
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、関節駆動機構および複数の指機構を駆動させて手作業等を行うことが可能なロボットハンドに関する。
【背景技術】
【0002】
この種のロボットハンドとしては、各関節部にモーターを設置し各関節部を直接モーターで回転させ、指機構を屈伸させている。このようなロボットハンドの機構では、指機構の各関節を個別に回転させることができ、指機構の自由度を高く設定することができる(例えば、特許文献1参照。)。
【0003】
他の従来装置としては、各関節部をワイヤーで連結し、1本のワイヤーを引くだけでロボットハンドのすべての指機構を屈伸させることができる。このようなロボットハンドの機構では、駆動源の数を押えることができる(例えば、特許文献2参照。)。
【特許文献1】特開2001−287182号公報
【特許文献2】特開2003−181787号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1のように、ロボットハンドの指機構の自由度を高く設定するために、駆動源であるモーターを各指機構の関節部に設置すれば、指機構が大きくなり人の手のサイズ相当のハンドを実現することができない。また指機構先端部にもモーター設置されていて重くなっているので、指機構付け根部のモーターは大きなトルクを必要とすることから、さらにロボットハンドのサイズが大きくなってしまう。
【0005】
また特許文献2では、一つのモーターでロボットハンド指機構の屈伸を行っているので、ハンドが複雑な構成をしているし、自由度が1つなのでロボットハンドに複雑な動きをさせることができない。
【0006】
従って、人の手のサイズに相当した大きさで多自由度を有したロボットハンドを実現するのは極めて困難なことであった。
【0007】
そこで本発明は、上記従来の問題に鑑みてなされたものであり、関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明の関節駆動機構は、リンク部材が関節部を介して連結され、前記関節部を駆動部が駆動するようにした関節駆動機構において、前記駆動部は出力の異なる複数の駆動素子からなることにある。
【0009】
前記本発明の関節駆動機構は、駆動素子に出力の異なる直動式アクチュエータを使用し、出力の大きな直動式アクチュエータで、リンク部材を大きな駆動力が必要な方向に作動させ、出力の小さなアクチュエータで、リンク部材を小さな駆動力でよい方向に作動させる。
【0010】
本発明のロボットハンドは、メインフレームと、前記メインフレームに連結され且つ複数の関節部を有した複数の指機構と、前記関節部を駆動する複数の駆動部とを備えているロボットハンドにおいて、前記駆動部は出力の異なる複数の駆動素子からなることにある。
【0011】
本発明のロボットハンドは、ロボットハンド指機構の関節部駆動に用いる駆動素子に出力の異なる直動式アクチュエータを使用し、把持力に関係する駆動素子には出力の大きな直動式アクチュエータを、把持力に関係しない駆動素子には出力の小さなアクチュエータを用いることで、軽量かつ小型のロボットハンドを実現することができる。
【0012】
本発明のロボットハンドにおいて、把持物体に作用する把持力をF、関節部中心から把持力の作用点までの距離をL1、関節部中心から駆動素子の出力が作用する点までの距離をL2とするとし、関節部の回転駆動を阻止する力をF1とすると、出力が小さい方の駆動素子の出力をFa、出力が大きい方の駆動素子の出力をFbとすると、Fa、Fbはそれぞれ、
Fa=F1
Fb=F1+F2(但し、F2=F×L1/L2)
で表されることにある。
【0013】
本発明の関節駆動機構およびロボットハンドに使用される駆動素子は、電気信号にて駆動素子自身が伸縮するのが好ましい。かかる場合には、各駆動素子の収縮、伸長量がコンピュータでコントロールすることができ、関節部の制御が容易に行える。従って、適切な把持力の発生、正確な指機構の位置決めを行うことで複雑な把持動作を実現することができる。
【0014】
本発明の関節駆動機構およびロボットハンドは、ワイヤー等の駆動力伝達部を介して、関節部を駆動するのが好ましい。前記関節部と駆動素子との連結に駆動力伝達部を用いることで、駆動素子は適宜任意の部位に設置でき、ロボットハンド等の構成を小型にすることができるとともに、駆動素子は、設置場所が限定されないため、様々な仕様の直動式アクチュエータを採用することができる。
【0015】
本発明のロボットハンドに使用される駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている。駆動素子に中空部を設けることでロボットハンド等の構成を小型にすることができる。
【0016】
本発明のロボットハンドに使用される前記駆動素子を伸縮方向に案内するガイド手段が設けられている場合には、駆動素子の出力を安定させ、把持動作の安定化を図ることができる。
【発明の効果】
【0017】
本発明によれば、関節駆動機構が軽量かつ小型になり、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを容易に製造できる。
【発明を実施するための最良の形態】
【0018】
以下、本発明にかかるロボットハンドの実施の形態について図面を参照しつつ詳細に説明する。
【0019】
実施の形態1
【0020】
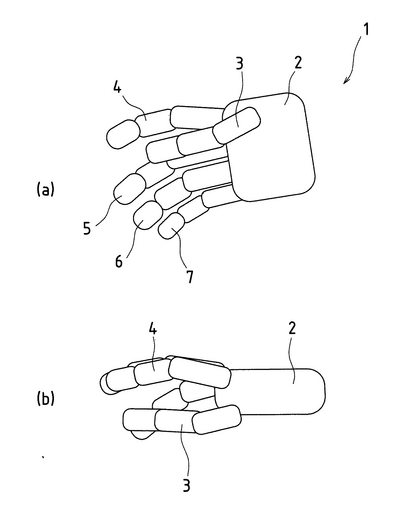
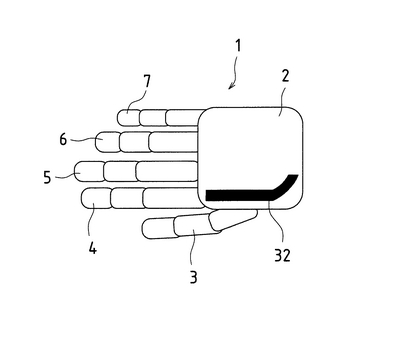
図1(a)、(b)は本発明におけるロボットハンド1を示し、同図(a)はロボットハンドの全体正面図を、同図(b)はロボットハンドの全体平面図を示している。ロボットハンド1は、人の手で言う掌部に相当するメインフレーム2と、メインフレーム2に取り付けられている複数本の指機構3、4、5、6、7とを備えている。指機構3は人の手で言う親指に相当し、指機構4は人の手で言う人差し指に相当し、指機構5は人の手で言う中指に相当し、指機構6は人の手で言う薬指に相当し、指機構7は人の手で言う小指に相当する。よって、指機構3と指機構4の腹が相互に対向するように設置され、かつ指機構4、5、6、7は並設されている。
【0021】
本実施の形態1のロボットハンド1は、指機構が5本設置されているものを例示するが、これに限定されることはなく、これより多くの指機構が設置されていても良いし、また少なくても良い。しかし、物体を把持するためには、少なくとも2本の指機構が必要であり、また把持した物体を片手で持ち替えるには、少なくとも3本の指機構が必要である。さらに、人と違和感のないロボットハンドを必要とするのなら、指機構は本発明における実施の形態のように5本設置するのが好ましい。
【0022】
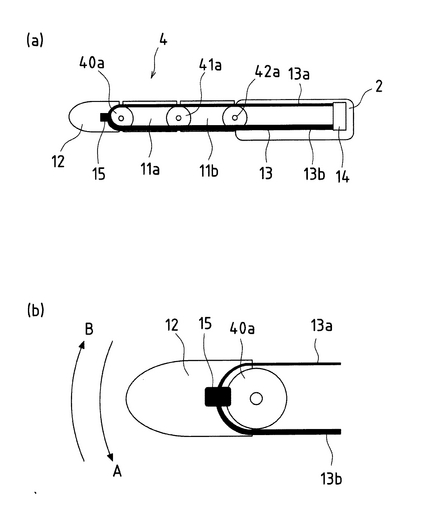
