪18L(又は18R)の回転速度を減少させるごとくに、前輪13の転舵角に基づいて内側後輪18L(又は18R)及び前輪13の回転速度を制御する制御部51を備える。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、複数の農作業動作にも対応することが可能な作業車輌を提供する。
【解決手段】 農作業中に入設定すべき制御グループAの自動制御機能110を入設定にすると共に、農作業状態に合せて選択すべき制御グループBの自動制御機能120のそれぞれを個別に入切設定し得る作業モード101と、制御グループA及び制御グループBの自動制御機能110,120を全て切設定にする走行モード100と、制御グループA及び制御グループBの自動制御機能110,120のそれぞれを個別に入切設定し得るユーザ設定モード102とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。このモード選択により、入切設定の一括操作を可能にするものでありながら、複数の農作業動作にも対応する。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
スリップ防止システム
【課題】 従来のスリップ防止システムでは、スリップが発生した場合にエンジンの出力を制御せずに、単にクラッチ等の伝達機構で車軸への駆動力を調節するものであるので、半クラッチ状態においては、エンジンのエネルギーが無駄に消費される問題がある。
また、対地速度センサを用いてスリップを判断する技術に関しては、車軸等の回転数を計測する回転数センサ以外に当該対地速度センサを設ける必要があり、しかも対地速度センサは高価であるために、作業車両の製造コストが高くなる問題がある。
【解決手段】 制御装置2は、前側左車軸11a等の車軸の回転数センサから各車軸の実回転数を検出し、他方、エンジン回転数センサ6と変速比検出センサ7とから得られる情報で各車軸の推定回転数算出し、実回転数と推定回転数との回転数差が、設定回転数以上である場合にスリップが発生したと判断する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 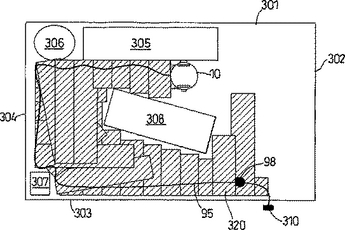 (もっと読む)
(もっと読む)
トラクタおよび被牽引車両の操向操作装置とその制御方法
【課題】オペレータは操向操作に熟練度を必要とせず、また牽引式農業用作業機の車輪を操舵することなく構造が簡単でコストが安く、かつ既存の牽引式農業用作業機にも簡単に装着できる操向操作装置およびその制御方法を提供することを目的とする。
【解決手段】トラクタの前輪8の操舵角と農業用作業機の牽引角度を検出、制御して、トラクタの後車軸中心点Tと農業用作業機の車軸中心点Sの走行軌跡を一致させるようにトラクタの牽引中心点Pを油圧モータによって駆動されるスクリューとボールナットからなる操向操作装置11によって左右方向に移動させる。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
61 - 80 / 85
[ Back to top ]