
Fターム[2B063CA04]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | 接地部材と作業装置の連動 (40)
Fターム[2B063CA04]に分類される特許
1 - 20 / 40
乗用型水田作業機
【課題】センサーフロートの前部を下方に付勢する付勢機構及び付勢力変更機構、昇降制御手段を備えた場合、付勢力変更機構の操作が行い易くなるように構成する。
【解決手段】作業装置におけるセンサーフロート9の上方の部分に高さセンサー68を備え、センサーフロート9の前部と高さセンサー68とに亘って連係部材55を接続して、作業装置に対するセンサーフロート9の上下位置を高さセンサー68により検出する。高さセンサー68の検出値に基づいて、田面Gから作業装置までの高さが設定高さに維持されるようにする昇降制御手段を備える。作業装置におけるセンサーフロート9の上側で且つ連係部材55の前側の部分に、連係部材55を下方側に付勢する付勢機構57と、付勢機構57の付勢力を変更する付勢力変更機構56とを備える。
(もっと読む)
水田作業機

【課題】既植苗の存在箇所や既播種位置に近い側における整地用ロータの端部で、多量の泥押しや泥波が発生する可能性を低減させる。
【解決手段】左右方向での端部側に位置する端部ロータ部分53Bと、左右方向での中央側に位置する中央部ロータ部分53Aとを備えて構成された整地用ロータ53の端部ロータ部分53Bを、中央部ロータ部分53Aの駆動速度よりも低速での回転が可能な自由回転状態、または田面から離れた非整地状態に切換可能に構成してある。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】植付クラッチとロータクラッチを任意のタイミングで入切できる田植機を提供する。
【解決手段】植付クラッチ19bは、入切作動させる植付側操作アーム64と連動連結され、ロータクラッチ17cは、入切作動させるロータ側操作アーム65と連動連結され、前記植付側操作アーム64と前記ロータ側操作アーム65は、制御カム63に当接され、該制御カム63は、アクチュエータとなるクラッチモータ66により回転駆動され、該制御カム63の回転により前記植付クラッチ19bと前記ロータクラッチ17cをそれぞれ入切可能に構成されるものである。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
苗移植機
【課題】
圃場の凹凸の多少、及び苗の植付姿勢を撮影装置で撮影し、撮影された画像に合わせて苗植装置の昇降、及び植付姿勢の安定化を自動的に図る苗移植機を提供する。
【解決手段】
苗取口4を形成した苗受ガイド5に送る苗タンク6と、苗タンク6の下部に設ける圃場面を滑走するセンタフロート1とサイドフロート2と、苗取口4を下降して苗を植え付ける植付装置7を設けて苗植装置8を構成し、苗植装置8を前輪10及び後輪12を備えた走行車体14の後側に装着した苗移植機において、苗植装置8の上方位置に圃場面の凹凸を表わす画像を撮影する撮影装置17を設け、撮影装置17が撮影した画像で圃場面の凹凸の多少を判別し、圃場面の凹凸が多いときは昇降リンク16を昇降させる昇降シリンダ15の昇降制御感度を低下し、圃場面の凹凸が少ないときは昇降シリンダ15の昇降制御感度を上げる制御構成とする。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
対地作業装置付きの苗移植機
【課題】 本発明の課題は、ロータなどの対地作業装置の作動と非作動の選択を対地作業装置高さ調節レバーの操作から独立して行うことができ、しかもこれら対地作業装置の作動と非作動の選択と対地作業装置高さ調節を簡単な構成で達成できる対地作業装置付きの苗移植機を提供することである。