図4に指機構4の構成を示す。他の指機構3、5、6、7に関しては同様の構成なので図示および詳細な説明は省略する。指機構4は、複数のリンク部材としての指フレーム11a、11bおよび指先端部12と、それぞれを連結する関節部10a、10b、10cとからなる。
【0023】
指先端部12と指フレーム11aとを連結する関節部10aは、駆動プーリ40aからなる。両方の指フレーム11a、11bを連結する関節10bは、アイドラプーリ41aと、駆動プーリ41bとからなる。指フレーム11bをメインフレーム2に連結する関節部10cは、アイドラプーリ42a、42bおよび駆動プーリ42cとからなる。
【0024】
各駆動プーリ40a、41b、42cには、駆動部13、43、44がそれぞれ連結されており、駆動部13、43、44が各関節部を回転駆動させる。具体的には、駆動部13が駆動し、関節部10aが回転すると指先端部12も関節部10aを中心に回転する。駆動部43が駆動し、関節部10bが回転すると、それより指先にあるフレーム11a、回転部10aおよび指先端部が回転部10bを中心に回転する。駆動部44が駆動し、関節部10cが回転すると、それより指先にあるフレーム11a、11b、指先端部12および関節部10a、10bが、間接部10cを中心に回転する。
【0025】
次に関節部の駆動原理を説明する。
【0026】
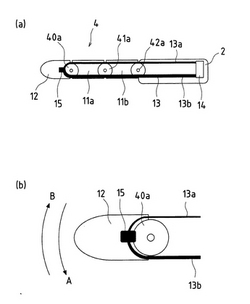
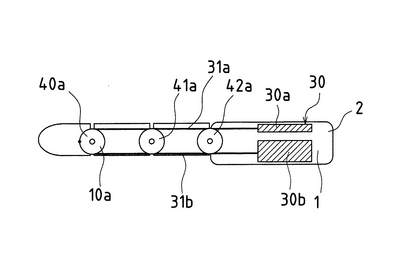
図2(a)、(b)は、指先端部12と指フレーム11aとを連結する関節部10aの駆動について説明した図である。他の関節部10b、10cについても同様の原理で駆動するので、図示および詳細な説明は省略する。
【0027】
関節部10aに連結されている駆動部13は、出力の異なる2種類の索状の駆動素子13a、13bからなり、一方の駆動素子13aと他方の駆動素子13bのそれぞれの一端が、メインフレーム2に設けられた駆動素子固定台14に取り付けられている。また、両方の駆動素子13a、13bのそれぞれの他端は、アイドラプーリ41a、42aを通過し、駆動プーリ40aに設けられた駆動素子連結器15を介して駆動プーリ40aに取り付けられている。
【0028】
各駆動素子13a、13bは、電気信号によって自身を収縮又は伸長させることができる直動式駆動素子である。かかる駆動素子として、例えば高分子アクチュエータなどがある。高分子アクチュエータは、さまざまなものが開発されているが、小型、軽量なので今後さまざまな分野で利用されることが期待されている。
【0029】
他方の駆動素子13bが収縮し、一方の駆動素子13aが伸長すると、関節部10aは回転駆動し、指先端部12は矢印Aの方向(折れ曲がる方向)に回転する。また、一方の駆動素子13aが収縮し、他方の駆動素子13bが伸長すると、関節部10aは回転駆動して指先端部12は矢印Bの方向(伸びる方向)に回転する。ここで駆動素子13a、13bの出力、すなわち収縮して物体を引っ張る力、ここでは駆動プーリ40aを矢印A方向又は矢印B方向に回転駆動させる力であるが、それは等しく設定されていてもよい。しかし、物体を把持するためには非常に大きな力が必要となってくるので、駆動素子サイズは大きくなってしまい、ロボットハンドのサイズを小さくすることができない。
【0030】
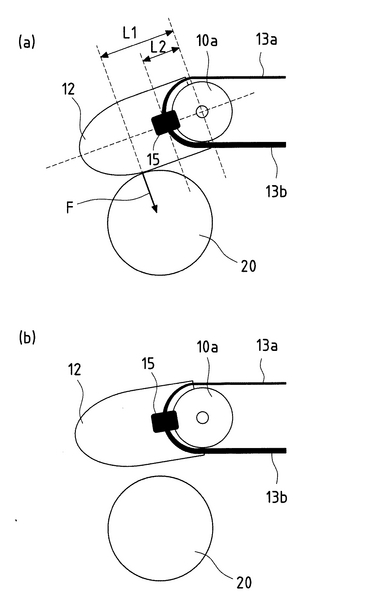
そこで、両方の駆動素子13a、13bのうち、把持に関係しない一方の駆動素子13aについては、その出力を小さくすることができる。例えば図3(a)のように他方の駆動素子13bが収縮すると、指先端部12は手の平側に回転し、把持物体20に接触する。その状態から更に駆動素子13bを収縮させる(すなわち出力を上げる)ことで、指先端部12が把持物体20に作用する力を大きくすることができ、把持力を上げることができる。よって、他方の駆動素子13bは把持に必要な力以上の出力が必要となる。
【0031】
しかし、図3(b)のように、一方の駆動素子13aが収縮すると、指先端部12は手の平とは反対の方向に回転するので、把持物体20からは離れていく。よって、一方の駆動素子13aは把持には関係がないのでその出力を小さく設定することができる。
【0032】
ここで、各駆動素子13a、13bに必要な出力について説明する。一方の駆動素子13aは、把持には必要ないので大きな力必要としないが、ロボットハンドの関節部10aを回転するのに必要な力を出力する必要がある。関節部10aには、その回転駆動を阻止する摩擦力や、指先端部12などの負荷があるので、それら回転駆動を阻止する力F1より大きな力を出力するように駆動素子13aの出力Faは設定されなければならない。
【0033】
他方の駆動素子13bはこのF1に加えて把持に必要な力を出力しなければならない。図3(a)を用いて説明すると、把持物体20に把持力Fを加えようとした場合に、他方の駆動素子13bが必要とされる出力F2は、関節部10aの中心から把持力Fの作用点までの距離をL1、関節部10aの中心から他方の駆動素子13bが関節部10aに連結されている駆動素子連結器15までの距離をL2とすると、
F2=F×L1/L2 ・・・(1)
で表される。他方の駆動素子13bは、F2とF1を加えた力を出力する必要がある。よって、一方の駆動素子13aに必要な出力Faと、他方の駆動素子13bに必要な出力Fbはそれぞれ、
Fa=F1 ・・・(2)
Fb=F1+F2 ・・・(3)
となる。
【0034】
把持に関与しない一方の駆動素子13aの出力を小さくすると、駆動素子13aの容積を小さく押えることができるので、より人の手に近いサイズのロボットハンドを実現することができる。例えば、一方の駆動素子13aの断面積を、他方の駆動素子13bの断面積よりも小さくする。断面積を小さくするとは、駆動素子13a、13bが単体のものであれば、一方の駆動素子13aを、他方の駆動素子13bよりも細くする。また、駆動素子を積層(束ねる場合も含む)して形成する場合には、一方の駆動素子13aの積層数を少なくする。
【0035】
次に、各駆動素子13a、13bに必要な伸縮量であるが、各駆動素子13a、13bに必要な伸縮量は、指先端部12が設定されている回転角度を満たすのに必要な収縮伸長より長く設定されている必要がある。また駆動素子13a、13bが同一材料から製作されたものであれば、収縮ないし伸長率は等しい。よって駆動素子全長を等しくしてやると駆動素子の収縮ないし伸長する量、すなわち変位量は等しくなる。
【0036】
また、各駆動素子13a、13bは電気信号で制御できることが望ましい。関節部10aの回転角は、指先端部12の屈伸位置(指フレーム11aに対する指先端部12の屈曲角度)に相当する。また、関節部10aの回転角は駆動素子13a、13bの収縮、伸長量によって決まる。よって、駆動素子13a、13bの収縮、伸長量が制御できなければ指先端部12の位置は定まらず、複雑な把持の実現が難しくなるので人の手に近いロボットハンドを作成することができない。そこで、各駆動素子13a、13bが電気信号で制御できれば、それらの収縮、伸長量がコンピュータでコントロールすることができ、把持動作全体を見た先端部の位置決めが可能となるのでより複雑な把持を実現することができる。
