
Fターム[2C150DA27]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 手 (97)
Fターム[2C150DA27]に分類される特許
61 - 80 / 97
人形およびその成型方法
【課題】各関節部を骨部で連結し、多重構造としたことにより、抱いたり握ったりしたときの感触として、肉の下に骨がある人間を握ったり抱いたりしたときの感触が得られるようにする。
【解決手段】首、肩、背骨、股関節、膝、足首、ひじ、手首等の各関節を、複数の部材を回動可能にボルト等によって連結することによって回動および/もしくは軸方向に回転可能に構成し、これら各関節部を骨部で連結した骨組みの胴体を含む主要部を柔軟な軽量合成樹脂材で成型して構成した骨格をシリコンで成型して多重成型構造としたことを特徴とする。
(もっと読む)
ロボットの関節機構

【課題】ロボットの関節機構において、省スペースに収めることができるコンプライアンス機構を提供する。
【解決手段】ベース部202に第1指部203を軸支する構造において、ウォームホイール207の内部に第1指部203の動きに連動して変形する歪リング208を配置する。ウォームホイール207がベース部202内のサーボモータによって駆動され回転すると、歪リング208を介して駆動力が第1指部203に伝わり、負荷に応じて歪リング208が変形する。そして、さらにウォームホイール207が回転すると、案内ガイド用スリット220の端部にストッパ用突起219が接触して、ウォームホイール207から第1指部203に直接力が伝わる。案内ガイドスリット内でストッパ用突起219が移動できる範囲においては、変形可能な歪リング208を介して駆動力が伝わるので、第1指部203の動きがコンプライアンスを伴ったものとなる。
(もっと読む)
加減計算教育補助具またはコンピュータ画面上に表示される加減計算教育補助用表示要素
【課題】 小学校低学年児または未就学児あるいは知能障害者に簡単に加減計算の教育に役立つ教育補助具またはコンピュータ画面上に表示される加減計算教育補助用表示要素を提供すること。
【解決手段】 加減計算教育補助具において、左の足に装着し、数「5」が常に一纏めとしてイメージ(観念)される左足用靴下補助具と、右の足に装着し、数「5」が常に一纏めとしてイメージ(観念)される右足用靴下補助具と、左手に装着し、挿入される手の指によって折り曲げ可能に構成され、「0」から「5」までの数をイメージさせる左手用手袋補助具と、右手に装着し、挿入される手の指によって折り曲げ可能に構成され、「0」から「5」までの数をイメージさせる右手用手袋補助具との一組の各補助具とからなる。
(もっと読む)
可動玩具のジョイント、及び可動玩具
【課題】 可動玩具のポーズを長時間に亘って持続し易く、しかも付け替え易い可動玩具のジョイント、及び可動玩具を課題とする。
【解決手段】 可動玩具1の第1の構造体と第2の構造体との間を可動可能に連結するジョイント20であって、第1及び第2の構造体の各々に着脱可能な第1及び第2パーツ30,40を有し、第2パーツ40が第1パーツ30を回動可能に支持する。第2パーツ40に対する第1パーツ30の回動位置を、任意の回動位置に制止する回動制止機構をさらに設けた。回動制止機構は、第1パーツ30の回動中心線の周方向に設けられた複数の回動制止溝77と、複数の回動制止溝77の一つに噛合して回動位置の制止を行う回動制止爪84を有する第3パーツ50と、を備える。第3パーツ50は、第2パーツ40と連れ回りするように第2パーツ40に支持又は保持される。
(もっと読む)
演奏制御装置、楽器演奏ロボット、ロボットによる楽器演奏方法
【課題】接触位置の損傷による楽器の短命化を防止する。