【解決手段】 苗植付部(4)に対して昇降自在に設けた対地作業装置と、対地作業装置を上昇した非作業位置と下降した作業位置とに昇降するために設けた昇降操作具(84)と、該昇降操作具(84)によって行われた対地作業装置の作業位置での高さを変更調節するために設けた高さ調節操作具(81)とを備え、該高さ調節操作具(81)による対地作業装置の高さ調整を維持したまま昇降操作具(84)を操作できる構成とし、苗植付部(4)の上昇に連動して対地作業装置を非作業位置へ上昇させる構成とした対地作業装置付きの苗移植機とした。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
作業機
【課題】凹凸の多い荒れた圃場面を作らないようにした整地装置と苗植付装置を備えた苗移植機を提供すること。
【解決手段】 整地ロータ27a,27bを支持する平行リンク6と該平行リンク6を昇降させる整地ロータ昇降モータ7と、該昇降モータ7の作動を検知する作動検知手センサ80を苗植付部4に設け、植付部昇降操作レバー78を操作して昇降シリンダ46を作動させると、該昇降シリンダ46の作動に連動して昇降モータ7の作動検知センサ80が昇降シリンダ46を作動を検知すると昇降操作レバー78を操作して苗植付部4が昇降することにより、整地昇降モータ7が連動して動作するため、苗植付部4にある整地ロータ27a,27bの上下動を植付部昇降操作レバー78を操作するだけで行うことができるので、作業者は走行車体2の直進操作や旋回操作に集中することができ、苗の植付精度が向上する。
(もっと読む)
水田作業機
【課題】使用者が機体操縦部から機体後方下方側を覗き込む等の煩わしさの無い状態で整地装置の状態を確認することができ、操作性の向上を図ることが可能な水田作業機を提供する。
【解決手段】機体と水田作業装置との間に横方向に沿う軸芯周りで回転駆動される整地ロータ50を備えた整地装置が備えられ、この整地装置が、整地作業を行う作業状態と作業を行わない非作業状態とに切り換え自在に構成され、整地ロータ50の整地深さを表示する表示装置Fと、整地装置が作業状態であれば表示装置Fを整地ロータ50の整地深さを表示する表示状態に切り換え、整地装置が非作業状態であれば表示装置Fを整地ロータ50の整地深さを表示しない非表示状態に切り換える制御装置Hとが備えられている。
(もっと読む)
乗用田植機
【課題】 本発明の課題は、圃場に適した整地作業をできるようにすることである。
【解決手段】 走行車体の後側に昇降用リンク装置を介して苗植付装置を連結し、苗植付装置から前方に突出するアームを介して左右方向の均平ロータリ軸回りに回転して対地作業を行う均平ロータリを走行車体の後方に設けた乗用田植機において、苗植付装置に設けたセンターフロートの上下動を検出する上下動検出機構を設け、均平ロータリを上下調節する均平装置上下調節モータを設け、上下動検出機構の検出に基づいて均平装置上下調節モータの作動目標値を補正すると共に、均平装置上下調節モータへ出力して均平ロータリを昇降制御する制御部を設けた。
(もっと読む)
苗移植機
【課題】 本発明の課題は、接地検出センサとして、地表面に接触することにより発生する歪、衝撃が検出できる圧電セラミックス素子を用いることによって、低コストで地表面の変化を的確に検出でき、シンプルな制御が可能な制御手段を具現することにある。
【解決手段】 本発明は、苗植付部(2)の前側に地表面を整地する整地ロータ(4)を備えてある苗移植機において、圃場の地表面に対する接触により発生する歪、衝撃が検出できる圧電セラミックスプレートからなる接触検出センサ(3)を苗植付部(2)の適所に配置して設け、該接地検出センサ(3)は、この接地面が地表面に沿うように対設すると共に、地表面の変化検出結果に基づき苗植付部の植付姿勢を自動制御する。
(もっと読む)
乗用田植機