【0037】
実施の形態2
【0038】
図5〜図9は、本発明の実施の形態2を示す。前記実施の形態1で例示した駆動素子13a、13bは、関節部10aに直接取り付けられており、関節部10aに巻きついたり離れたりしている。また、駆動素子13a、13bは、関節部10b、10cを通り越して関節部10aに取り付けられているので、関節部10b、10cの回転によってそれぞれの個所で曲がることができるなど、状況の変化で柔軟に曲がることができるような柔軟性を有する場合に有利である。
【0039】
直動式駆動素子の中には、収縮、伸長量は大きいが出力が小さいものがある。そのような駆動素子の場合、全長は短くて済むが、所定出力を得るために断面積を大きくする必要がある。このように断面積の大きな駆動素子は、柔軟性の点で不利であり、前記駆動素子13a、13bのように指機構の中を通って指先端部12に直接連結すると、関節部10a、10b、10cの駆動を妨げてしまうので、前記実施の形態1で示した構成では不可能である。そこで、このような駆動素子の駆動力を各関節部に伝達する駆動力伝達部が必要となってくる。その具体例を以下に示す。
【0040】
図5および図6は、指機構4の機構を説明した図である。他の指機構に関しては同様の構成なので、図示および詳細な説明は省略する。指機構4は、複数の指フレーム11a、11bおよび指先端部12からなり、それぞれを関節部10a、10b、10cが連結している。関節部10aは駆動プーリ40aからなり、関節10bはアイドラプーリ41aおよび駆動プーリ41bからなり、関節部10cはアイドラプーリ42a、42bおよび駆動プーリ42cからなる。各駆動プーリ40a、41b、42cには、駆動力伝達部31、32、33の一端がそれぞれ連結され、駆動力伝達部31、32、33の他端は駆動部30、45、46にそれぞれ連結されている。
【0041】
次に、関節部の駆動原理を説明する。
【0042】
関節部10aを駆動する駆動部30は、出力の異なる2種類の駆動素子30a、30bから構成され、両方の駆動素子30a、30bはメインフレーム2に設置されている。各駆動素子30a、30bには駆動力伝達部31a、31bがそれぞれ連結されており、各駆動力伝達部31a、31bは、アイドラプーリ42a、41aを通って関節部10aの駆動プーリ40aと連結されている。よって、駆動素子30a、30bの出力は駆動力伝達部31a、31bによって関節部10aに伝達され、関節部10aを駆動することができる。
【0043】
この場合の駆動素子30a、30bの伸長、収縮量は物体を把持するのに十分な回転角を関節部10aに与えることができるが、直接関節部10aに連結してしまうと容積が小さくなくなるので、式(2)、(3)を満たすような出力を発生することができない。そこで、図5および図6に示すように駆動力伝達部31a、31bを介して駆動素子30a、30bを関節部10aに連結すれば、駆動素子30a、30bをメインフレーム2に設置できるので、駆動素子30a、30bは容積を大きくとることができ、式(2)、(3)を満たす出力を発生することができる。
【0044】
ここで、駆動力伝達部31a、31bは、断面積が小さく且つ柔軟性および引っ張り力に富むワイヤーやベルト等を挙げることができる。ギヤを複数個並べて駆動力を伝達しても良いが、軽量化、小型化などを考えるとワイヤーが最適である。
【0045】
本実施の形態2の場合でも、駆動素子30a、30bを必要以上に大きくすることはロボットハンド全体のサイズを余分に大きくすることになるので、把持力に関係しない一方の駆動素子30aは式(2)を、把持力に関係する他方の駆動素子30bは式(3)を満足するように設定してやればよい。そうすれば一方の駆動素子30aを小さくすることができるので、より小型のロボットハンドを実現することができる。
【0046】
本実施の形態2では、駆動素子30a、30bをメインフレーム2に設置しているが、それに限定されるわけではない。例えば、駆動素子をロボットハンドの手首、腕等のロボットハンド以外の部位に設置することが可能である。その場合、各関節部との連結は駆動力伝達部で連結してやればよい。駆動素子を手首、腕等のロボットハンド以外の部位に設置した場合、ロボットハンドがコンパクトになるばかりでなく、ロボットハンド自体が軽量化になる。そうすると、ロボットハンドを取り付けるアームへの負荷が低減できるので、手首の駆動力の低下、アームの位置制御が容易になるという効果が発生する。
【0047】
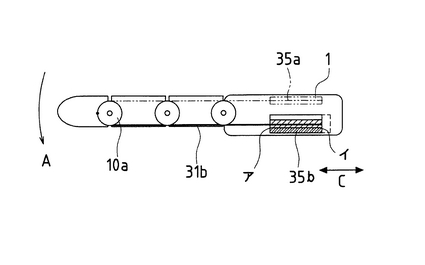
図7に電気信号によって自身の長さが伸長する方向に出力する駆動素子を用いた場合の構成を示す。同図は、他方の駆動素子35bと関節部10aとが駆動力伝達部31bで連結されている。この駆動素子35bは把持力に関係する素子である。なお、把持力に関係しない方の一方の駆動素子35aは、仮想線で示し、他方の駆動素子35bと同様の構成なので説明を省略する。
【0048】
他方の駆動素子35bは中空構造になっており、その中を駆動力伝達部31bが挿通され、駆動素子35bの一端面(関節部10aと離れた面)イで固定されている。駆動素子35bの他端面(関節部10aと近い面)アはメインフレーム2に固定され、駆動素子35bの一端面イは自由端になっている。
【0049】
よって、電気信号により駆動素子35bは、伸長したり収縮したりするため、他端面アは固定され、一端面イが矢印Cの方向に移動する。仮に、駆動力伝達部31bが駆動素子35bの他端面アで連結され他端面アが自由に動くようになっていれば、電気信号により駆動素子35bは伸長するので、関節部10aは手のひら側に回転することなく、物体の把持を行うことができない。しかし、駆動力伝達部31bを駆動素子35bの一端面イで連結すれば、電気信号により駆動素子35bの一端面イが矢印Cの方向に伸長し、それに伴って関節部10aを矢印Aの方向に回転させることができ、物体を把持することができる。
【0050】
また、駆動素子を中空構造とせずに、駆動力伝達部31bを駆動素子の外側に沿って一端面イに連結した場合には、駆動力伝達部31bのパスを確保するための経路や、一端面イとの連結のための新たな機構を追加しなければならないので、ロボットハンドの構成が大きくなってしまう。よって、駆動素子35bに中空部を設けその中を駆動力伝達部3bが通し、一端面イと連結するのが好ましい。
【0051】
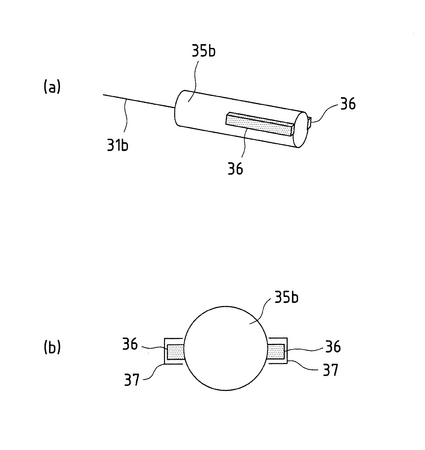
前記駆動素子35bの他端面ア側はメインフレーム2に固定されているが、一端面イ側は自由端となっていて駆動可能になっている。しかし駆動素子35が伸長、収縮する経路を決めなければ、駆動素子35bは柔軟性を有しているのでメインフレーム2内で任意の方向に伸長し、本来の出力を発生せず把持力が安定しないとか、ロボットハンドの他の部品を破壊したりするなどの恐れがある。