【解決手段】ロボット6は、バチ先をドラム2の打撃面の垂直方向に移動させて演奏を行うとすると、指令分解部21は、入力されたバチ先の下死点位置を示す3次元の位置指令データを、水平方向成分と垂直方向成分とに分解する。ばらつき成分付加部22は、水平方向成分データにばらつき成分データを付加する。指令合成部23は、ばらつき成分が付加された水平方向成分データと、指令分解部21が分解した垂直方向成分データとを合成して位置指令データを生成する。演奏指令部24は、指令合成部23生成の位置指令データに従いマニピュレータ8へ動作指令信号を送出する。マニピュレータ8は、その指令信号に従いアーム10を下死点位置まで振り下ろすことで演奏を行うが、このとき打撃点はばらつき成分によりドラム2の打撃面上にばらつく。
(もっと読む)
人形の関節部材、該関節部材を備えた人形及び人形の関節部材の連結方法
【課題】 両関節体の連結力が強く、また、見栄えの良い外観形状を有する人形の関節部材を提供する。
【解決手段】 人形の関節を挟んで一方側に位置する一方側外装部材に連結される一方側関節体と他方側に位置する他方側外装部材に連結される他方側関節体とを連結してなる人形の関節部材において、一方側関節体の他方側関節体と向かい合う対向面に突出軸を形成し、他方側関節体の一方側関節体と向かい合う対向面に該対向面の反対面へ貫通する突出軸受け孔を突出軸に嵌るように形成し、突出軸受け孔の両開口間の一部に突出軸の軸径よりも狭い内径の軸締め部を形成し、両関節体を互いに回転可能に連結する。
(もっと読む)
ロボット装置及び関節装置
【課題】
共通部品により構成され左右対称に可動し得るロボット装置を提案する。
【解決手段】
本発明は、左右対称に可動可能な左側腕部ユニット5L及び右側腕部ユニット5Rを有するロボット1であって、左右略同一形状でなり左側腕部ユニット5L又は右側腕部ユニット5Rの肘から手首までの間を構成する前腕モジュール71と、左右同略一形状でなり上記前腕モジュール71に対して当該前腕モジュール71の長手方向を回転軸として所定回転範囲内で回転可能に取り付けられた手首部83と、手首部83に取り付けられる手の甲モジュール72とを設け、手の甲モジュール72は、左側腕部ユニット5L及び右側腕部ユニット5Rのいずれにおいても当該手の甲モジュール72における手の甲側がロボット1の外方に向くように手首部83に取り付けられるようにした。
(もっと読む)
人形の関節部材及び該関節部材を備えた人形
【課題】 関節の屈曲状態を保持する能力が高く、また、見栄えが良い人形の関節構造を提供する。
【解決手段】 人形の関節を挟んで一方側に位置する一方側外装部材に連結される一方側関節体と人形の関節を挟んで他方側に位置する他方側外装部材に連結される他方側関節体とを連結してなる人形の関節部材において、一方側関節体の他方側関節体と向かい合う対向面に突出軸を形成すると共に該突出軸と同心円状に位置付けられる環状軸受け部を形成し、他方側関節体の一方側関節体と向かい合う対向面に突出軸受け部を一方側関節体の突出軸が嵌るように形成すると共に該突出軸受け部と同心円状に位置付けられる環状軸を一方側関節体の環状軸受け部に嵌るように形成し、両関節体を互いに回転可能に連結する。
(もっと読む)
人形の球状関節
【課題】関節部の美観を損なわず、かつ、関節部を深い屈曲角度に屈曲させることが可能な球状関節部を提供する。
【解決手段】人形の胴体に連結される第一部材7と、該第一部材7の端部に球状関節部1を介して屈曲可能に連結される第二部材8とで構成される棒状部材における前記球状関節部1であって、前記一端側関節部2は円形状の連結板22を備えるとともに、該連結板22の円心から外周縁に延びた貫通長孔25を備え、他端側関節部3は貫通長孔25に、該長孔25の孔長さ方向に移動自在に挿入して一端側関節部2と他端側関節部3を摺動可能に連結する回転軸51を備えて構成され、該他端側関節部3は回転軸51を被覆する左右のカバー部6によって球状の外観をなすように構成されている。
(もっと読む)
玩具
【課題】より娯楽性の高い玩具を提供すること。
