
Fターム[2C150DA27]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 手 (97)
Fターム[2C150DA27]に分類される特許
21 - 40 / 97
人形玩具の可動連結部材及び人形玩具
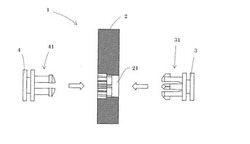
【目的】人形玩具に様々な動作や姿勢をさせる際に関節部に無理な力や負荷がかかった場合であっても関節部の脱落が著しく抑制する。
【構成】人形玩具の肘・膝の如き関節部に配設されることで腕や脚の如き各構造体同士を動作可能に連結する可動連結部材において、
腕・脚の如き構造体の内の一方に接続すると共に関節の回動用軸受孔を有する第一連結部材と、他方の構造体に接続すると共に前記第1連結部材を回動可能に軸支する回動軸を有する第2連結部材とを有して成り、
前記第2連結部材が第2−1連結部材及び第2−2連結部材の2つの部材から成り、
該第2−1連結部材と第2−2連結部材の2つの部材が、前記第1連結部材の両側から該第1連結部材を挟み込んだ状態で軸支する構成であると共に、該第2−1連結部材及び第2−2連結部材の各々に他方の構造体に接続する接続部が設けられた構成であること、
を特徴とする。
(もっと読む)
格闘玩具

【課題】ゲームを実行する場所が限定されることがなく、玩具を3次元的に動かしてダイナミックな格闘ゲームを展開することができる、新しい発想の格闘玩具を提供すること。
【解決手段】格闘人形体Aの胴体部1には頭部2、両腕部3及び付け根に歯車37を設けた両脚部4を回動可能に取り付け、格闘人形体Aを駆動する駆動装置Bには上記格闘人形体Aを連結する連結部Cを設け、該連結部Cには駆動回転体11と係合軸14とを配置し、駆動装置Bの後面には上記駆動回転体11を回転させる操作杆15を配置するとともに上記操作杆15の操作に連動して上記連結部Cを回転させるか否かを選択する選択部材16を設け、格闘人形体Aと駆動装置Bとを連結したときには上記駆動回転体11は上記脚部4の従動回転体37に連係し、操作杆15の操作で脚部4が回動するようにした。
(もっと読む)
連結部の被覆材
【課題】連結部に巻き込まれることを被覆材により防止しつつ、第一部材と第二部材とが屈曲した際にその被覆材そのものに挟まれることを防止できる連結部の被覆材を提供する。
【解決手段】可撓性を有し、撓み変形可能となるように第一部材14の所定位置に取り付けられる第一端部61と、可撓性を有し、撓み変形可能となるように第一部材14の所定位置から離間して位置する第二部材16の所定位置に取り付けられる第二端部62と、可撓性を有し、第一端部61と第二端部62とに一体的に結合され、連結部を被覆し且つ連結部から離隔可能に設けられる中間部63とを備える。中間部63の曲げ剛性は、全体に亘って、第一端部61の曲げ剛性より大きく設定されている。さらに、第一部材14と第二部材16とが屈曲する場合に、中間部63が連結部から遠ざかるように凸状に変形する。
(もっと読む)
指頭突合せ演曲遊具
【課題】閉眼して両人差指を打ち合す脳感性向上遊びに、正確に突合った際好感音を発生し、演曲や、投受球遊びが出来る遊具を提供する。
【解決手段】左右の人差指等に装着する押突サック(1)と受容サック(2)をメジャー付の連繋紐(3)にて連繋して設け、受容サック(2)に発音具(4)や音曲盤(5)を装備し、亦押突サック(1)を球状に、受容サック(2)をグローブやミットにデザイン出来る様にし、両指突合時音発や、演曲や、野球様遊び、等出来る様にした脳活性遊具。
(もっと読む)
ハンドパペットマニピュレーションシステム
【課題】従来ハンドパペットを人の手で操っていた方法を自動化制御システムで代替するハンドパペットマニピュレーションシステムを提供する。