【0052】
そこで、駆動素子35bに図8に示すようなガイド手段を設けるのが望ましい。図8(a)は駆動素子35bの斜視図、図8(b)は駆動素子35bの正面図である。駆動素子35bの側面には伸長経路固定ガイド治具36が設けられている。この伸長経路固定ガイド治具36は、図8(b)のように、メインフレーム2に取り付けられた伸長経路固定ガイド37内に通され、伸長経路固定ガイド37は、駆動素子35bを伸長、収縮する方向を案内する。図8(b)において駆動素子35bは紙面に垂直な方向に駆動するので、駆動素子35bは伸長経路固定ガイド37がメインフレーム2内で敷かれている経路に沿って伸長、収縮を行う。
【0053】
本発明は、前記の実施の形態に限定されるものではなく、駆動素子32が柔軟性を有している場合には、この駆動素子32の設置をよりコンパクトにすることができる。例えば図9に示すように、駆動素子32をメインフレーム2に収納できるように、少し曲げて設置してやればよい。このように駆動素子が柔軟性を有していれば、駆動素子の設置を自由にコントロールすることができるので、駆動素子の形状にこだわることなくロボットハンドの設計を行うことができる。
【0054】
本発明において、前記それぞれの実施の形態の駆動素子13a、13b、30a、30b、35a、35b、32は、高分子アクチュエータの場合を例示したが、それに限定されるわけではない。直動式のアクチュエータであれば任意のものが採用できる。例えば静電力を利用して作られた静電アクチュエータや、形状記憶合金を材料として作られたアクチュエータなどがある。それらアクチュエータを用いても本発明を適用することができる。また、現在さまざまな材料から直動式アクチュエータの開発がなされているが、材料などの限定はないので、今後開発される直動式アクチュエータすべてに応用できる。
【0055】
本発明のロボットハンドにおいて、各指機構の先端部に接触センサまたは力センサ、ないしその両方のセンサを設置してよい。接触センサは把持物体と指先端部との接触を検知し、把持が始まったことを知ることができ、把持の状態を確認することができる。また力センサは把持物体にかかる把持力を検知することで、把持物体に適切な把持力を加えることができる。どちらかのセンサを搭載するのかは、ロボットハンドの用途にって変わってくると思われるが、多種多様な把持をロボットハンドで実現させるのなら、両方のセンサを搭載していることが望ましい。
【0056】
本発明の実施形態では、ロボットハンドを説明したがこれに限定されるわけではない。例えばロボットアーム部、ロボット足部など関節駆動部において適用できる個所はさまざまある。更にはロボット分野だけではない。回転駆動を行う個所において、駆動素子をモーターではなく直動式アクチュエータを使用するなら本発明は有効に利用することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態1におけるロボットハンドを示し、(a)は全体正面図、(b)は平面図である。
【図2】(a)は、本発明の実施の形態1におけるロボットハンドの指機構を示す概略断面図、(b)は、同拡大図である。
【図3】本発明の実施の形態1におけるロボットハンドの関節部を示し、(a)は、把持物体を把持する状態の平面図、(b)は、把持物体を離す状態の平面図である。
【図4】本発明の実施の形態1におけるロボットハンドの指機構の構成を示す正面図である。
【図5】本発明の実施の形態2におけるロボットハンド指機構の構成を示す概略正面図である。
【図6】本発明の実施の形態2におけるロボットハンドの指機構を示す概略断面図である。
【図7】本発明の実施の形態2の変形例を示す概略断面図である。
【図8】本発明のロボットハンドの駆動素子を示し、(a)は斜視図、(b)は概略断面図である。
【図9】本発明のロボットハンドの駆動素子の配置を示す図である。
【符号の説明】
【0058】
1 ロボットハンド
2 メインフレーム
3、4、5、6、7 指機構
10a、10b、10c 関節部
11a、11b 指フレーム
12 指先端部
13a、13b 駆動素子
14 駆動素子固定台
15 駆動素子連結器
20 把持物体
30a、30b 駆動素子
31a、31b 駆動力伝達部
32 駆動素子
35a、35b 駆動素子
36 伸長経路固定ガイド治具
37 伸長経路固定ガイド
【技術分野】
【0001】
本発明は、関節駆動機構および複数の指機構を駆動させて手作業等を行うことが可能なロボットハンドに関する。
【背景技術】
【0002】
この種のロボットハンドとしては、各関節部にモーターを設置し各関節部を直接モーターで回転させ、指機構を屈伸させている。このようなロボットハンドの機構では、指機構の各関節を個別に回転させることができ、指機構の自由度を高く設定することができる(例えば、特許文献1参照。)。
【0003】
他の従来装置としては、各関節部をワイヤーで連結し、1本のワイヤーを引くだけでロボットハンドのすべての指機構を屈伸させることができる。このようなロボットハンドの機構では、駆動源の数を押えることができる(例えば、特許文献2参照。)。
【特許文献1】特開2001−287182号公報
【特許文献2】特開2003−181787号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1のように、ロボットハンドの指機構の自由度を高く設定するために、駆動源であるモーターを各指機構の関節部に設置すれば、指機構が大きくなり人の手のサイズ相当のハンドを実現することができない。また指機構先端部にもモーター設置されていて重くなっているので、指機構付け根部のモーターは大きなトルクを必要とすることから、さらにロボットハンドのサイズが大きくなってしまう。
【0005】
また特許文献2では、一つのモーターでロボットハンド指機構の屈伸を行っているので、ハンドが複雑な構成をしているし、自由度が1つなのでロボットハンドに複雑な動きをさせることができない。
【0006】
従って、人の手のサイズに相当した大きさで多自由度を有したロボットハンドを実現するのは極めて困難なことであった。
【0007】
そこで本発明は、上記従来の問題に鑑みてなされたものであり、関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明の関節駆動機構は、リンク部材が関節部を介して連結され、前記関節部を駆動部が駆動するようにした関節駆動機構において、前記駆動部は出力の異なる複数の駆動素子からなることにある。
【0009】
前記本発明の関節駆動機構は、駆動素子に出力の異なる直動式アクチュエータを使用し、出力の大きな直動式アクチュエータで、リンク部材を大きな駆動力が必要な方向に作動させ、出力の小さなアクチュエータで、リンク部材を小さな駆動力でよい方向に作動させる。
【0010】
