
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
401 - 420 / 469
電気教育用セット
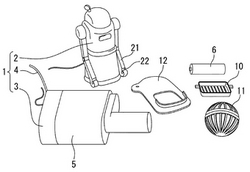
【課題】 この発明は、子供の電気に対する関心を喚起するための教育用玩具を提供することを課題とする。
【解決手段】 この発明の電気教育用セットは、電気によって作動し、乾電池ホルダー3を備えた電気作動体1と、前記乾電池ホルダー3に装着可能な手動発電機5とを組み合わせて構成し、乾電池6と手動発電機5とを任意に交換できるようにしたものである。この発明で使用される手動発電機5の出力部分の形状は、乾電池の代わりに乾電池ホルダー3に装着可能な形状とし、乾電池ホルダー3には乾電池6と手動発電機5との何れかを自由に装着することができるようにする。
(もっと読む)
電子神経部品、電子頭脳、及び、ロボット

【課題】専門的な知識を持たない一般人や若年者にも理解され易く、製作や変更が容易で、且つ、従来よりも生命らしい構造を備える電子頭脳を構成する電子神経部品を提供する。
【解決手段】電子頭脳を構成する複数の電子神経部品のうちの1つであって、論理回路を搭載した論理演算素子111を含み論理演算素子及びその周辺をフレキシブルな部材112で取り囲んでいる1つの胴体110と、論理演算素子に接続された入力線121を含み入力線及びその周辺をフレキシブルな部材122で取り囲んでいる1つ以上の入力触手120と、論理演算素子に接続された出力線151を含み出力線及びその周辺をフレキシブルな部材152で取り囲んでいる1つ以上の出力触手150とを備え、入力触手から入力された信号に基づいて論理演算素子で演算された演算結果が出力触手から出力される。
(もっと読む)
飛行体
【課題】スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供する。
【解決手段】本発明の飛行体は、回転可能に設けられ、複数の回転翼34を有するロータ3と、前記ロータ3に連動して回転する被駆動体と、前記被駆動体に当接する接触部および圧電素子を備えた振動体を有する超音波モータと、前記超音波モータを駆動する駆動回路とを備え、前記回転翼34の回転により生じる推力により飛行する飛行体であって、前記回転翼34の表面に、光を受光して光電変換し、電気を生成する太陽電池71を設け、前記回転翼34の内部に、前記太陽電池71で生成された電気を充電する充電部を有する回路部72を設けたことを特徴とする。
(もっと読む)
小型飛行装置
【課題】左右一対の羽ばたき翼により突風中でも高度な飛行性能を達成できるようにする。
【解決手段】胴体26の左右位置に翼駆動用モータ30を設け、それぞれの出力軸30aに、羽ばたき翼27a,27bを取り付ける。胴体26の所要位置に、錘29の移動により機体重心の位置を胴体26の前後左右方向へ変位させる重心移動装置28を設ける。重心移動装置28による機体重心の前後方向への変位により胴体26と一緒に各羽ばたき翼27a,27bの迎角を調整し、各翼駆動用モータ30による各羽ばたき翼27a,27bの羽ばたき作動を制御してそれぞれ発生させる揚力と推進力を制御して、飛行速度や飛行高度を自在に変更させる。左右方向への旋回時に各羽ばたき翼27a,27bより胴体26の左右位置へ大きさの異なる揚力が作用する場合は、重心移動装置28にて機体重心を左右方向へ適宜変位させて胴体26の左右方向を水平に保持させる。
(もっと読む)
走行玩具
【課題】 動力伝達ロスが少なく安定的に動力を伝達することができる遠心クラッチを備える走行玩具を提供すること。
【解決手段】 遠隔制御によって正逆回転可能に構成された操舵用直流モータと、前記操舵用直流モータの動力によって車体の左右に動作して車輪の向きを変えるための操舵アームとを備えた走行玩具において、前記操舵アームにはラック歯が形成され、前記操舵用直流モータの軸には前記ラック歯に噛合するピニオン歯車が遠心クラッチを介して付設されていることを特徴とする。