【解決手段】ハンドパペットマニピュレーションシステム100は、制御モジュール110とパペット操作装置120とを備える。パペット操作装置120は、ベース122と、ベース122上に設けられ、第1のハンドパペットの胴体と接続され、制御信号を基にベースに対して胴体を制御する身体制御機構121と、身体制御機構121に配置され、第1のハンドパペットの頭部に接続され、制御信号を基に胴体に対して頭部を曲げ、ベースと結ぶ線が胴体の延伸方向である頭部制御機構123と、身体制御機構121に設けられ、頭部制御機構123の両側にそれぞれ配置され、第1のハンドパペットの手部にそれぞれ接続され、制御信号を基に手部を制御し、胴体に対して回転させる1対の手部制御機構とを含む。
(もっと読む)
着脱自在式ハンガー
【課題】 バッグ等にアクセサリーとして付けて所持するなど、携帯に適した美観を有し、また、操作性に優れ、コンパクトでありながらも引っ掛ける対象の多様な厚みに対応もできる着脱自在式ハンガーを提供すること。
【解決手段】 建造固定物の縁辺に掛けて設置し、それに携帯可能な物品を掛けて使用する着脱自在なハンガーにおいて、ハンガーの略全体を、動物の身体を模した形状とし、建造固定物縁辺に掛ける設置部と、携帯可能物品を掛けられる被係留部と、その設置部と被係留部との間の胴部とを備え、設置部と被係留部の少なくとも一方を、動物において耐荷重な身体部位を模した形状とする。
(もっと読む)
エンターテイメントにおけるロボットのリモコン装置、制御方法及び制御プログラム
【課題】 演劇、ミュージカル、漫才、コントなどのエンターテイメントにロボットを用いる場合、ロボットと人(役者)との演技のタイミングを合わせることができるリモコン装置、制御方法及び制御プログラムを提供する。
【解決手段】 ロボットが次の演技を行うための待機状態において、異なるID番号を付加されたリモコン装置より送信される制御信号の有無を判断し、次の動作(演技)を実行する。所定時間内に制御信号が無ければ予め定められた行動パターンを実行する。
(もっと読む)
コイン判別装置及び貯金箱
【課題】集中的に配置された検出センサにより、シュートにて拘束されたコインを判別する。
【解決手段】コイン判別装置100は、第1ケース120及び第2ケース130と、第1ケース120と第2ケース130とにより挟まれる、断面がコの字型のシュート110とで構成される。シュート110には、下に行くに従って両側が狭くなる傾斜部114、115を有する。この傾斜部114、115の少なくとも一方としてコイン退避部材131が設けられる。コイン退避部材131は、モータにより動作され、当接面131AにコインCが当接された当接状態と当接状態を解放した状態とを切換える。板116及び当接面131Aに当接されて拘束されたコインCの近傍に集中的に配置された検出センサにより、コインCの種類が判別される。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
コミュニケーション誘発システム
【課題】ぬいぐるみのような擬人的媒体を使ってユーザからのコミュニケーションを誘発できるシステムを提供する。
【解決手段】コミュニケーション誘発システム10は、ユーザ12の前方に配置されたぬいぐるみ14を含む。視線サーバ18がカメラ16で撮影したユーザ12の顔の画像からユーザの視線の方向を推定する。ぬいぐるみ14に内蔵したコンピュータは、ユーザの発話状態およびユーザの視線状態に応じて両者の間のコミュニケーション状態を推定または特定する。そして、そのコミュニケーション状態に従ってユーザにコミュニケーションを促すことができるように、ぬいぐるみの行動(発話および/または動き)を制御する。
(もっと読む)
弦楽器演奏システム、及び弦楽器演奏ロボット
