
Fターム[2B076EA03]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の自動制御 (620) | 複数の検出対象→1つの制御対象 (96)
Fターム[2B076EA03]に分類される特許
21 - 40 / 96
防塵カバーの除塵装置
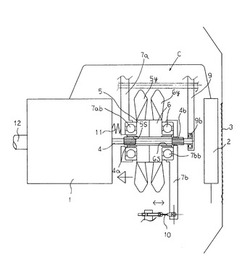
【課題】エンジン側へ除塵カバーを通して冷却風を吸引する吸引ファンを逆回転して除塵カバーへ吹き出し風を送って除塵するようにしたエンジンの防塵カバー除塵装置において、タイミングをはかって自動的に吹き出し風を発生するようにすることで除塵カバーの除塵を行えるものとする。
【解決手段】エンジン(1)の負荷が軽減したことを検出する負荷軽減検出手段(A)或いはエンジン(1)の過負荷を検出するエンジン過負荷検出手段(B)を設け、負荷軽減検出手段(A)が軽負荷を検出するかエンジン過負荷検出手段(B)が過負荷を検出した場合に、エンジン(1)の防塵カバー(3)の内側から外側へ向けて送風するように逆転ファン体(5)を回転駆動する吸引ファン逆転機構(C)を設ける。
(もっと読む)
コンバインの変速制御装置

【課題】コンバインの低速走行時における走行速度と刈取搬送部の回転変速を適正化する。
【解決手段】主変速レバーポジションセンサ(SE1)の検出値に応じて走行無段変速装置(15)及び刈取無段変速装置(19)を変速設定し、所定時間後に刈取変速モータ位置検出センサ(SE2)の検出値が設定値より高いときには、走行停止状態で刈取無段変速装置(19)を所定回転数で回転させる走行停止時刈取調整運転モードに移行し、刈取増速スイッチ(SW4)と刈取減速スイッチ(SW5)の操作により刈取無段変速装置(19)の回転数を増減設定するコントローラ(35)を備える。
(もっと読む)
コンバインの変速制御装置
【課題】
コンバインの発進時における刈取搬送部の駆動変速を適正化し、刈取作業を円滑に行なえるものとする。
【解決手段】
刈取自動変速入切スイッチ(SW1)を入りにすると、主変速レバーポジションセンサ(SE1)の検出値に応じて走行無段変速装置(15)及び刈取無段変速装置(19)の変速設定をし、所定時間後に刈取変速モータ位置検出センサSE2の検出値が設定値より低いときには、刈取無段変速装置(19)の刈取駆動速度に応じて走行無段変速装置(15)を減速変速する。また、検出値が設定値より高いときには、刈取無段変速装置(19)の駆動速度に応じた走行無段変速装置(15)の変速を停止するコントローラ(35)を設ける。
(もっと読む)
コンバインの刈取装置
【課題】刈取作業中に走行を停止した場合の再発進の際に、刈取部の起動の遅れを招くことなく、車速対応の刈取り動作を確保することができるコンバインの刈取装置を提供する。
【解決手段】コンバインの刈取装置は、刈取部(3)、その無段変速部(23b)、その制御軸を調節する制御部(32)、刈脱レバー(33)、車速センサ(34)等から構成され、上記制御部(32)は、刈脱レバー(33)のオン操作によって無段変速部(23b)がエンジン動力を受ける場合に、同無段変速部(23b)の変速出力が実質的に停止される制御軸の中立幅の中央となる中立角度位置からの角度範囲について、車速センサ(34)による走行車速に応じた角度位置に制御軸を駆動するとともに、車速センサ(34)の信号による走行停止の検出により、中立角度位置の近傍に設定した所定の停止角度位置に制御軸を駆動制御するものである。
(もっと読む)
コンバイン
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン
【課題】車速が高速になるほど刈取部の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部の駆動を停止する車速連動制御を行うコンバインにおいて、穀稈の押倒しを効率的に防止可能なコンバインを提供することを課題とする。
【解決手段】本発明は、走行機体3に連結された刈取部4と、刈取部4への動力を変速する変速装置46と、変速装置46を介して車速検出手段により検出された車速に刈取部4の駆動速度を連動させて、車速が高速になるほど刈取部4の駆動速度を高速にする一方で、走行停止が検出された場合には刈取部4の駆動を停止する車速連動制御を行う制御部58とを備え、傾斜角検知手段61により走行機体3の所定角以上の前傾斜が検出された場合には、車速検出手段により走行停止が検出された際にも、刈取部4が駆動するように制御部58を構成する。
(もっと読む)
コンバイン
【課題】
刈取作業中の穀稈引起しラグの運動エネルギーを回生して発電し、補助エネルギーとして利用することで、コンバインの燃費低減を図る。
【解決手段】
