
Fターム[2C150DA04]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857) | 歩行するもの (190) | 二本足によるもの (129)
Fターム[2C150DA04]に分類される特許
1 - 20 / 129
ロボット歩行装置
【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
(もっと読む)
二足歩行ロボット

【課題】簡単な構成で人間に近いスムーズな歩行、また外部からの衝撃にも倒れづらい二足歩行ロボットを実現する。
【解決手段】永久磁石4、4A、4B、4Cと鉄板9、9A、9B、9Cをそれぞれ吸着させる。永久磁石4、4Aを取り付けた板5をモーター3によって90度回転させ、永久磁石4は鉄板9からアルミ板8A、永久磁石4Aは鉄板9Aからアルミ板8Aの上にそれぞれスライドさせ、永久磁石4と鉄板9、永久磁石4Aと鉄板9Aによる吸着をとく。その状態からモーター3B、3Cを右足1の底面が床面10と平行に持ち上がるようそれぞれ30度回転させると重心移動を要さずに右足2を持ち上げる事が出来る。右足1を持ち上げた後、モーター3B、3Eを足1が床面10と平行に接するようにそれぞれ30度回転させると前進することができる。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
脚式移動ロボット
【課題】駆動制御性の良好な膝関節角を増加させることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上腿リンク32と下腿リンク34を連結する膝関節16とを有する脚体2を備える。膝関節16は、一端が下腿リンク34の軸40に対して回転自在に連結され、他端が上腿リンク32の軸42に回転自在に連結される連結ロッド44と、下腿リンク34の軸60と上腿リンク32の軸56との間の距離を、電動モータ40による駆動力により変化させる距離変動機構50とを備える。膝関節16の屈曲角が0度のとき、軸40と軸42との間の距離と軸60と軸56との間の距離との和が、軸40と軸56との間の距離よりも小さい。
(もっと読む)
脚式移動ロボット
【課題】足首部のコンパクト化が可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、下腿リンク34に設けられ、ピッチの方向に揺動可能な揺動部材52と、下端54aが揺動部材52の前端52bに連結された前側ロッド54と、上端56aが揺動部材52の後端52cに連結され、下端56bが足首関節の揺動軸線より後方にて足平22に連結された後側ロッド56と、前側ロッド54を駆動するアクチュエータ58と備える足首関節駆動機構50を有する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
ロボット、ロボット制御方法およびプログラム
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
重心移動装置を有する2足歩行ロボット及び重心移動方法
【課題】2足歩行ロボットにおいて、ヒトの2足歩行運動の様に、より自然な歩行姿勢を実現するための構造と重心移動方法を提供する。
【解決手段】腰部4と両脚から成る下肢と、腰部を軸に傾斜可能な腹部3と、頭部6及び可動可能な両腕が接続され、腹部を軸に回転可能な構造の胸部から成る上体から構成され、胸部筐体内に独立して上下左右に可動可能なバランサー42と称する駆動用バッテリー及びスタビライザー43と称する重心移動用補助錘を搭載し、各可動部はアクチュエーター8により可動であり、頭部に擁する3軸加速度センサー22により腰部を絶対水平に保ち、前後の重心移動は上体の前傾動作もしくは後傾動作、もしくはスタビライザーの胸部2筐体内での位置移動もしくは両脚の足関節部動作により行い、また左右の重心移動は腹部を軸とする胸部の回転動作と、バランサーとスタビライザーの複合動作により行う2足歩行ロボット。
(もっと読む)
二脚式歩行装置
【課題】大きな歩幅と安定性とを両立させる。
【解決手段】少なくとも3点の接地点を有する右足裏1および左足裏3と、右足裏1から上方側に向かって延びるとともに右足裏1に対して回転接続される右脚2と、左足裏3から上方側に向かって延びるとともに左足裏3に対して回転接続される左脚4と、右脚2のうち右足裏1の反対側部位とを備え、右足裏1は、ジグザグ平面ローラー11の二等辺三角形のうち1つの二等辺三角形の底辺側部位上に位置し、左足裏3は、ジグザグ平面ローラー11の二等辺三角形のうち右足裏1に隣り合う二等辺三角形の底辺側部位上に位置し、ジグザグ平面ローラー11が転がる際に二等辺三角形が順番に接地して進行するように、右足裏1および左足裏3が順番に接地し歩行を実行する。
(もっと読む)
歩行玩具
【課題】脚部に磁着体を持つ人形を、台座上で台座下の磁力により移動させる玩具において、人形に複雑な機構を要することなく、人間の歩行に似た動作を付加する方法を提供すること