【課題】簡便にビブラート奏法を行なうことができる弦楽器用マニピュレータ、及びそれを用いた弦楽器演奏ロボットを提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏システムは、弦楽器と弦楽器を演奏する弦楽器演奏ロボットとを有する弦楽器演奏システムである。弦楽器演奏ロボット100が、指板52に対して弦51を押し当てる指部を有する左手部11と、弦51を指板52に押し当てるように、指板52と指部40との距離を変化させる左手用アクチュエータ13と、左手部11を移動させて、弦の押し当て位置を変化させる腕用アクチュエータ17と、有し、指板52の弦側側面が円筒の側面形状であり、腕用アクチュエータ17が左手部11を円筒の中心軸57と平行に移動させている。
(もっと読む)
弦楽器演奏用のロボットハンドおよび弦楽器演奏用のロボット
【課題】大出力のアクチュエータを用いることなく、大きなビブラートストローク量を確保することが可能な弦楽器演奏用のロボットハンドを提供すること。
【解決手段】指部本体と、該指部本体に取り付けられ、弦を押さえるための接触子を先端に有した揺動リンク機構と、を備える指部を含む、弦楽器演奏用のロボットハンドにおいて、接触子を弦に押し付けるように指部本体を移動させた際に、揺動リンクが弦に対して相対的に位置を変化しながら揺動するように指部を構成するとともに、揺動リンクの揺動を妨げる向きに力を付与する力付与手段が設けられており、接触子が弦と接触を保った状態で、接触子を弦に押し付ける方向に指部本体を移動させることで、揺動リンクが揺動し、接触子が弦を押さえたまま弦の長手方向に移動可能となるように構成した。
(もっと読む)
ロボット玩具
【課題】サーボモータのリード線が弛むことなく、しかも外部に露出することのないロボット玩具を提供すること。
【解決手段】サーボモータが内蔵されたサーボモータユニットを備え、サーボモータによる駆動によって、隣り合う2つのブロックの間で構成される関節部に屈伸動作をさせる関節ロボット玩具であって、一方のブロックには、軸線が同一直線上に位置する出力軸及び固定軸がケースから突出して形成されたサーボモータユニットが設けられ、他方のブロックには、サーボモータユニットの出力軸に固定されてサーボモータユニットの軸線を中心に回動可能に連結される連結部が設けられ、サーボモータユニットの内部機器に接続されたリード線は、サーボモータユニットの固定軸の軸心から導出されると共に導出部分が一方のブロック又は他方のブロックに固定的に支持され、導出部分は、屈伸動作に追従して、軸心導入部分を中心に回動可能に構成されている。
(もっと読む)
ロボット及びその制御方法
【課題】簡略な構造で軽い優れたロボットアームを備える新たなロボットを提供する。
【解決手段】ロボット本体と、前記ロボット本体に設けられ、前記ロボット本体に対して回転可能な第1肩関節と、前記第1肩関節にその一端側が設けられ、前記第1肩関節と共に前記ロボット本体に対して回転可能な支持部と、前記支持部の他端側に設けられ、前記支持部に対して回転可能な第2肩関節と、前記第2肩関節にその一端側が設けられ、前記第2肩関節と共に前記支持部に対して回転可能なアーム部と、を備えることを特徴とするロボット。
(もっと読む)
筋力トレーニング装置
【課題】第1の関節軸と第2の関節軸とを結ぶリンクの長さの調整に伴って、ワイヤの長さが自動的に調整され、トルク発生源のトルク制御によってワイヤの初期張力を安定して再現することができ、筋力トレーニングを効果的に行うことができるようにする。
【解決手段】ベース部に固定された第1関節軸と、第1関節軸の周りに回転可能で長さが調節可能な第1リンクに設けられた第2関節軸と、第2関節軸の周りに回転可能な第2リンクとを有し、第2リンクは、第2関節軸と同軸の第2プーリと、第2プーリを正転及び逆転方向に駆動する2系統のワイヤとによって、第1関節軸と同軸に設けられた第1プーリにより駆動され、第1プーリは、相互に分離した正転方向の系統のワイヤを巻き付けるプーリと逆転方向の系統のワイヤを巻き付けるプーリとから成り、プーリの角度関係を変化させることによってワイヤの長さを調整する。