走行装置(2)と作業部にエンジン(E)動力を伝達すると共に、作業部を電動モータ(17)で駆動するようにし、エンジン(E)により発電機モータ(24)を駆動して発電して蓄電池(14b)に蓄電し、エンジン(E)の過負荷時に電動モータ(17)を駆動するコントローラ(23)を設け、刈取搬送部(7)に設けた多数の引起しラグ(26c)が、ゴム製の収納ガイド(27)に衝突して引起しケース(26a)内に収納される際に、収納ガイド(27)を介して衝撃発電素子(28)を振動させて発電し、蓄電池(14b)に蓄電する。
(もっと読む)
コンバインの刈取回転数制御装置
【課題】コンバインの刈取回転数制御装置において、低速走行状態の刈取開始時の回転数設定を迅速に設定する。
【解決手段】刈取無段変速装置(19)のトラニオン軸調節モータを徐々に増速しながら刈取回転数が0rpmから上昇して初めて所定回転数を検出したトラニオン軸調節モータの調節位置をトラニオン軸位置検出センサ(SE1)で初期所定回転数として検出記憶し、自動制御運転において超低速走行での刈取搬送部(8)の回転数を初期所定回転数として設定し、刈取搬送部(8)の回転数が初期所定回転数より高いときには車速と関連した刈取回転数に制御する。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバインの刈高さ制御装置
【課題】コンバインの刈高さ制御装置において、穀稈の刈高さの変動を少なくし、刈取搬送部の地面への突込みを防止する。
【解決手段】接地センサSE1と刈高さポジションセンサSE2とで刈取搬送部の刈高さを設定機体高さに昇降制御する刈取搬送部昇降制御手段を備え、接地センサSE1が刈取搬送部の地面への接地を検出すると、接地センサSE1が接地検出をしなくなるまで刈取搬送部を所定高さに上昇させる。次いで、上昇後所定時間あるいは所定距離走行した後に、刈取搬送部を設定対機体高さまで低速で下降させるコントローラ20を備える。
(もっと読む)
2条刈コンバイン
【課題】設定刈取条数よりも多い条数の刈取りを行うことが可能な2条刈コンバインにおいて、3条以上の穀稈の同時刈取作業を行っている際には、オペレータにその旨を自動的に報知することができる2条刈コンバインを提供することを課題としている。
【解決手段】本発明は、デバイダ11で分草された圃場の穀稈を引起こす左右一対の引起し装置9L,9Rを備え、左右両端のデバイダ11L、11Rの間に3条以上の穀稈を同時刈取可能な間隔が形成されるように該デバイダ11を配置した2条刈コンバインにおいて、前記左右両端のデバイダ間に3条以上の穀稈が分草されたことを検出する検出手段を設け、該検出手段によって3条以上の穀稈が左右両端のデバイダ間に分草されてきた状態である多条刈状態が検出された場合には、報知手段を介してオペレータへの報知を可能とした。
(もっと読む)
コンバイン
【課題】低速走行での刈取作業における制御精度のばらつき低減、高速走行での刈取作業におけるハンチング・追従遅れの低減。
【解決手段】走行用静油圧式無段変速装置12と走行速度に同調して刈取装置4を変速駆動する刈取搬送用静油圧式無段変速装置21を設ける。刈取搬送用静油圧式無段変速装置21の回転制御は、車速が所定走行速度より低速のときには、低速モードとして刈取装置4を走行速度に同調させて変速し、車速が所定走行速度より高速のときには、高速モードとして刈取装置4を走行速度に同調させて変速するように制御出力するコントローラ60を設けたことを特徴とするコンバイン。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機と、直進用変速機に対する直進操作具と、旋回用変速機の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を内蔵したステアリングボックス120を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機を作動させるように構成する。ステアリングボックス120は、走行機体に設けられた操縦部9のうち走行機体1の左右中央側に位置するサイドコラム12内に配置する。
(もっと読む)
コンバイン
【課題】排出される穀粒量と、穀粒タンクに貯留する穀粒量に対する塵量の比率とを求め、求めた塵量の割合及び排出される穀粒量に基づいて、塵の発生を防止する制御を行うか又は排出される穀粒量を低減させる制御を行う。
【解決手段】塵センサ50にて脱穀装置2内に発生した塵量を検出し、投口センサ23bにて投口23aから穀粒タンク4へ送出される穀粒量(投口量)を検出して、検出された塵量と投口量との比率を求める。また排出量センサ34にて排塵口33及び排気通路37から排出される穀粒量(ロス量)を検出する。前記比率と前記ロス量とに基づいて、塵の発生を防止する制御を行うか又はロス量を低減させる制御を行う構成とした。
