
Fターム[2B304QA14]の内容
Fターム[2B304QA14]に分類される特許
1 - 20 / 24
水平制御装置
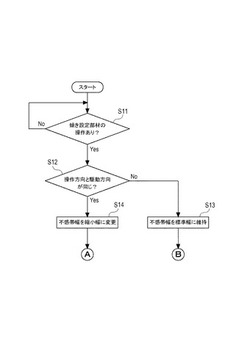
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
草刈作業機

【課題】草刈作業部がトラクタ後方の収納位置の時、トラクタの運転席から容易な操作により草刈作業部が回動しないように構成された草刈作業機を提供する。
【解決手段】草刈作業機において、草刈作業部5がトラクタ1の後方に位置した時に、草刈作業部5の上下方向への回動を阻止するための規制手段が設けられていて、規制手段は、草刈作業部5をトラクタ1後方の被オフセット状態で略水平状態にすることにより作動する草刈作業機による。また、規制手段は、草刈作業部5を水平移動させる回動アーム60に設けたストッパ600により草刈作業部5の上下方向の回動を阻止する規制手段である草刈作業機による。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
セミクローラ型作業車両
【課題】セミクローラ型作業車両において、左右クローラ走行装置を持ち上げ支持し、泥の落下を防止しながら路上走行をすることを課題とする。
【解決手段】作業車両の機体前側部には左右前輪を、機体後部には左右クローラ走行装置を設けたセミクローラ型作業車両において、機体後部に作業機昇降用のリフトアーム及び作業機連結用の三点リンク機構を設け、該三点リンク機構の左右ロワーリンクに、前後方向に長い左右持ち上げ棒を取り付け、左右ロワーリンクの前端部よりも前方へ突出する左右持ち上げ棒の前側部位に左右接地輪体を設け、左右リフトアームにより左右ロワーリンクを上方へ回動させると、左右持ち上げ棒の左右接地輪体により左右クローラ走行装置を地面から浮上させて支持することを特徴とするセミクローラ型作業車両とする。
(もっと読む)
薬液散布作業車両
【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
薬剤散布車の散布制御装置
【課題】左右のブームをそれぞれ昇降可能に備えて薬剤散布する際の機体旋回後の散布再開に伴う作業者の負荷軽減を可能とする薬剤散布車の散布制御装置を提供する。
【解決手段】薬剤散布車の散布制御装置は、直線散布走行から旋回走行により隣接域に移行して逆方向の直線散布走行を開始する薬剤散布車に薬剤散布用の左右のブーム(9b,9b)を昇降可能に備え、これら左右のブーム(9b,9b)を低位散布のための作業位置と高位待避のための非作業位置にそれぞれ切替え可能に構成され、直線散布走行中に所定の旋回判定舵角以上となる1回目の舵角検出によってその旋回外側のブーム(9b)を非作業位置に切替え制御し、これに続く同側の旋回判定舵角以上となる2回目の舵角検出によって旋回終了と判定し、この旋回終了の判定によって上記ブーム(9b)を作業位置に切替える制御処理を設けたものである。
(もっと読む)
トラクタの作業機上限規制装置
【課題】作業機をトラクタの後部にリンク機構を介して昇降自在に装着したものにおいて、作業機の上昇上限位置をトラクタ近接位置に容易に設定することができるトラクタの作業機上限規制装置を提供する。
【解決手段】作業機8をトラクタ1の後部に昇降自在に装着するリンク機構9を備え、このリンク機構9を駆動して作業機8を上昇させる昇降シリンダ22を備え、作業機8が上昇してトラクタ1に近接した位置であるトラクタ近接位置に達したことを検出する上限検出センサ47を設け、この上限検出センサ47の検出信号によって昇降シリンダ22の作業機上昇動作を停止させるように構成する。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
作業車両
【課題】オペレータが作業中に昇降制御や姿勢制御が確実に行われていることを確認できるようにすると共に、昇降制御や姿勢制御における感度調節のための参考情報を容易に得られるようにする。