【解決手段】魚焼きグリルを有するガスレンジを模した本体部21の前面に、瞼を模した身体部22Aを配設し、本体部21の下面に脚を模した身体部22B、22Cを配設し、本体部21の左右両側面に腕を模した身体部22D、22Eを各々配設して擬人化する。操作入力部25B、25Cからの入力に応じて身体部22Aが上下して瞬きを真似、身体部22B、22Cが交互に伸縮してスウィングを真似る。更に、操作入力部25A〜25Cからの入力に応じて音声出力部23及び光出力部24A〜24Cが各々出力する。また、本体部21の上面後部に配設された擬似コック帽27がトースタの動作を真似る。
(もっと読む)
液晶ディスプレイと液晶ディスプレイ衝撃緩和形状スイッチを組み込んだロボット玩具
【課題】 ロボット玩具等「ロボット」のアミューズメント性を高め、購買意欲を向上させる、ロボット玩具のアイデアを提供する。
【解決手段】 ロボット筺体の表面(一面または部分的)に液晶ディスプレイと、液晶ディスプレイを衝撃から守る形状をしたスイッチを組み合わせて設置し、液晶ディスプレイに投影表示された映像(静止画または動画)をロボット筐体そのもののデザインの一部として構成する。
【効果】 ロボット玩具そのものの動作と液晶ディスプレイの映像の連動により、既存のロボットには無かった使い方(遊び方)が実現できる。
(もっと読む)
コミュニケーションロボット
【構成】コミュニケーションロボット10は、全身に分散配置された複数のピエゾセンサシートすなわち触覚センサ58を含み、触覚センサ58の出力のパターンと、コミュニケーション相手の位置および姿勢に関する情報とを対応付けた、登録相手ごとのマップを記憶するマップDB92を備える。マップDB92に記憶された複数の相手のマップを用いて、取得した触覚センサ出力ベクトルと、たとえば眼カメラ50で撮影した画像データから検出した相手の位置・姿勢とに基づいて、触行動をしている相手が誰であるかを特定する。ロボット10はたとえば認識相手に合わせた行動を実行する。
【効果】IDタグを装着させなくても触覚に基づいて個人認識を行うことができ、より自然なコミュニケーションを実現できる。
(もっと読む)
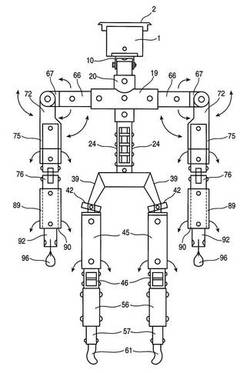
脚式歩行ロボット並びにその静的バランス制御方法
【課題】 静的バランスのくずれを、チューニング等の煩雑な分解作業を行うことなく、外部からの簡単な操作で調整して修正することのできる脚式歩行ロボット、並びに脚式歩行ロボットの静的バランス制御方法をを提供する。
【解決手段】 ロボット外表面を覆う柔軟なウェア4に、流体を充填することが可能な多数の密室空洞部5を設けて、選択した密室空洞部に充填する流体の量を加減することによりロボットの静的バランスを制御するようにした脚式歩行ロボット並びにその静的バランス制御方法の構成。
(もっと読む)
人形
【課題】顔に目、鼻、口、耳を描かずに木肌を露出させて木目を生かした表情や木肌の温もりを残し、腕部を可動できる人形を提供する。
【解決手段】人体と同形状の頭部12、頸部14、肩部16、腕部18、胴部20、腰部22、大腿部24、脛部26、足部28を、すべて木材で構成し、腕部18と肩部16とを、腕部18に設けられた腕貫通孔30に挿通され、かつ肩部16から胴部20の背面を貫通する胴貫通孔34に挿通されて胴部20の背面で結束された上紐36を介して連結し、足部28における木目模様38を正面44から見て縦方向に表れるようにした。
(もっと読む)
自動マリオネット装置
【課題】本発明は、楽音演奏にあわせて手足を自動的に上げ下げする自動マリオネット装置で、音楽要素とあやつり人形の素朴さとを組み合わせて、これまでに無かった新しい種類の玩具や娯楽装置を提供するものである。
【解決手段】本発明は自動的に演奏しかつ自動的にあやつり人形の手や足を上下に動かして演奏に合わせて踊っているかの様に見せる自動マリオネット装置で、手や足から構成されるあやつり人形と当該人形の首や左手や左足や右腕や右足等の各部位を個別に上げたり下げたりする人形駆動部と、楽音データを格納する記憶部と、前記楽音データに基づいて楽音を発生する楽音演奏部と、前記記憶部から楽音データを読み出して適当な処理をした後に適当な時間間隔で前記人形駆動部や前記楽音演奏部に当該処理データを送出する制御部等で構成され、前記楽音データを演奏しながらあやつり人形の手や足を自動的に動作させることを特徴としたものである。