(もっと読む)
引き剥がし遊具
【課題】 主に高齢者が身体機能の低下を防止するための遊び(訓練を含む)が、簡単な構成と簡単な操作でスリリングで楽しく且つ集中力を高めて行うことができる引き剥がし遊具を提供することを目的としている。
【解決手段】 丸棒からなる遊具本体2と、この遊具本体2に設けられた該2を延長した形態である一方の手で握る握り部3と、遊具本体2に設けられた固定面ファスナー4と、この固定面ファスナー4に剥がし自在に係着される剥がし面ファスナー5と、遊具本体2内に設けられた中空部(図示せず)に収納された鈴からなる音出し手段6と、この音出し手段6の発する音を外に出すための音出し穴7とからなっている。
(もっと読む)
擬似ペット
【目的】擬似ペット同士が互いに自発的に交信・交流を行うことができる擬似ペットもしくは縫ぐるみ等のキャラクタ形態物を提供する。
【構成】ユーザーが連れて歩く擬似ペット(コンピュータを含み、電気的に作動する装置で、肉体に相当する部分を有するもの)であって、近傍のエリアにある他の擬似ペットに受信されるように、「擬似ペットによる所定の挨拶信号」を、無線で送信するための挨拶信号送信手段と、近傍のエリアにある他の擬似ペットから無線で送信された「擬似ペットによる所定の挨拶信号」を受信するための挨拶信号受信手段と、を含むことを特徴とする擬似ペットもしくは縫ぐるみ等のキャラクタ形態物である。
(もっと読む)
人形玩具
【課題】環境温度の変化と太陽光の照射の何れにも反応して皮膚の色調が変化する興趣性を高めた人形玩具を提供する。
【解決手段】胴部2、頭部3、左右の腕部4,4及び左右の脚部5,5で構成され、各部材が塩化ビニル樹脂にサーモクロミック材料及びフォトクロミック材料を配合してなる成形材料を用いて成形され、環境温度の変化及び太陽光の照射により色調が変化する人形玩具1とする。
(もっと読む)
人形の関節構造及び該関節構造を備えた人形
【課題】 関節を屈曲させた際に各部材間に生じる隙間を狭くすることができる人形の関節構造を提供する。
【解決手段】 一対の外装部材と両外装部材の間に位置付けられる関節部材とが各部材の中空部に通された弾性体によって互いに牽引されることによって連結されている人形の関節構造において、いずれか一方の外装部材の先端部における関節の屈曲方向側に位置する外装面を切り欠いてなる切欠部を形成し、関節部材から一方の外装部材の先端部に形成された切欠部を塞ぐように干渉緩和片を伸ばし、関節を所定角度以上屈曲させない状態において干渉緩和片が一方の外装部材の外装面の一部となり、関節を所定角度以上屈曲させた状態において他方の外装部材の外装面が干渉緩和片と干渉して干渉緩和片が一方の外装部材の内方へと沈み込むことで切欠部に窪みが形成されて該窪みに他方の外装部材の先端部における関節の屈曲方向側に位置する外装面が嵌り込むようにする。
(もっと読む)
板書連携プレゼンロボット、板書連携プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターの板書を再生する際、その板書の再生に合わせて、その板書の内容に対応する身振りを実現することができるようにする。
【解決手段】プレゼンターの板書が記録されている録画データを取得し、その録画データに記録されている板書を解析する板書解析部4と、板書解析部4の解析結果にしたがって上肢等の動作命令を生成する動作命令生成部6とを設け、板書再生部8が板書を再生する際、その板書の再生に合わせて、動作命令生成部6により生成された動作命令にしたがって板書連携プレゼンロボット10の右手等を動かすアクチュエータを制御する。
(もっと読む)
21 - 40 / 97
[ Back to top ]