【解決手段】昇降制御、或いは姿勢制御を行うアクチュエータ24,32に対して伸張指令が出されているか、縮小指令が出されているか、又は制御不能な状態にあるか否か等を、座席に座ったオペレータが目視可能なセンターピラー9bに設ける表示ユニット57を介してオペレータに表示する。
(もっと読む)
走行作業機の油圧ローリング制御装置
【課題】本発明では、ローリング油圧シリンダが作動しない状態が長く続いてもオイル漏れなどの支障が生じないようにすることを課題とする。
【解決手段】走行車体に作業機をローリング可能に装着し、ローリング油圧シリンダで作業機をローリング制御する走行作業機の油圧ローリング制御装置において、ローリング油圧シリンダへの圧油供給時間をカウントする油圧作動タイマとローリング油圧シリンダの作動を検出するローリングセンサを設け、該ローリングセンサが所定時間を超えてローリング油圧シリンダが作動しないことを検出するか制御装置からローリング信号が出力されない場合には、ローリング油圧シリンダに僅かのローリング指令を出力すべくして走行作業機の油圧ローリング制御装置を構成した。
(もっと読む)
水田作業機
【課題】植播系作業装置の昇降に関連して作動するように構成された昇降関連作業装置の作動を、不要な誤操作などを生じる虞少なく行えるようにする。
【解決手段】植播系作業装置の昇降作動方向、及び植播系作業装置が所定高さ位置H2の上側または下側の何れの側に位置するかの判別結果に基づいて、昇降関連作業装置の作動状態を、昇降作動行程中における所定高さ位置H2の上側と下側とで互いに作動状態が異なり、かつ所定高さ位置H2の下側における作動状態が、昇降作動行程の上昇行程でも下降行程でも同じ作動状態に維持されるように構成し、所定高さ位置H2を変更可能にした。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
苗移植機
【課題】畦越えなどしようとして、苗植付装置を上昇させるときにエンストを起こさないようにすることができる苗移植機を提供すること。
【解決手段】車体の後側に昇降リンク装置2を介して昇降可能に装着された苗植付装置3を接地する作業位置まで下降させる操作と対地浮上する所定の非作業位置まで上昇させる操作が行える昇降操作装置110bと苗植付装置を任意の高さに上昇させることができる任意上昇操作装置110cを設け、任意上昇操作装置110cを操作すると、その上昇操作量に応じてエンストさせないようにエンジン12のアイドリング回転数を上昇させ、昇降操作装置110bを操作するとエンジンのアイドリング回転数を上昇させる作動状態であると、それを解除してアイドリング回転から元の通常回転に戻るようにしたので、畦越えしながらの植付時、エンジン12のアイドリング回転数が上昇するので、走行負荷に対処でき、エンストを防止できる。
(もっと読む)
作業車のリフトアーム昇降構造
【課題】作業車のリフトアーム昇降構造において、エンジンの始動操作を行った後に、作業者の誤解を招かないように構成する。
【解決手段】昇降操作具23の操作に伴って昇降操作具23の操作位置に対応する位置とリフトアーム7の位置との差により、制御弁11が上昇及び下降位置に操作され、昇降操作具23の操作位置に対応する位置とリフトアーム7の位置とが合致すると、制御弁11が中立位置に操作される。昇降操作具23の操作位置に対応する位置を検出する第1位置センサー38と、リフトアーム7の位置を検出する第2位置センサー44とを備える。キースイッチ43のOFF位置からON位置への操作時において、第1及び第2位置センサー38,44の検出値が合致しないと、昇降操作具23の操作位置に対応する位置を変更して、第1及び第2位置センサー38,44の検出値を合致させる。
(もっと読む)
作業車
【課題】複数の制御手段を備えた作業車において、各種の作業に対応するように制御手段を選択する場合、制御手段の選択が容易に行えるように構成する。
