
Fターム[2C150DA27]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 手 (97)
Fターム[2C150DA27]に分類される特許
41 - 60 / 97
弦楽器用マニピュレータ、及び弦楽器演奏ロボット
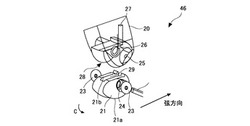
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器用マニピュレータは、弦51を指板52に押し当てる押し当て部材21と、押し当て部材21を保持する本体部20と、本体部20を指板52に対して近接離間させる左手用アクチュエータ13と、押し当て部材21を本体部20に対して回動可能に支持するシャフト22と、本体部20と押し当て部材21との間に設けられ、押し当て部材21を指板52に押し付ける方向に付勢するねじりばね26と、を備え、左手用アクチュエータ13が指板52を本体部20に対して近接離間させることによって、押し当て部材21が回動して弦方向の押し当て位置が変化するものである。
(もっと読む)
人形の関節

【課題】関節部の美観を損なわず、かつ、関節部を深い屈曲角度に屈曲させることが可能な関節部を提供する。
【解決手段】人形の胴体に連結される第一部材7と、該第一部材7の端部に関節部1を介して屈曲可能に連結される第二部材8とで構成される棒状部材における関節部であって、関節部は、一端側関節部と、他端側関節部と、一端側関節部と前記他端側関節部を回転可能に連結する一対の連結部とからなり、連結部は、一端側軸機構と、一端側角度規制機構と、一端側軸機構と平行に所定距離離間した他端側軸機構と、他端側関節部の回転角度を規制する他端側角度規制機構と、各機構を被覆し、関節部の伸長状態から屈曲状態において、前記第一部材の端部及び第二部材の端部と一体となった外観をなす一対の曲面部を含む。
(もっと読む)
動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラムを得ることを目的とする。
【解決手段】資料の説明を受けている来場者の反応量を測定する反応量測定部2を設け、身体制御部3が反応量測定部2により測定された反応量に応じて身体を制御する。これにより、プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる。
(もっと読む)
打楽器演奏マニピュレータ及び打楽器演奏ロボット
【課題】簡便に連打間隔をコントロールすることが可能な打楽器演奏マニピュレータを提供すること。
【解決手段】本発明の一態様に係る打楽器演奏マニピュレータ10は、スティック15と、スティック15を回転自在に支持する手部23fと、手部23fを動かして、スティック15の先端がドラム30の打面30aに向かう回転力をスティック15に付与するアクチュエータ28と、スティック15と当接することによって、スティック15の打面30aから離れる側の回転限界を規定する上側ストッパ13と、上側ストッパ13の位置を変更して、スティック15の回転範囲を変えるアクチュエータ14とを備えるものである。
(もっと読む)
鉄棒ロボット
【課題】 鉄棒で大車輪をするロボットの回転を継続させるため、慣性モーメントの強弱出来ることを可能にして、簡単な構造で、大車輪の継続が出来るようにする。
【解決手段】 ロボットの動作の電源は、ロボットに電池を内蔵し、受信機とサーボモータもロボット内に内蔵して、制御信号には、外部の送信機からの無線を使います。
大車輪で上昇時、回転半径を小さくする為、サーボモータで、ロボットの腕と脚を同時に屈曲させるて、慣性モーメントを小さくし、大車輪の継続を可能にする。
(もっと読む)
弾性締結具及びこれを用いたアクチュエータモジュール
【課題】工具無しで、手でも簡便に分解結合することができ、堅くかつ反復的な分解結合が可能な弾性締結具及びこれを用いたアクチュエータモジュールを提供する。
【解決手段】本弾性締結具は、被結合材に形成された挿入孔に弾性的に挿入可能な中空型ソケット200と、中空型ソケットの中空に結合される固定ピン100とを含むことを特徴とする。一方、アクチュエータモジュールは、弾性締結具の挿入のための少なくとも1つの挿入孔を具備した第1側板と、同第2側板と、互いに対向する2つの側面を含むハウジングと、上記ハウジング内に内蔵されたアクチュエータの駆動軸に結合され、少なくとも1つの挿入孔を具備した平板形状の第1連結部材と、上記第1連結部材に形成された挿入孔に弾性的に挿入可能になる中空型ソケット及び上記中空型ソケットの中空に結合される固定ピンとを含む弾性締結具とを含んでなることを特徴とする。
(もっと読む)
羽子板などの飾り物