【解決手段】台座1内部の上面の下の外側軌道板2、内側軌道板3からなる通路に磁石保持部材7を摺動可能に、かつ、外側軌道板2の下の、回転レバー6の従回転軸26に回動可能に軸支して載置し、回転レバー6を回転させた時に、磁石保持部材7の一部が左脚支点用突起4及び右脚支点用突起5により交互に回動し、台座1上面に載置された人形10の両脚の脚裏付近に設けた磁着体9が、磁石保持部材7に固着した磁石8との吸着力により左右交互に回動前進するようにして、人形に歩行に似た動作をしながら移動する動きを与えた。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
電気機器漏電磁力利用した磁石玩具
【課題】 玩具に意外性を持たせて、扱う人に好奇心を起こさせるために、外部からの力無しで運動しているように見える仕掛けをするのが一つの方法である。本発明は課題を解決する方法として、家庭用交流電源を使用する電気機器の変圧部から外部に漏洩する磁力を利用して、ユーモラスな動きを行う電気機器漏電磁力利用した磁石玩具を提供する。
【解決手段】 玩具本体の底部に、磁極を結ぶ方向が、電器機器変圧部の面と平行になるように磁石を固定し、玩具本体の底部に、電気機器変圧部から受けた磁力を回転、走行運動に効率よく変換するための3個以上の接地点を持つ運動変換足、又は連続して連なった運動変換足を貼付することを特徴とする電気機器漏電磁力利用した磁石玩具。
(もっと読む)
重力利用2足歩行機構
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】並行リンク機構の可動角を制限した脚機構に、外側が浮くように足を取付けた機構を、両側対象に配置し、腰板で結合した2脚機構の上に、左右の重心を変化させられる機構を設けた胴体を搭載した機構において、前進する方向に胴体が位置するよう並行リンク機構を曲げ、この状態にて左右方向の重心を変化させることにより片方の足を浮かし、浮いた足が重力により前に出るが、次に反対方向に重心を移動させ本体をかた向け、その時先に述べた反対足が前進した距離だけ全体が移動し、同時に反対の浮いた足が重力により前に出ることを交互に繰り返しことにより前進する重力利用の2足歩行機構。
(もっと読む)
脚式ロボット
【課題】起伏や段差のある路面を安定に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、4個以上の距離センサ群、路面センサ、及び、コントローラを備える。記憶装置は、足リンクの目標軌道を記憶している。距離センサ群は、足裏の4箇所以上の異なる位置に配置されている。各距離センサは、夫々の配置位置における足裏と路面との間の距離を計測する。路面センサは、路面の起伏や段差の形状を計測する。コントローラは次の処理を実行する。まずコントローラは、足リンクの目標軌道と路面センサの計測値によって定まる遊脚の足裏の接地予定領域を求める。次にコントローラは、求めた接地予定領域内に配置されている距離センサ群の中から3個の距離センサを選択する。そしてコントローラは、選択された3個の距離センサの計測値が等しくなるように足リンクの姿勢を制御する。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成し、屈曲部112は、足平部100の前後方向に所定の幅を有する溝114からなり、溝114は、足平部100の前後方向の幅が爪先部102の後端から前端に向かって爪先部102の中間まで延びて形成されている。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成した。
(もっと読む)
脚式ロボット
【課題】片脚立脚時に、遊脚側に傾いたときに立脚でバランスが取り易い脚式ロボットを提供する。
【解決手段】脚式ロボット10は、一方の足リンク20の足裏面30が、脚式ロボットを正面視したときに夫々の足リンク20の足裏面における脚式ロボット10の中心線CLに近い側の縁部31が足裏面30から内側面に向かって円弧状に湾曲している。脚式ロボット10は、片脚で接地しているときに立脚の内側へ傾斜するにつれて、接地している足の足裏面と地面の接点が内側へ移動する。接点が内側へ移動するほど脚式ロボット10を内側へ傾斜させるモーメントが小さくなる。この脚式ロボット10は、内側への傾斜に応じて足裏面と地面の接点が脚式ロボットの内側へ移動するのでバランスが取り易い。
(もっと読む)
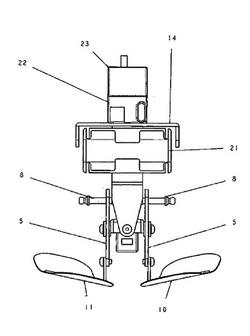
歩行玩具駆動モジュール
【課題】簡単な機構で歩行玩具の前進、左折進行、右折進行を任意に行わせることのできる歩行モジュール。
【解決手段】磁石6とコイル7を利用して上下動する一対のリンクレバー8の先端部に回動アーム9をリンクさせ、リンクレバーの上下動に伴って、回動アームの接地部が床面に接触して回動する動作方向に抗して、筐体1が回動アームの動作方向と反対方向に押し出される。リンクレバーの下端側面に突出するジョイントピン10は、回動アームのガイド溝に嵌合され、回動アームの側面に突出する固定ピンが筐体の内側側面に嵌合し、リンクレバーの上下動に伴って、回動アームの接地部が略円形の軌跡を生じるように構成し、リンクレバーの上下動に伴って付属アームをリンクさせ、且つ、上下動する一対のリンクレバーを交互に動作させて筐体を前進歩行させ、または何れか一方のリンクレバーのみを動作させて右回り又は左回りのいずれかの歩行動作を行う。
(もっと読む)
1 - 20 / 129
[ Back to top ]