【課題】本発明の課題は、車速の変化に応じて整地ロータ、特に中央のセンタロータを昇降制御することによって、ロータの地中への潜り込みを防止し、整地作業が的確に行えるようにする。
【解決手段】この発明は、苗植付部(4)の前側に植付直前の圃場面を均平化する前位のセンタロータ(27b)と後位のサイドロータ(27a)からなる整地ロータ(27)を設置し、該整地ロータ(27)は、車速の変化に応じて上下動可能に構成すると共に、車速の所定以上の増速に伴い前位のセンタロータが上昇変位すべく関連構成する。
(もっと読む)
作業機
【課題】圃場均平化作業を効果的に行えるようにロータの回転速度を変更できる整地装置を備えた作業機を提供すること。
【解決手段】走行車体2に下降した作業状態と上昇した非作業状態に昇降可能な作業部4を設け、苗植付部4の上昇に連動して走行車体2の走行速度に対する圃場均平化用ロータ27の回転速度を低速側と高速側に変更するロータ変速装置Bを低速側に変速する駆動入り切りする駆動入切用操作ケーブル100,昇降リンクアーム108、上リンク40,下リンク41などを設けた作業機であり、苗植付部4を上昇させたときには、ロータ27が停止するので、ロータ27が高速又は低速ポジションに設定したままで誤作動されることが防止できる。
(もっと読む)
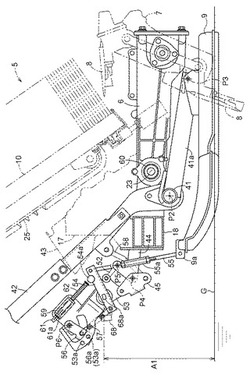
乗用型田植機
【課題】低コストで植付け深さに連動して整地装置の高さ位置を調節する乗用型田植機を提供することを目的とする
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、支持ステー30,30間には連動軸57が回動自在に支持されている。連動軸57には整地ロータ昇降用アクチュエータ54及びフロート遥動角検出ポテンショメータ55が取付けられたモータ・ポテンショベース59が遊嵌されていると共に、整地ロータ昇降用アクチュエータ54の出力ギヤと噛合するセクタギヤ67が固設されている。連繋リンク73が植付け深さが変更されたことに応じてモータ・ポテンショベース59を回動させると、出力ギヤ及びセクタギヤ67の噛合によって連動軸57が回動し、該連動軸57に取付けられた第2連結アーム65及びステー62を介して整地ロータ17が昇降する。
(もっと読む)
移植機
【課題】植付深さを調整する調整レバー及び載せ台からの苗の掻き取り量を変更する変更レバーを設け、植付け深さ調整に整地作業機の昇降高さ調整を連動させる移植機において、左右バランスが良好な移植機を提供する。
【解決手段】走行機体の後方に配置された苗載せ台と、苗載せ台の下方に配置されて苗を掻き取って圃場に植付ける植付部と、植付部の前方に配置されて圃場を整地する整地作業機6と、昇降作動機構33と、植付深さを調整する調整レバー31と、対地高さの変更に整地作業機6の昇降高さを連動させる連動機構34と、苗載せ台と植付部との距離を変更して苗の掻き取り量を変更する変更レバー27とを備え、植付作業機4の少なくとも一部を構成し、植付作業機の左右の一方側に、昇降作動機構33及び連動機構34を配置するとともに、他方側に調整レバー31及び変更レバー27を配置した。
(もっと読む)
水田作業機
【課題】水田作業装置と機体との間に整地装置を備えた水田作業機において、水田作業装置を昇降自在及び整地装置の高さを上下に変更自在に構成した場合、整地装置と水田作業装置や機体との干渉を回避する。
【解決手段】機体の後部にリンク機構3を介して水田作業装置5を昇降自在に支持し、水田作業装置5と機体との間に整地装置53を昇降自在に支持する。水田作業装置5又は機体に対する整地装置53の高さを上下に変更自在な変更手段56を備える。機体に対する水田作業装置5の高さに応じて、変更手段56による整地装置53の高さ変更に制限を加える制限手段を備える。
(もっと読む)
1 - 20 / 40
[ Back to top ]