【課題】伝統的な技法の押絵のもつ立体感だけでなく、人物全体に自然な立体感を付与するとともに、リアリテイのある人物を有し、また耐久性と安定性のある人物を有する羽子板などの飾り物を提供する。
【解決課題】複数の押絵を組み合わせ一体的に形成された衣装部1と、衣装1を配置する板部25と、衣装部1の裏面に配置された柱状保持部10と、立体構造の頭部30とを備え、凸状に湾曲するアーチ状の衣装部1を板部25に配置し、衣装部1の上部から柱状保持部10に保持された頭部30が突設する人物29を有する。
(もっと読む)
人形体
【課題】 人形体において、関節を再現する連結部分を容易に揺動させることができる一方で、所定の角度で当該連結部分を長時間維持させることができるようにする。
【解決手段】 胸部102と腰部103とが回動可能に連結された人形体であって、胸部102に回動可能に接続され、直立状態において、腰部103に対して、第1の当接位置と第2の当接位置にて当接させることが可能な当接部301を備え、当接部301は、直立状態において、腰部103を回動させた場合に、前記第1の当接位置にて腰部103より受ける力のうち、当接部301を回動させるように作用する力の向きと、前記第2の当接位置にて腰部103より受ける力のうち、当接部301を回動させるように作用する力の向きとが、反対方向となるように構成されていることを特徴とする。
(もっと読む)
マスコット人形
【課題】 キーホールダー、携帯電話などに付けるマスコットとして、単純同一の外観をもちながら、指で頭を押すと各人形ごとに固有の腕の動きをし、音楽に合わせてリズム遊びを楽しんだり、お年寄りやリハビリ時の手指の運動を楽しくしたりする、リズム遊びマスコット人形群を提供する。
【解決手段】上半身と、該上半身内を摺動するように取り付けられた下半身、ならびに前記上半身に対して回転するように取り付けられた両腕に連結し、上半身を上下に動かすことにより両腕を動かすことができる動作手段より構成されるマスコット人形。
(もっと読む)
ロボットアームおよびそれを備えるロボット
【課題】必要に応じてボディバルーンを収縮、膨張させ、ロボットの運搬作業を容易に行う。
【解決手段】ロボット10は、ロボットアーム12を含み、パソコン18等から送信される遠隔操作情報に基づいて、自身の動作を制御する。ロボットアーム12は、アームバルーン14および関節部材16を含み、たとえば関節部材16aを介してボディバルーン58に接続される。アームバルーン14およびボディバルーン58は、柔軟な気密シートによって形成され、かつ気体の出し入れを行う空気栓20を備える。この空気栓20から空気を出し入れすることによって、アームバルーン14等は、膨張および収縮が可能である。ロボット10を運搬するときには、アームバルーン14およびボディバルーン58内の気体は抜かれる。すなわち、ロボット10は、バルーンによって形成される部位を収縮させて折り畳む等した状態で運搬される。
(もっと読む)
指人形玩具
【課題】 本発明は従来の指人形では表せない下半身の動き、特に両足の動きを自由にできるような仕組みを持ち、指人形を見たときに、より、楽しく見えるような指人形を作成する。
【解決手段】 この課題を解決するための請求項1の発明は指人形に於いて人形の背面腰部に少なくとも1つの指挿入部を備えた指人形であって、その指挿入部から差し入れた指が人形の前面下部に少なくとも1つ設けられた足穴から出て、足穴から出た指が指人形の部品に覆われずに露出し、その露出した指があたかも指人形の足に見えるように指人形を操ることができる機構を備えた指人形。
(もっと読む)
乳幼児おもちゃ
【課題】比較的長期間に亘って子供の興味を惹くことのできる乳幼児おもちゃを提供する。
【解決手段】乳幼児おもちゃ11は、複数の球状部材12と、複数の棒状部材13と、ジョイント部材14とを備え、各構成部品には、凸部15aと凸部15aを受け入れる凹部15bとによって球状部材12と棒状部材13、球状部材12とジョイント部材14、棒状部材13と棒状部材13、または棒状部材13とジョイント部材14とを着脱自在に連結する連結部15が設けられている。
(もっと読む)
ロボットとロボットの制御方法
【課題】 把持する物体の形状等を正確に把握することなく、物体を把持することができるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指を有するハンド部と、各指に少なくとも一つずつ配設されており、各指の所定箇所と把持対象物との接触を検出する接触センサ群と、少なくとも把持対象物の形状を記述する形状情報を入力し、ハンド部が把持対象物を把持したときに接触センサ群が出力する信号群を予測する予測手段と、接触センサ群から出力されている信号群が、予測手段によって予測された信号群に等しくなるように、各指の動作を制御するハンド制御手段とを備える。