本発明のロボットハンドは、メインフレームと、前記メインフレームに連結され且つ複数の関節部を有した複数の指機構と、前記関節部を駆動する複数の駆動部とを備えているロボットハンドにおいて、前記駆動部は出力の異なる複数の駆動素子からなることにある。
【0011】
本発明のロボットハンドは、ロボットハンド指機構の関節部駆動に用いる駆動素子に出力の異なる直動式アクチュエータを使用し、把持力に関係する駆動素子には出力の大きな直動式アクチュエータを、把持力に関係しない駆動素子には出力の小さなアクチュエータを用いることで、軽量かつ小型のロボットハンドを実現することができる。
【0012】
本発明のロボットハンドにおいて、把持物体に作用する把持力をF、関節部中心から把持力の作用点までの距離をL1、関節部中心から駆動素子の出力が作用する点までの距離をL2とするとし、関節部の回転駆動を阻止する力をF1とすると、出力が小さい方の駆動素子の出力をFa、出力が大きい方の駆動素子の出力をFbとすると、Fa、Fbはそれぞれ、
Fa=F1
Fb=F1+F2(但し、F2=F×L1/L2)
で表されることにある。
【0013】
本発明の関節駆動機構およびロボットハンドに使用される駆動素子は、電気信号にて駆動素子自身が伸縮するのが好ましい。かかる場合には、各駆動素子の収縮、伸長量がコンピュータでコントロールすることができ、関節部の制御が容易に行える。従って、適切な把持力の発生、正確な指機構の位置決めを行うことで複雑な把持動作を実現することができる。
【0014】
本発明の関節駆動機構およびロボットハンドは、ワイヤー等の駆動力伝達部を介して、関節部を駆動するのが好ましい。前記関節部と駆動素子との連結に駆動力伝達部を用いることで、駆動素子は適宜任意の部位に設置でき、ロボットハンド等の構成を小型にすることができるとともに、駆動素子は、設置場所が限定されないため、様々な仕様の直動式アクチュエータを採用することができる。
【0015】
本発明のロボットハンドに使用される駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている。駆動素子に中空部を設けることでロボットハンド等の構成を小型にすることができる。
【0016】
本発明のロボットハンドに使用される前記駆動素子を伸縮方向に案内するガイド手段が設けられている場合には、駆動素子の出力を安定させ、把持動作の安定化を図ることができる。
【発明の効果】
【0017】
本発明によれば、関節駆動機構が軽量かつ小型になり、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを容易に製造できる。
【発明を実施するための最良の形態】
【0018】
以下、本発明にかかるロボットハンドの実施の形態について図面を参照しつつ詳細に説明する。
【0019】
実施の形態1
【0020】
図1(a)、(b)は本発明におけるロボットハンド1を示し、同図(a)はロボットハンドの全体正面図を、同図(b)はロボットハンドの全体平面図を示している。ロボットハンド1は、人の手で言う掌部に相当するメインフレーム2と、メインフレーム2に取り付けられている複数本の指機構3、4、5、6、7とを備えている。指機構3は人の手で言う親指に相当し、指機構4は人の手で言う人差し指に相当し、指機構5は人の手で言う中指に相当し、指機構6は人の手で言う薬指に相当し、指機構7は人の手で言う小指に相当する。よって、指機構3と指機構4の腹が相互に対向するように設置され、かつ指機構4、5、6、7は並設されている。
【0021】
本実施の形態1のロボットハンド1は、指機構が5本設置されているものを例示するが、これに限定されることはなく、これより多くの指機構が設置されていても良いし、また少なくても良い。しかし、物体を把持するためには、少なくとも2本の指機構が必要であり、また把持した物体を片手で持ち替えるには、少なくとも3本の指機構が必要である。さらに、人と違和感のないロボットハンドを必要とするのなら、指機構は本発明における実施の形態のように5本設置するのが好ましい。
【0022】
図4に指機構4の構成を示す。他の指機構3、5、6、7に関しては同様の構成なので図示および詳細な説明は省略する。指機構4は、複数のリンク部材としての指フレーム11a、11bおよび指先端部12と、それぞれを連結する関節部10a、10b、10cとからなる。
【0023】
指先端部12と指フレーム11aとを連結する関節部10aは、駆動プーリ40aからなる。両方の指フレーム11a、11bを連結する関節10bは、アイドラプーリ41aと、駆動プーリ41bとからなる。指フレーム11bをメインフレーム2に連結する関節部10cは、アイドラプーリ42a、42bおよび駆動プーリ42cとからなる。
【0024】
各駆動プーリ40a、41b、42cには、駆動部13、43、44がそれぞれ連結されており、駆動部13、43、44が各関節部を回転駆動させる。具体的には、駆動部13が駆動し、関節部10aが回転すると指先端部12も関節部10aを中心に回転する。駆動部43が駆動し、関節部10bが回転すると、それより指先にあるフレーム11a、回転部10aおよび指先端部が回転部10bを中心に回転する。駆動部44が駆動し、関節部10cが回転すると、それより指先にあるフレーム11a、11b、指先端部12および関節部10a、10bが、間接部10cを中心に回転する。
【0025】
次に関節部の駆動原理を説明する。
【0026】
図2(a)、(b)は、指先端部12と指フレーム11aとを連結する関節部10aの駆動について説明した図である。他の関節部10b、10cについても同様の原理で駆動するので、図示および詳細な説明は省略する。
【0027】
関節部10aに連結されている駆動部13は、出力の異なる2種類の索状の駆動素子13a、13bからなり、一方の駆動素子13aと他方の駆動素子13bのそれぞれの一端が、メインフレーム2に設けられた駆動素子固定台14に取り付けられている。また、両方の駆動素子13a、13bのそれぞれの他端は、アイドラプーリ41a、42aを通過し、駆動プーリ40aに設けられた駆動素子連結器15を介して駆動プーリ40aに取り付けられている。
【0028】
各駆動素子13a、13bは、電気信号によって自身を収縮又は伸長させることができる直動式駆動素子である。かかる駆動素子として、例えば高分子アクチュエータなどがある。高分子アクチュエータは、さまざまなものが開発されているが、小型、軽量なので今後さまざまな分野で利用されることが期待されている。
【0029】
他方の駆動素子13bが収縮し、一方の駆動素子13aが伸長すると、関節部10aは回転駆動し、指先端部12は矢印Aの方向(折れ曲がる方向)に回転する。また、一方の駆動素子13aが収縮し、他方の駆動素子13bが伸長すると、関節部10aは回転駆動して指先端部12は矢印Bの方向(伸びる方向)に回転する。ここで駆動素子13a、13bの出力、すなわち収縮して物体を引っ張る力、ここでは駆動プーリ40aを矢印A方向又は矢印B方向に回転駆動させる力であるが、それは等しく設定されていてもよい。しかし、物体を把持するためには非常に大きな力が必要となってくるので、駆動素子サイズは大きくなってしまい、ロボットハンドのサイズを小さくすることができない。
