
Fターム[2C150DA27]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 手 (97)
Fターム[2C150DA27]に分類される特許
81 - 97 / 97
走行模型体
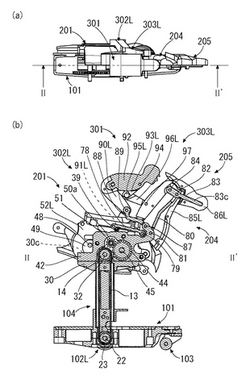
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車(101)と、台車車(101)に固定された固定部材(42、43および30)と、固定部材(42、43および30)に揺動可能に取り付けられた胴体部(201)と、固定部材(42、43および30)に揺動可能に取り付けられると共に胴体部(201)と連係された首部(204)と、固定部材(42、43および30)に第1連結部材(80)を用いて揺動可能に連結されると共に首部(204)に揺動可能に取り付けられた頭部(205)とを有する。
(もっと読む)
手長猿の縫いぐるみ人形

【課題】 手長猿の縫いぐるみ人形に自由に動く手の機能をくわえ、その変化状態を占いに結び付ける人形遊びを提供する。
【解決手段】 人形の全方位に回転する手が顔面部や胴部のマグネットに付着して様々な手振り表現をし、これを占い遊びと結びつける手長猿縫いぐるみ人形。
(もっと読む)
綱渡り玩具
【課題】猿などの動物、人形が蔦などの綱にぶら下りながら綱を手繰るようにして渡る動作を呈し、興趣が深い綱渡り玩具を提供する
【解決手段】玩具体1は、前後方向に回動可能な左右腕体26,27及び左右脚体32,33と、左右腕体26,27及び左右脚体32,33を左右交互に前後方向に回動する作動機構及び作動機構を駆動させる駆動機構とを有している。左右腕体26,27及び左右脚体32,33の係合部が棒状体45に係合して玩具体1がぶら下がった状態で作動機構が左右腕体26,27及び左右脚体32,33を前後方向に反復回動作動させ、玩具体1が棒状体45に沿って移動し、綱渡りの動作を呈する。
(もっと読む)
打楽器演奏マニピュレータとそのマニピュレータを備えたロボット
【課題】 アクチュエータの性能に関わらず、単打もロールも好適に実施することができるマニピュレータと、そのマニピュレータを備えるロボットを提供する。
【解決手段】 本発明のマニピュレータは、打楽器を演奏するマニピュレータであり、スティックと、スティックを回転自由に支持している支持部材と、スティックの先端が打楽器の打面に向かう側の回転力をスティックに付与しておく付勢手段と、スティックと当接することによってスティックの回転限界を規制するとともに支持部材に配置されているストッパと、支持部材を動かすアクチュエータとを備える。
(もっと読む)
電気教育用セット
【課題】 この発明は、子供の電気に対する関心を喚起するための教育用玩具を提供することを課題とする。
【解決手段】 この発明の電気教育用セットは、電気によって作動し、乾電池ホルダー3を備えた電気作動体1と、前記乾電池ホルダー3に装着可能な手動発電機5とを組み合わせて構成し、乾電池6と手動発電機5とを任意に交換できるようにしたものである。この発明で使用される手動発電機5の出力部分の形状は、乾電池の代わりに乾電池ホルダー3に装着可能な形状とし、乾電池ホルダー3には乾電池6と手動発電機5との何れかを自由に装着することができるようにする。
(もっと読む)
ロボットによる任意形状物体の把持方法
【課題】 視覚センサを有し、ロボットハンドによって任意形状物体を適切に把持することを可能とするロボットによる任意形状物体の把持方法を提供する。
【解決手段】 視覚センサで取得した画像情報を基にして把持対象物を所定の単純形状に当てはめ(ステップS1)、その大きさと向きを求め(ステップS3)、種別に応じてその単純形状の向きと大きさからロボットハンドの把持姿勢を設定する(ステップS11、21、31)。求めた把持姿勢からロボットハンドの手首位置を算出し(ステップS13)、逆運動学解析により、アーム、胴体の目標姿勢を求め(ステップS15)、モータを制御して目標姿勢を得(ステップS17)、把持を行う(ステップS19)。
(もっと読む)
ネイルアート玩具
【課題】簡単な操作で短時間に爪にネイルアートを施すことができるネイルアート玩具を提供すること。