(もっと読む)
爪進退式玩具およびこの使用方法
【課題】 操作部材を操作することで、爪を出し入れできる爪進退式玩具とその使用方法の提供。
【解決手段】 回動操作される操作部材6を有する基部材2と、基部材に対して関節組立体10を介して軸支され、初期位置から回動位置に回動され、かつ操作部の押圧解除により回動位置から初期位置に回動されるように回動付勢される手組立体20と、手組立体の内部に位置する待機位置と、複数の爪部12aが手組立体の先端から突出する突出位置との間で移動され、かつ待機位置に移動付勢される爪部材12と、手組立体の回動動作に連動して爪部材を突出位置に移動させるための連動機構を備える。
(もっと読む)
手旗おもちゃ
【課題】 遊戯者と遊戯者とが向かい合い、出された指令やその反応に対して、また質問やその回答に対して旗の上げ下げの操作を行ない、この結果を相互に判断して遊ぶことが出来るような、またこのような操作に係るマイコンなどの電子回路が不要な、手に持って手軽に操作する手旗おもちゃを提供する。
【解決手段】 持ち手部分と上げ下げ可能な左右2つの旗を備えると共に、この2つの旗を択一的に上げ下げするための操作部を備えている手旗おもちゃとした。またこれを人形などの具象形としても良い。この手旗おもちゃは持ち手部分を持って支え、操作部で左右2つの旗の内の何れか一方を択一的に上げ下げする、すなわち右側の旗を上げる、左側の旗を上げるなどの動作を行なわせるものである。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
人形玩具
【課題】関節の動きの自由度が大きく、人形に様々な姿勢をとらせることができ、且つ安定感に優れた人形玩具を提供する。
【解決手段】頭部2と、胴部3と、胴下部4と、腕部5と、脚部6とから構成される人形玩具1であって、胴部3は、頭部2、胴下部4、腕部5を連結させるための球体連結部13を有し、胴下部4は、球体連結部13を嵌め合わせるための球状凹部及び脚部6を連結させるための球体連結部14を有し、腕部5は、肩部51、上腕部52、下腕部53及び手部54で構成され、肩部51は胴部3の球体連結部13に連結され、上腕部52は肩部51に挿着され、上腕部52と下腕部53、下腕部53と手部54は球体連結部材11で連結され、脚部6は、上脚部61、下脚部62及び足部63で構成され、上脚部61は胴下部4の球体連結部14に連結され、上脚部61と下脚部62、下脚部62と足部63は球体連結部材12で連結された人形玩具とする。
(もっと読む)
コニュニケーションシステム
【課題】ペット型ロボットの動作を、単調で物足りなくならないような、しかも連帯感の持てる感情のこもった、動作とすることにより、良好なコミュニケーションが取れるコミュニケーションシステムを提供する。
【解決手段】一方のコミュニケーション装置で行われた操作者の動作を、他方のコミュニケーション装置に伝達するコミュニケーションシステムにおいて、一方のコミュニケーション装置1は、操作者の動作を検出する動作検出手段4と、動作検出手段4で検出された操作者の動作に応じて感情信号を生成し保持する感情生成手段5と、感情信号を他方のコミュニケーション装置3に送信する送信手段6と、他方のコミュニケーション装置3から送信された感情信号を受信する受信手段7と、感情信号を表示部に出力する情報出力手段8と、を備える。
(もっと読む)
ロボット用表現動作変換システム
【課題】人間の動作をたとえばモーションキャプチャで入力するだけで、その人間の動作に近似した動作を再現できるシステムを提供する。
【解決手段】動作変換システム100はモーションキャプチャ102を含み、モーションキャプチャ102で取得した人間の動作を、頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして記述しなおし、それをロボットの頭部,左手,右手および胴体の関係で、基準座標系に対する注目座標系の位置および向きデータとして近似し、その近似を満足するロボットの関節角度を計算する。
(もっと読む)
人形およびその成型方法
【課題】各関節部を骨部で連結し、多重構造としたことにより、抱いたり握ったりしたときの感触として、肉の下に骨がある人間を握ったり抱いたりしたときの感触が得られるようにする。
【解決手段】首、肩、背骨、股関節、膝、足首、ひじ、手首等の各関節を、複数の部材を回動可能にボルト等によって連結することによって回動および/もしくは軸方向に回転可能に構成し、これら各関節部を骨部で連結した骨組みの胴体を含む主要部を柔軟な軽量合成樹脂材で成型して構成した骨格をシリコンで成型して多重成型構造としたことを特徴とする。
(もっと読む)
41 - 60 / 97
[ Back to top ]