(もっと読む)
人形玩具
【課題】
体部を大きくすることなく、内部に音声機構を組み込み、また、一方の腕部を動かすと、他方の腕部も連動して動く人形を提供する。
【解決手段】
本発明は、胴部と頭部、左腕部、右腕部を有し、頭部は胴部よりも大きいものとされ、右腕部は軸部を有し、また、前記胴部の側面に回転可能に軸止され、また前期右腕部には付属物が取り付けられ、一方左腕部は胴部に軸止され、また、頭部はその内部が空洞とされ、前記空洞部に、電池と電池ホルダー、音声基板、スピーカー、スイッチホルダーとが設置され、また、頭部から下方に延設されたスイッチホルダーの先端にリーフスイッチを有し、前記電池ホルダーは帽子部により蓋をされ軸部を有する方の腕部を回転させると、これに連動して他方の腕部も回転し、また、動きに連動して人形が音声を発する人形玩具とするものである。。
(もっと読む)
紙芝居や操り人形劇が出来たり、動物や人形が、いないいないバアーをする押し車。
【課題】現在市販されている押し車は、手前に重心があり、前が浮いたり等、不安定で幼児が転んだりまた、同じ物が動くだけなので、飽きやすく、さらに幼児が成長すれば、すぐ使わなくなり、他の用途もないので、不用品となる等の問題があった。
【解決手段】前輪にカムを取り付けて、重心を中央付近に置き、いないいないバアーを取り付ける事により表情が豊かになり、またネジにより他の物と簡単に交換できたり、付属の部品を使えば、紙芝居や、操り人形劇が出来る押し車。
(もっと読む)
リハビリ教育用患者模擬ロボット並びにリハビリ教育方法
【課題】実際の生身の患者に類似した応答を示し、リハビリの訓練・教育に適したリハビリ教育用患者模擬ロボットを提供することを目的とする。
【解決手段】コンピュータに予め症例に応じたリハビリの標準施術モードを入力しておき、回動可能な2部材接合により構成される関節が所定のトレーニングにより受ける荷重の変化を測定し、上記標準施術モードと比較して評価するようにした。これにより、リハビリのトレーニングを反復して行なえると共に、高度のリハビリ技術を短期間で習得できるものである。
(もっと読む)
走行玩具
【課題】 左右の脚の位相差を変えることができる走行玩具を提供すること。
【解決手段】 モータ動力でもって左右の脚を前後に揺動動作させて走行する走行玩具において、正逆回転可能なモータと、前記モータが一方向に回転した際に前記左右の脚を第1の位相差をもって揺動動作させるための第1のクラッチ機構と、前記モータが他方向に回転した際に前記左右の脚を第2の位相差をもって前記第1のクラッチ機構におけると同じ運足方向に揺動動作させるための第2のクラッチ機構と、前記第1のクラッチ機構と前記第2のクラッチ機構とを前記モータの回転方向に応じて選択的に作動させるクラッチ切換機構とを備えることを特徴とする。
(もっと読む)
走行模型体
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車101と、台車101に固定された固定部材(42、43および30)と、固定部材に揺動可能に取り付けられた胴体部201と、胴体部201に揺動可能に取り付けられた脚部202R/Lおよび203R/Lと、胴体部201に中心を外して回転可能に保持された偏心カム(54fR、54rR、54fL、54rL)と、偏心カムの回転を第1リンクを介してそれぞれ脚部へ伝達する第1伝達部(55fR、55rR、55fL、55rL)と、偏心カムの回転を第1リンクと異なる第2リンク(56fR、56rR、56fL、56rLと、59fR、59rR、59fL、59rLの組み合わせ)を介して脚部へ伝達する第2伝達部とを有する。
(もっと読む)
61 - 80 / 97
[ Back to top ]