【0030】
そこで、両方の駆動素子13a、13bのうち、把持に関係しない一方の駆動素子13aについては、その出力を小さくすることができる。例えば図3(a)のように他方の駆動素子13bが収縮すると、指先端部12は手の平側に回転し、把持物体20に接触する。その状態から更に駆動素子13bを収縮させる(すなわち出力を上げる)ことで、指先端部12が把持物体20に作用する力を大きくすることができ、把持力を上げることができる。よって、他方の駆動素子13bは把持に必要な力以上の出力が必要となる。
【0031】
しかし、図3(b)のように、一方の駆動素子13aが収縮すると、指先端部12は手の平とは反対の方向に回転するので、把持物体20からは離れていく。よって、一方の駆動素子13aは把持には関係がないのでその出力を小さく設定することができる。
【0032】
ここで、各駆動素子13a、13bに必要な出力について説明する。一方の駆動素子13aは、把持には必要ないので大きな力必要としないが、ロボットハンドの関節部10aを回転するのに必要な力を出力する必要がある。関節部10aには、その回転駆動を阻止する摩擦力や、指先端部12などの負荷があるので、それら回転駆動を阻止する力F1より大きな力を出力するように駆動素子13aの出力Faは設定されなければならない。
【0033】
他方の駆動素子13bはこのF1に加えて把持に必要な力を出力しなければならない。図3(a)を用いて説明すると、把持物体20に把持力Fを加えようとした場合に、他方の駆動素子13bが必要とされる出力F2は、関節部10aの中心から把持力Fの作用点までの距離をL1、関節部10aの中心から他方の駆動素子13bが関節部10aに連結されている駆動素子連結器15までの距離をL2とすると、
F2=F×L1/L2 ・・・(1)
で表される。他方の駆動素子13bは、F2とF1を加えた力を出力する必要がある。よって、一方の駆動素子13aに必要な出力Faと、他方の駆動素子13bに必要な出力Fbはそれぞれ、
Fa=F1 ・・・(2)
Fb=F1+F2 ・・・(3)
となる。
【0034】
把持に関与しない一方の駆動素子13aの出力を小さくすると、駆動素子13aの容積を小さく押えることができるので、より人の手に近いサイズのロボットハンドを実現することができる。例えば、一方の駆動素子13aの断面積を、他方の駆動素子13bの断面積よりも小さくする。断面積を小さくするとは、駆動素子13a、13bが単体のものであれば、一方の駆動素子13aを、他方の駆動素子13bよりも細くする。また、駆動素子を積層(束ねる場合も含む)して形成する場合には、一方の駆動素子13aの積層数を少なくする。
【0035】
次に、各駆動素子13a、13bに必要な伸縮量であるが、各駆動素子13a、13bに必要な伸縮量は、指先端部12が設定されている回転角度を満たすのに必要な収縮伸長より長く設定されている必要がある。また駆動素子13a、13bが同一材料から製作されたものであれば、収縮ないし伸長率は等しい。よって駆動素子全長を等しくしてやると駆動素子の収縮ないし伸長する量、すなわち変位量は等しくなる。
【0036】
また、各駆動素子13a、13bは電気信号で制御できることが望ましい。関節部10aの回転角は、指先端部12の屈伸位置(指フレーム11aに対する指先端部12の屈曲角度)に相当する。また、関節部10aの回転角は駆動素子13a、13bの収縮、伸長量によって決まる。よって、駆動素子13a、13bの収縮、伸長量が制御できなければ指先端部12の位置は定まらず、複雑な把持の実現が難しくなるので人の手に近いロボットハンドを作成することができない。そこで、各駆動素子13a、13bが電気信号で制御できれば、それらの収縮、伸長量がコンピュータでコントロールすることができ、把持動作全体を見た先端部の位置決めが可能となるのでより複雑な把持を実現することができる。
【0037】
実施の形態2
【0038】
図5〜図9は、本発明の実施の形態2を示す。前記実施の形態1で例示した駆動素子13a、13bは、関節部10aに直接取り付けられており、関節部10aに巻きついたり離れたりしている。また、駆動素子13a、13bは、関節部10b、10cを通り越して関節部10aに取り付けられているので、関節部10b、10cの回転によってそれぞれの個所で曲がることができるなど、状況の変化で柔軟に曲がることができるような柔軟性を有する場合に有利である。
【0039】
直動式駆動素子の中には、収縮、伸長量は大きいが出力が小さいものがある。そのような駆動素子の場合、全長は短くて済むが、所定出力を得るために断面積を大きくする必要がある。このように断面積の大きな駆動素子は、柔軟性の点で不利であり、前記駆動素子13a、13bのように指機構の中を通って指先端部12に直接連結すると、関節部10a、10b、10cの駆動を妨げてしまうので、前記実施の形態1で示した構成では不可能である。そこで、このような駆動素子の駆動力を各関節部に伝達する駆動力伝達部が必要となってくる。その具体例を以下に示す。
【0040】
図5および図6は、指機構4の機構を説明した図である。他の指機構に関しては同様の構成なので、図示および詳細な説明は省略する。指機構4は、複数の指フレーム11a、11bおよび指先端部12からなり、それぞれを関節部10a、10b、10cが連結している。関節部10aは駆動プーリ40aからなり、関節10bはアイドラプーリ41aおよび駆動プーリ41bからなり、関節部10cはアイドラプーリ42a、42bおよび駆動プーリ42cからなる。各駆動プーリ40a、41b、42cには、駆動力伝達部31、32、33の一端がそれぞれ連結され、駆動力伝達部31、32、33の他端は駆動部30、45、46にそれぞれ連結されている。
【0041】
次に、関節部の駆動原理を説明する。
【0042】
関節部10aを駆動する駆動部30は、出力の異なる2種類の駆動素子30a、30bから構成され、両方の駆動素子30a、30bはメインフレーム2に設置されている。各駆動素子30a、30bには駆動力伝達部31a、31bがそれぞれ連結されており、各駆動力伝達部31a、31bは、アイドラプーリ42a、41aを通って関節部10aの駆動プーリ40aと連結されている。よって、駆動素子30a、30bの出力は駆動力伝達部31a、31bによって関節部10aに伝達され、関節部10aを駆動することができる。
【0043】
この場合の駆動素子30a、30bの伸長、収縮量は物体を把持するのに十分な回転角を関節部10aに与えることができるが、直接関節部10aに連結してしまうと容積が小さくなくなるので、式(2)、(3)を満たすような出力を発生することができない。そこで、図5および図6に示すように駆動力伝達部31a、31bを介して駆動素子30a、30bを関節部10aに連結すれば、駆動素子30a、30bをメインフレーム2に設置できるので、駆動素子30a、30bは容積を大きくとることができ、式(2)、(3)を満たす出力を発生することができる。
