
Fターム[2B043EB05]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの種類 (102) | 方位センサ (34)
Fターム[2B043EB05]に分類される特許
1 - 20 / 34
走行車両
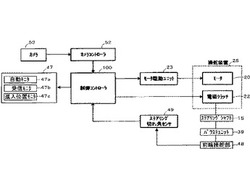
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
苗移植機

【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
薬剤散布用管理作業車両
【課題】単位面積当たり所定量の薬液散布による適正な薬剤散布のために、高精度の散布速度を安定して取得することができる薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、散布車速を連動基準として散布量制御する制御部Cにより単位面積当たり所定量の薬液量で薬剤散布を行う車速連動散布装置Dとを備えて構成され、上記前輪3及び後輪4の駆動動作を検出する駆動センサS1とGPS電波を受けて機体位置を検出するGPSセンサS2とを設け、このGPSセンサS2によって得られた機体の移動速度を散布車速として車速連動散布装置Dを散布量制御するとともに、駆動センサS1によって得られる機体の駆動速度について上記移動速度との差から算出される前輪3及び後輪4のスリップ率を取出し可能に保持する格納部C1を備えたものである。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、耕作機構419を備えた農機300に、情報処理装置100と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、農機300は、農地4について設定されたコースとコースを走行中に耕作機構419が行う農作業とを記憶し、位置標定装置411によって標定される現在位置と記憶しているコースとに基づき、農機300の操舵機構417又は動力機構418を制御してコースに沿って自律走行するとともにその走行中に耕作機構419による農作業を行うようにする。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
作業車両
【課題】作業効率性と作業の均一化に優れた旋回を行う作業車両を提供する。
【解決手段】直進方向を基準として、前記操向ハンドル7の回動角度を検出する角度検知手段51と、作業速度と旋回速度の制御の開始および/または終了の基準となる前記操向ハンドル7の回動角度の閾値Aを設定する角度閾値設定手段61と、前記回動角度の閾値A以上に前記操向ハンドル7が位置する場合の設定旋回車速Vを設定する旋回車速設定手段62と、前記油圧式無段変速装置23の変速アクチュエータ24と、制御手段81とを備え、前記制御手段81は、前記角度検知手段51による検出値が前記回動角度の閾値A以上になると、前記設定旋回車速Vとなるように前記変速アクチュエータ24を作動させ、前記角度検知手段51による検出値が前記回動角度の閾値A未満の場合、前記作業速度になるよう前記変速アクチュエータ24を制御するように構成した。
(もっと読む)
全自動苗移植システム
【課題】本発明では、野菜苗等を自律走行しながら畝に植え付ける苗移植機で、この苗移植機に搭載した移植苗が無くなると自動で苗トレイを補給しながら移植作業を継続できるようにする全自動苗移植システムを提供することが課題である。
【解決手段】走行機体13の前側或は後側に苗トレイTを受け取る苗補給装置18を設けた自律走行の自動苗移植機1と苗トレイTを多数搭載する自律走行の自動苗搬送機40を設けると共に、これら自動苗移植機1と自動苗搬送機40を制御する統合制御装置55を設け、自動苗移植機1に搭載の苗が無くなるか少なくなると自動苗移植機1と自動苗搬送機40を互いに接近させて前記苗補給装置18で自動苗搬送機40から苗トレイTを受け取り、苗の移植走行を続行すべく前記統合制御装置55で制御した全自動苗移植制御システムとした。
(もっと読む)
コンバイン
【課題】デバイダが穀稈の株を割らずに分草し、円滑に穀稈を搬送すると共に乱れなく穀稈を刈取り可能な8条刈りのコンバインを提供する。
【解決手段】8条刈りのコンバイン1は、9本のデバイダを有していると共に、これら9本のデバイダのうち左端から数えて4番目、右端から数えて6番目の機体内側のデバイダを刈取り基準位置としている。上記9本のデバイダは、刈取り基準位置のデバイダが左右の穀稈の中央に位置する際、尺植え及び尺一寸植えのどちらでも穀稈の株を割らないように配設されている。また、この刈取り基準位置のデバイダを支持するデバイダフレーム23aには、方向自動制御用の方向センサ18が取付けられており、この方向センサ18の左右のセンサバー18L,18Rと穀稈とが接触すると、その接触した側のセンサバー18L,18Rとは逆方向に機体の進行方向が修正される。
(もっと読む)
苗植機の苗植制御装置
【課題】 苗植条行程の終端部で走行方向の折返旋回操向を行うときは、操作タイミングが難しく、このタイミングのずれによって苗植付け条間間隔や、植付位置の不揃い等が生じ易い。
【解決手段】 ステアリングハンドルの操向により、車体に対して苗植装置を上昇すると共に、植付クラッチ5を切りにして走行旋回する苗植機において、この折返し走行旋回位置をGPSから入力することことによって、前記苗植装置を下降して植付クラッチ5を入りにする。
(もっと読む)
1 - 20 / 34
[ Back to top ]