
Fターム[2B043EA14]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 車両又は作業機の状態 (190) | 走行の状態 (139) | 走行距離 (37)
Fターム[2B043EA14]に分類される特許
1 - 20 / 37
田植機
【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
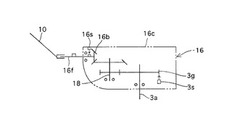
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
苗移植機

【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
農作業車の旋回開始位置設定装置及び旋回開始位置設定方法
【課題】農作業車が枕地において確実に旋回できる旋回開始位置を自動的、且つ確実に設定する。
【解決手段】GPSによる位置情報に基づいて、農作業車100の走行起点とする原点Pを設定する原点設定部1と、原点Pから直線状の基準線L1を設定する規準線設定部3と、原点Pからの移動距離を計測する移動距離計測部4と、農作業車100の実際の走行距離を計測する走行距離計測部5と、計測された移動距離と走行距離との差を算出する距離差算出部6と、農作業車100が旋回していると判定する旋回判定部7と、農作業車100の旋回が判定された位置に旋回判定点P2を設定する旋回判定点設定部8と、規準線L1上の任意の位置に直線基準点P3を設定する直線基準点設定部9と、旋回判定点P2から規準線L1に戻って、規準線L1上の距離差がない最終地点を検出し、この最終地点を旋回開始位置P4として設定する旋回開始位置設定部10とを備えた。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
乗用型苗移植機
【課題】 操向用の左右前輪と左右後輪を設けた走行車両に苗移植作業装置を昇降自在に装着し、左右線引きマーカと該左右線引きマーカの作動を停止させるマーカ作動切替え操作具とを設けた乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて苗移植作業装置が下降する指令を出力する自動旋回制御を行なうと共に、旋回時の左右後輪の回転数を比較し、該回転数の多い左右一方側の線引きマーカを旋回後に線引き作用状態に切り替える制御装置を設けたことを特徴とする乗用型苗移植機とした。
(もっと読む)
乗用型田植機
【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】機体の走行距離を検出する走行距離検出手段と、操向操作自在な前輪の直進位置からの操向角度を検出する操向角度検出手段とを備え、車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置が検出されると作業装置を作業状態に操作するように構成する場合、作業装置の作業状態への操作が適切に行われるようにする。
【解決手段】機体の旋回開始からの機体の走行距離を検出する走行距離検出手段56、又は機体の旋回開始からの経過時間を検出する経過時間検出手段57を備える。走行距離検出手段56の検出値が設定距離に達するまでに、又は経過時間検出手段57の検出値が設定時間に達するまでに、作業装置操作手段55による作業装置の作業状態への操作が終了しなければ、作業装置操作手段55の作動を停止させる停止手段58を備える。
(もっと読む)
乗用型作業機
【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 機体にエンジンからの動力を各別に入り切りする左右サイドクラッチ(SC)を介して駆動される左右後輪を設け、作業装置を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置(S)を設け、該検出装置(S)は、回転検出用の歯車回転体(K)の回転数を検出する構成とした。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
田植機
【課題】 圃場の往復作業走行の折返し部に来た際に、植付部の取扱いを要することなく機体を旋回することができるとともに、一連の動作を継続することが可能となる田植機を提供することにある。
【解決手段】 旋回操作の検出に応じて圃場を旋回走行しうる機体と、この機体に対して昇降可能に支持されてその作業位置まで下降して植付作業をする植付部と、この植付部の上昇、下降、植付稼動、植付停止の各動作を制御する制御部とを備えた田植機において、上記制御部は、畦際まで前進して停車し、植付部を非作業位置に上昇し、後退して旋回するバック旋回時に、機体走行中の旋回操作の検出に応じて作業位置への下降、植付稼動までの一連の動作を制御する旋回連動制御を行う構成とした。
(もっと読む)
1 - 20 / 37
[ Back to top ]