【0044】
ここで、駆動力伝達部31a、31bは、断面積が小さく且つ柔軟性および引っ張り力に富むワイヤーやベルト等を挙げることができる。ギヤを複数個並べて駆動力を伝達しても良いが、軽量化、小型化などを考えるとワイヤーが最適である。
【0045】
本実施の形態2の場合でも、駆動素子30a、30bを必要以上に大きくすることはロボットハンド全体のサイズを余分に大きくすることになるので、把持力に関係しない一方の駆動素子30aは式(2)を、把持力に関係する他方の駆動素子30bは式(3)を満足するように設定してやればよい。そうすれば一方の駆動素子30aを小さくすることができるので、より小型のロボットハンドを実現することができる。
【0046】
本実施の形態2では、駆動素子30a、30bをメインフレーム2に設置しているが、それに限定されるわけではない。例えば、駆動素子をロボットハンドの手首、腕等のロボットハンド以外の部位に設置することが可能である。その場合、各関節部との連結は駆動力伝達部で連結してやればよい。駆動素子を手首、腕等のロボットハンド以外の部位に設置した場合、ロボットハンドがコンパクトになるばかりでなく、ロボットハンド自体が軽量化になる。そうすると、ロボットハンドを取り付けるアームへの負荷が低減できるので、手首の駆動力の低下、アームの位置制御が容易になるという効果が発生する。
【0047】
図7に電気信号によって自身の長さが伸長する方向に出力する駆動素子を用いた場合の構成を示す。同図は、他方の駆動素子35bと関節部10aとが駆動力伝達部31bで連結されている。この駆動素子35bは把持力に関係する素子である。なお、把持力に関係しない方の一方の駆動素子35aは、仮想線で示し、他方の駆動素子35bと同様の構成なので説明を省略する。
【0048】
他方の駆動素子35bは中空構造になっており、その中を駆動力伝達部31bが挿通され、駆動素子35bの一端面(関節部10aと離れた面)イで固定されている。駆動素子35bの他端面(関節部10aと近い面)アはメインフレーム2に固定され、駆動素子35bの一端面イは自由端になっている。
【0049】
よって、電気信号により駆動素子35bは、伸長したり収縮したりするため、他端面アは固定され、一端面イが矢印Cの方向に移動する。仮に、駆動力伝達部31bが駆動素子35bの他端面アで連結され他端面アが自由に動くようになっていれば、電気信号により駆動素子35bは伸長するので、関節部10aは手のひら側に回転することなく、物体の把持を行うことができない。しかし、駆動力伝達部31bを駆動素子35bの一端面イで連結すれば、電気信号により駆動素子35bの一端面イが矢印Cの方向に伸長し、それに伴って関節部10aを矢印Aの方向に回転させることができ、物体を把持することができる。
【0050】
また、駆動素子を中空構造とせずに、駆動力伝達部31bを駆動素子の外側に沿って一端面イに連結した場合には、駆動力伝達部31bのパスを確保するための経路や、一端面イとの連結のための新たな機構を追加しなければならないので、ロボットハンドの構成が大きくなってしまう。よって、駆動素子35bに中空部を設けその中を駆動力伝達部3bが通し、一端面イと連結するのが好ましい。
【0051】
前記駆動素子35bの他端面ア側はメインフレーム2に固定されているが、一端面イ側は自由端となっていて駆動可能になっている。しかし駆動素子35が伸長、収縮する経路を決めなければ、駆動素子35bは柔軟性を有しているのでメインフレーム2内で任意の方向に伸長し、本来の出力を発生せず把持力が安定しないとか、ロボットハンドの他の部品を破壊したりするなどの恐れがある。
【0052】
そこで、駆動素子35bに図8に示すようなガイド手段を設けるのが望ましい。図8(a)は駆動素子35bの斜視図、図8(b)は駆動素子35bの正面図である。駆動素子35bの側面には伸長経路固定ガイド治具36が設けられている。この伸長経路固定ガイド治具36は、図8(b)のように、メインフレーム2に取り付けられた伸長経路固定ガイド37内に通され、伸長経路固定ガイド37は、駆動素子35bを伸長、収縮する方向を案内する。図8(b)において駆動素子35bは紙面に垂直な方向に駆動するので、駆動素子35bは伸長経路固定ガイド37がメインフレーム2内で敷かれている経路に沿って伸長、収縮を行う。
【0053】
本発明は、前記の実施の形態に限定されるものではなく、駆動素子32が柔軟性を有している場合には、この駆動素子32の設置をよりコンパクトにすることができる。例えば図9に示すように、駆動素子32をメインフレーム2に収納できるように、少し曲げて設置してやればよい。このように駆動素子が柔軟性を有していれば、駆動素子の設置を自由にコントロールすることができるので、駆動素子の形状にこだわることなくロボットハンドの設計を行うことができる。
【0054】
本発明において、前記それぞれの実施の形態の駆動素子13a、13b、30a、30b、35a、35b、32は、高分子アクチュエータの場合を例示したが、それに限定されるわけではない。直動式のアクチュエータであれば任意のものが採用できる。例えば静電力を利用して作られた静電アクチュエータや、形状記憶合金を材料として作られたアクチュエータなどがある。それらアクチュエータを用いても本発明を適用することができる。また、現在さまざまな材料から直動式アクチュエータの開発がなされているが、材料などの限定はないので、今後開発される直動式アクチュエータすべてに応用できる。
【0055】
本発明のロボットハンドにおいて、各指機構の先端部に接触センサまたは力センサ、ないしその両方のセンサを設置してよい。接触センサは把持物体と指先端部との接触を検知し、把持が始まったことを知ることができ、把持の状態を確認することができる。また力センサは把持物体にかかる把持力を検知することで、把持物体に適切な把持力を加えることができる。どちらかのセンサを搭載するのかは、ロボットハンドの用途にって変わってくると思われるが、多種多様な把持をロボットハンドで実現させるのなら、両方のセンサを搭載していることが望ましい。
【0056】
本発明の実施形態では、ロボットハンドを説明したがこれに限定されるわけではない。例えばロボットアーム部、ロボット足部など関節駆動部において適用できる個所はさまざまある。更にはロボット分野だけではない。回転駆動を行う個所において、駆動素子をモーターではなく直動式アクチュエータを使用するなら本発明は有効に利用することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態1におけるロボットハンドを示し、(a)は全体正面図、(b)は平面図である。
【図2】(a)は、本発明の実施の形態1におけるロボットハンドの指機構を示す概略断面図、(b)は、同拡大図である。
【図3】本発明の実施の形態1におけるロボットハンドの関節部を示し、(a)は、把持物体を把持する状態の平面図、(b)は、把持物体を離す状態の平面図である。