(もっと読む)
コンバイン
【課題】フィードチェンから排藁搬送機構に受け継ぐ際や、排藁搬送機構にて搬送する途次において、排藁の搬送姿勢が乱れたり、排藁が詰ったりするといった問題を解消する。
【解決手段】エンジン14からの動力にて駆動する走行部2を有する走行機体と、刈刃及び穀稈搬送機構を有する刈取装置3と、フィードチェン6を有する脱穀装置5と、脱穀装置5にて脱穀された後の排藁を搬送する排藁搬送機構234とを備える。排藁搬送機構234を駆動させる排藁搬送駆動用電動モータ94と、穀稈搬送機構の搬送速度を検出する搬送速度センサとを更に備える。搬送速度センサの検出情報に基づいて排藁搬送駆動用電動モータ94の回転駆動速度を変更調節するように構成する。
(もっと読む)
作業車両
【課題】走行中に走行速度を必要に応じて簡易な操作により微調節することが可能な作業車両を提供する。
【解決手段】HST82と、変速用アクチュエータ82aと、主変速レバー94と、主変速操作量検出手段94aと、調速用アクチュエータ71bと、アクセルレバー93と、アクセル操作量検出手段93aと、フットペダル95と、フットペダル操作量検出手段95aと、走行速度検出手段101と、主変速レバー94の操作量に基づいて走行速度Vを調節するとともに、アクセルレバー93の操作量に基づいて走行速度Vを調節する一方、フットペダル操作量検出手段95aによりフットペダル95が操作されたことを検出した場合、フットペダル95の操作量に基づいて補正率Rを算出し、変速用アクチュエータ82aを動作させることで補正率Rだけ走行速度Vを変化させる制御手段100と、を具備した。
(もっと読む)
作業車両
【課題】作業車両の状態に応じて、エンジンの出力回転を容易に調節することができる作業車両を提供する。
【解決手段】HST82と、主変速レバー94と、主変速操作量検出手段94aと、調速用アクチュエータ71bと、エンジン回転数検出手段71cと、刈取クラッチ26及び脱穀クラッチ34と、刈取検出手段96a及び脱穀検出手段97aと、刈取クラッチ26等が入り状態にあることを検出した場合、エンジン71の出力回転を作業用回転数Nwに調節し、刈取クラッチ26等が切り状態にあること、及び主変速レバー94が中立位置にないことを検出した場合、エンジン71の出力回転を路上走行用回転数Nmに調節し、刈取クラッチ26等が切り状態にあること、及び主変速レバー94が中立位置にあることを検出した場合、エンジン71の出力回転をアイドリング回転数Niに調節する制御手段100と、を具備した。
(もっと読む)
コンバイン
【課題】制御性およびメンテナンス性を向上させるとともに目標走行速度にかかわらず違和感や不快感が発生しない運転操作が可能なコンバインの提供を目的とする。
【解決手段】制御手段200は、変速操作具25の操作量を検知する操作量検知手段25aと、走行用油圧式無段変速装置40の走行回転数を検知する走行回転数検知手段108と、が接続され、変速操作具25の操作量から算出される目標走行速度Vtと走行用油圧式無段変速装置40の走行回転数から算出される走行速度Vrとの速度偏差Vsを減少させるために、当該速度偏差Vsと走行制御ゲインG1とから算出される走行斜板角度補正値Vθmを目標走行速度Vtに加算して算出される速度指令値Vによって走行用油圧式無段変速装置40を制御する構成であって、走行制御ゲインG1は、目標走行速度Vtが第一設定速度V1以下では0とすることを特徴とするものである。
(もっと読む)
コンバイン
【課題】非作業時に無駄な燃料を消費しないコンバインを提供する。
【解決手段】コンバインは、エンジンを搭載した走行機体と、刈取部と、脱穀装置と、クラッチセンサと、エンジンコントローラと、ブレーキペダル駆動モータと、を備える。エンジンはアイドリング回転状態と定格回転状態とで切替可能である。クラッチセンサは、作業クラッチの状態を検知する。ブレーキペダル駆動モータは、強制的に駐車ブレーキを掛けることが可能である。そして、エンジンコントローラは、作業クラッチの切断を検知した状態で(S103)、エンジンのアイドリング回転状態が一定時間以上継続した場合は(S104)、駐車ブレーキを作動させた上で(S105)、エンジンを自動的に停止させる(S106)。
(もっと読む)
刈取収穫機
【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、移動走行を行なう作業形態を採用して作業を行うに当たり、能率よくかつ操作簡単に行なうことができるようにする。
【解決手段】刈取部と走行変速装置7とを連係させた連係手段71を備えてある。連係手段71は、刈取部を下降作業高さに下げる操作によって走行変速装置7を設定高速位置から減速操作する。
(もっと読む)
21 - 40 / 96
[ Back to top ]