【解決手段】玩具本体1内には所定のデザインのシールaがベーステープ6aの裏面に仮着されたシールテープ6を供給する供給リール4と、この供給リール6に巻きつけられたシールテープ6を巻取る巻取リール5とを所定の間隔をおいて配置し、上記巻取リール5を玩具本体1の外部から回転操作可能に構成し、上記供給リール4と巻取リール5との中間には上記シールテープ6の下方に指先を載置する載置部50を配置し、該載置部50に対面するシールテープ6の上方には上記シールテープ6を載置部50上の指の爪に押し付け、上記シールaを上記爪に転着する押圧部材33を配置した。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
(もっと読む)
ムーブメントトイ
【目的】
磁石の回転運動により、擬似生物構造体が水中で規則正しい動きと予測のつかない1/fゆらぎの動きをするムーブメントトイを得る
【構成】モーターを備えた磁石回転駆動部、1つ以上の磁石を装着し、フレキシブルな構造の擬似生物構造体及び水および粒子をいれる容器から構成される。
(もっと読む)
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
(もっと読む)
人形玩具
【課題】単に腕部、脚部を交換して人形玩具の外観を変えて遊ぶ人形玩具から、新たな発想の胴体部1に腕部、脚部を取り付けて、従来の遊び方とは全く異なる新規の人形遊びを楽しむことのできる人形玩具を提供すること。
【解決手段】人形玩具は、頭部および胴体部1の骨格を構成する骨格部材4と、該骨格部材4に着脱自在に形成された腕部材2、脚部材3とで構成し、上記骨格部材4には粘土5を付着させて頭部及び胴体部1の外観を形成するようにした。
(もっと読む)
形状保持性を有する玩具用芯材及びその芯材を備える玩具
【課題】 軸芯部位の動きがスムーズであり、折り曲げ反復耐久性があるとともに、容易に変形可能で形状保持性を有し、組立てコストの安価な軸芯部材、ならびにリアルな動きをする可動性部分を有する玩具を提供する。
【解決手段】 熱可塑性樹脂製成形物を、延伸または圧延することによって得られた、90度の曲げ戻り角が30度以下で、曲げ強度が10〜300Nである棒状物からなる芯材は、手で変形可能であり、その形状を保持することができ、折り曲げ反復耐久性がある。
また、芯材は玩具あるいは人形の芯材として適しており、取り扱いが安全で、必要部分を屈曲等することで自由に形状を変化させることができ、さらにその形状を保持することが可能な玩具を得る。
(もっと読む)
動作人形
【課題】人形を動作させると共に、人形下部にターンテーブル部を設けて、人形を回転させ、人形周囲の人に対して、人形の動作を見せることが可能な動作人形を提供することを課題とする。
【解決手段】頭部、左腕部、右腕部、左足部を動作させる動作部を有する人形体と、前記人形体を乗せ回転するターンテーブル部と、音楽情報を記憶した記憶手段と、音声出力を行う音声出力手段とを構成する。
(もっと読む)
ボール・ソケット継手により接合される複数の身体部品を有するフィギュア玩具
複数の身体部品を備え、ボール・ソケット継手構造により、それぞれが動作可能に次々と接合されるようになっている関節式フィギュア玩具(1000)であって、ボール・ソケット継手構造はそれぞれ、身体部品の領域から突出したボール部(10)を有し、また、接合用身体部品にある対応するソケット部(15)も有し、ボール部(10)はシャフト(30)に支持されるノブ(20)を有し、ソケット部(15)はノブ(20)を回転可能に受け入れるソケットを有し、上記ボール・ソケット継手構造の1つまたは複数において、ソケット部(15)には内部にソケットを有するとともに輪郭のあるキャビティ構造(50)が設けられ、前記輪郭のあるキャビティ構造(50)は前記輪郭のあるキャビティ構造でのシャフト(30)の動きの範囲を制限する、関節式フィギュア玩具。  (もっと読む)
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
会話処理装置および方法、並びに記録媒体
【課題】 ユーザに楽しく自然な会話を提供する。
【解決手段】 ロボット1のプロファイルメモリ121には、ユーザの趣向に関するデータ(プロファイルデータ)が記憶されている。サーバ101の話題データベース110には、話題となる情報が記憶されており、その情報は、ロボット1に対してインターネットなどを介して提供される。ロボット1は、提供された情報のうち、プロファイルメモリ121に記憶されているプロファイルデータをフィルタとし、フィルタ112Bによりフィルタリングした結果、残った情報のみが、話題メモリ76に記憶される。話題メモリ76に記憶されている情報は、ユーザと会話している時に用いられる。
(もっと読む)
81 - 97 / 97
[ Back to top ]