【図4】本発明の実施の形態1におけるロボットハンドの指機構の構成を示す正面図である。
【図5】本発明の実施の形態2におけるロボットハンド指機構の構成を示す概略正面図である。
【図6】本発明の実施の形態2におけるロボットハンドの指機構を示す概略断面図である。
【図7】本発明の実施の形態2の変形例を示す概略断面図である。
【図8】本発明のロボットハンドの駆動素子を示し、(a)は斜視図、(b)は概略断面図である。
【図9】本発明のロボットハンドの駆動素子の配置を示す図である。
【符号の説明】
【0058】
1 ロボットハンド
2 メインフレーム
3、4、5、6、7 指機構
10a、10b、10c 関節部
11a、11b 指フレーム
12 指先端部
13a、13b 駆動素子
14 駆動素子固定台
15 駆動素子連結器
20 把持物体
30a、30b 駆動素子
31a、31b 駆動力伝達部
32 駆動素子
35a、35b 駆動素子
36 伸長経路固定ガイド治具
37 伸長経路固定ガイド
【特許請求の範囲】
【請求項1】
リンク部材が関節部を介して連結され、前記関節部を駆動部が駆動するようにした関節駆動機構において、前記駆動部は出力の異なる複数の駆動素子からなることを特徴とする関節駆動機構。
【請求項2】
前記駆動素子は、電気信号にて駆動素子自身が伸縮する請求項1に記載の関節駆動機構。
【請求項3】
前記関節駆動機構は駆動力伝達部を有し、前記駆動素子は、前記駆動力伝達部を介して関節部を駆動する請求項2に記載の関節駆動機構。
【請求項4】
前記駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている請求項3に記載の関節駆動機構。
【請求項5】
前記駆動素子を伸縮方向に案内するガイド手段が設けられている請求項2〜4の何れかに記載の関節駆動機構。
【請求項6】
メインフレームと、前記メインフレームに連結され且つ複数の関節部を有した複数の指機構と、前記関節部を駆動する複数の駆動部とを備えているロボットハンドにおいて、前記駆動部は出力の異なる複数の駆動素子からなることを特徴としたロボットハンド。
【請求項7】
前記駆動部は出力の異なる2つの駆動素子からなり、出力が大きい方の駆動素子はロボットハンドが把持物体を把持するときに駆動する駆動素子で、出力が小さい方の駆動素子はロボットハンドが把持物体を離すときに駆動する請求項6に記載のロボットハンド。
【請求項8】
前記ロボットハンドにおいて、把持物体に作用する把持力をF、関節部中心から把持力の作用点までの距離をL1、関節部中心から駆動素子の出力が作用する点までの距離をL2とするとし、関節部の回転駆動を阻止する力をF1とすると、出力が小さい方の駆動素子の出力をFa、出力が大きい方の駆動素子の出力をFbとすると、Fa、Fbはそれぞれ、
Fa=F1
Fb=F1+F2(但し、F2=F×L1/L2)
で表される請求項6又は7に記載のロボットハンド。
【請求項9】
前記駆動素子は、電気信号にて駆動素子自身が伸縮することを特徴とする請求項6〜8の何れかに記載のロボットハンド。
【請求項10】
前記ロボットハンドは駆動力伝達部を有し、前記駆動素子は、前記駆動力伝達部を介して関節部を駆動する請求項6〜9の何れかに記載のロボットハンド。
【請求項11】
前記駆動力伝達部はワイヤーである請求項10に記載のロボットハンド。
【請求項12】
前記駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている請求項10又は11に記載のロボットハンド。
【請求項13】
前記駆動素子を伸縮方向に案内するガイド手段が設けられている請求項9〜12の何れかに記載のロボットハンド。
【請求項1】
リンク部材が関節部を介して連結され、前記関節部を駆動部が駆動するようにした関節駆動機構において、前記駆動部は出力の異なる複数の駆動素子からなることを特徴とする関節駆動機構。
【請求項2】
前記駆動素子は、電気信号にて駆動素子自身が伸縮する請求項1に記載の関節駆動機構。
【請求項3】
前記関節駆動機構は駆動力伝達部を有し、前記駆動素子は、前記駆動力伝達部を介して関節部を駆動する請求項2に記載の関節駆動機構。
【請求項4】
前記駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている請求項3に記載の関節駆動機構。
【請求項5】
前記駆動素子を伸縮方向に案内するガイド手段が設けられている請求項2〜4の何れかに記載の関節駆動機構。
【請求項6】
メインフレームと、前記メインフレームに連結され且つ複数の関節部を有した複数の指機構と、前記関節部を駆動する複数の駆動部とを備えているロボットハンドにおいて、前記駆動部は出力の異なる複数の駆動素子からなることを特徴としたロボットハンド。
【請求項7】
前記駆動部は出力の異なる2つの駆動素子からなり、出力が大きい方の駆動素子はロボットハンドが把持物体を把持するときに駆動する駆動素子で、出力が小さい方の駆動素子はロボットハンドが把持物体を離すときに駆動する請求項6に記載のロボットハンド。
【請求項8】
前記ロボットハンドにおいて、把持物体に作用する把持力をF、関節部中心から把持力の作用点までの距離をL1、関節部中心から駆動素子の出力が作用する点までの距離をL2とするとし、関節部の回転駆動を阻止する力をF1とすると、出力が小さい方の駆動素子の出力をFa、出力が大きい方の駆動素子の出力をFbとすると、Fa、Fbはそれぞれ、
Fa=F1
Fb=F1+F2(但し、F2=F×L1/L2)
で表される請求項6又は7に記載のロボットハンド。
【請求項9】
前記駆動素子は、電気信号にて駆動素子自身が伸縮することを特徴とする請求項6〜8の何れかに記載のロボットハンド。
【請求項10】
前記ロボットハンドは駆動力伝達部を有し、前記駆動素子は、前記駆動力伝達部を介して関節部を駆動する請求項6〜9の何れかに記載のロボットハンド。
【請求項11】
前記駆動力伝達部はワイヤーである請求項10に記載のロボットハンド。
【請求項12】
前記駆動素子は中空部を有しており、前記駆動力伝達部は前記駆動素子の中空部を通過して駆動素子に固定されている請求項10又は11に記載のロボットハンド。
【請求項13】
前記駆動素子を伸縮方向に案内するガイド手段が設けられている請求項9〜12の何れかに記載のロボットハンド。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−123149(P2006−123149A)
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願番号】特願2004−318248(P2004−318248)
【出願日】平成16年11月1日(2004.11.1)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願日】平成16年11月1日(2004.11.1)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]