【解決手段】複数の制御手段と、制御手段の状態を人為的に変更可能な設定操作具とを備える。複数の制御モードM1,M2を備え、制御モードM1,M2の各々において制御手段の状態を記憶可能に構成し、制御モードM1,M2に記憶された状態を設定操作具により変更可能に構成する。複数の制御モードM1,M2のうちの一つを人為的に選択する選択手段67を備え、選択手段67により選択された制御モードM1,M2の状態に基づいて制御手段が作動するように構成する。
(もっと読む)
作業機
【課題】後進時において機体の地面への接触を防止しつつ、姿勢の水平制御が可能な作業機を提供する。
【解決手段】コンバイン(作業機)は、機体の左右両側に配置されるクローラ走行部と、クローラ走行部の接地面に対する機体の支持高さを昇降させるために当該機体の左右に配置される機体昇降シリンダと、を備える。また、コンバインは、機体の左右傾斜角を検出する傾斜角センサと、機体の前後進操作が可能な主変速レバーと、傾斜角センサの検出値に応じて機体昇降シリンダを制御することで機体を水平制御することが可能な制御部と、を備える。制御部は、操作部の後進操作が検出され(S103)、更に後進速度が所定速度以上であると(S104)、一側の前記機体昇降シリンダを伸長させて機体が最上端になる位置で維持するとともに、他側の前記機体昇降シリンダを伸縮させることで機体を水平に制御する(S106〜S109)。
(もっと読む)
移植機
【課題】感知体の土圧感知に基づいて植付作業機の対地高さを制御するものにおいて、構成がシンプルで且つハンチングの発生を効率的に抑制できる移植機を提供することを課題とする。
【解決手段】走行機体3と、走行機体3に昇降自在に連結された植付作業機7と、植付作業機7を昇降駆動させる油圧式の昇降シリンダー9と、前記昇降シリンダー9を伸縮作動させる昇降バルブ18と、植付作業機7に設けられ圃場面からの土圧を感知する感知体12と、感知体12の土圧感知に昇降バルブ18の開閉を連動させる連係手段32とを備えた移植機において、非接地高さにある植付作業機7を下降作動させ、植付作業機7が圃場に接地すると、それ以降、感知体12の土圧感知に基づく対地高さ制御中に昇降バルブ18の植付作業機7下降側の開度が全開にならないように規制する規制手段33を設け、植付作業機7の下降スピードを制限する。
(もっと読む)
作業車
【課題】 昇降自在なリンク機構を機体の後部に備えて後方に延出して、リンク機構に作業装置を連結し、リンク機構を昇降駆動するアクチュエータ及び昇降制御手段を備え、前輪及び後輪サスペンションバネを備えた場合、作業装置の姿勢の安定化を図る。
【解決手段】 作業装置5が作業地G1から設定高さに維持されるように、アクチュエータを作動させる昇降制御手段を備える。前輪1を機体に前輪サスペンションバネ40を介して支持し、後輪2を機体に後輪サスペンションバネ32を介して支持する。後輪サスペンションバネ32のバネ定数K2を、前輪サスペンションバネ40のバネ定数K1よりも大きなものに設定する。
(もっと読む)
コンバイン
【課題】走行機体に対して左右の走行装置をそれぞれ独立して昇降させる左右一対の走行部昇降装置を備え、前記走行機体の左右方向の傾斜調整を行い得るコンバインにおいて、排出オーガによる排出作業時に排出不良を防止し、安定した排出作業を行うことができるコンバインを提供する。
【解決手段】自動制御モード実行時且つオーガ検出センサ492からの信号に基づき排出オーガ7が格納位置から外れたと判断された場合、制御装置400により、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近する(最下限位置となる)まで左右一対の走行部昇降装置がともに近接方向に作動する(車高を下げる)。そして、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近した状態で、傾斜検出センサ450により検出される傾斜角度に応じて、制御装置400が走行機体2を水平角に自動制御する下限水平制御が行われる。
(もっと読む)
1 - 20 / 24
[ Back to top ]