(もっと読む)
回転体
【課題】 振動モ−タによる振動を回転力に変換できる回転体と、該変換とともに各色各様の点灯パタ−ンで発光する回転体とを提供すること。
【解決手段】 回転支軸1を垂下したコマ本体2に電源(リチウム電池4等)と振動モ−タ3とを内蔵し、スイッチ機構5を介してリチウム電池4等の電源により振動モ−タ3を駆動する。
このほか、回転支軸1が均等分割点で垂下される複数軸であるもの、スイッチ機構5が遠心力を介在させて開閉される接点(+接点6、8)を有するもの、或は、各色に発光する複数のLED16を内蔵するとともに、ICチップにより各色各様の点灯パタ−ンで制御する発光制御部18を内蔵するものなどである。
(もっと読む)
飛行体
【課題】スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供する。
【解決手段】本発明の飛行体は、回転可能に設けられ、複数の回転翼34を有するロータ3と、電力により駆動し、前記ロータ3を回転させる駆動源とを備え、前記回転翼34の回転により生じる推力により飛行する飛行体であって、前記回転翼34の表面に、光を受光して光電変換し、電気を生成する太陽電池71を設け、前記回転翼34の内部に、前記太陽電池71で生成された電気を充電する充電部を有する回路部72を設けたことを特徴とする。
(もっと読む)
玩具、玩具キット、ランプ及び充電装置
【課題】 従来の熱電発電素子を備えた玩具と比較して、モータの推進力をさらに大きくすることができる玩具を提供する。
【解決手段】 火炎発生部122、火炎発生部122の上部に配置された熱電発電素子124及び熱電発電素子124の上部に配置され熱電発電素子124に熱的に接触されている水槽126を有する熱電発電部120と、熱電発電部120で発電された電力により回転可能なモータ132を有する駆動部130とを備えたことを特徴とする玩具。
(もっと読む)
ロボットによる任意形状物体の把持方法
【課題】 視覚センサを有し、ロボットハンドによって任意形状物体を適切に把持することを可能とするロボットによる任意形状物体の把持方法を提供する。
【解決手段】 視覚センサで取得した画像情報を基にして把持対象物を所定の単純形状に当てはめ(ステップS1)、その大きさと向きを求め(ステップS3)、種別に応じてその単純形状の向きと大きさからロボットハンドの把持姿勢を設定する(ステップS11、21、31)。求めた把持姿勢からロボットハンドの手首位置を算出し(ステップS13)、逆運動学解析により、アーム、胴体の目標姿勢を求め(ステップS15)、モータを制御して目標姿勢を得(ステップS17)、把持を行う(ステップS19)。
(もっと読む)
無線操縦用送信機
走行玩具の走行方向を制御する制御信号を生成して送信する無線操縦用送信機において、上部が球面状に凹陥する軸受部を備える支持体と、前記支持体が内部中央の底面から突出する下側ケースと、前記支持体が貫通するよう中央に設けられる上側ケースの開口部と、前記ケース内部に前記支持体と垂直に配置される基板と、前記基板上に開口された基板開口部の周囲に実装固着される走行玩具の進行方向を決定するための複数のスイッチと、前記各スイッチ上に配置される複数の押圧部を保持すると共に下端部が前記軸受部に回動自在に収容される球面状の軸先部とを備える操作軸とを有する無線操縦用送信機を提供する。  (もっと読む)
(もっと読む)
ロボット装置及びその動作制御方法
【課題】 ユーザ等のコミュニケーション対象をより飽きさせることのないカオス的な動作を自身の身体性に基づいて発現することが可能なロボット装置及びその動作制御方法を提供する。
【解決手段】 自己モーション算出器12は、全関節角の時系列情報に基づいて、自身の動作のみに由来する動きベクトルを算出する。モーション混合器13は、この自身の動作のみに由来する動きベクトルに基づいて入力画像の動きベクトルを補正することで、自身の動作のみに由来する動きベクトルとユーザの動作のみに由来する動きベクトルとが所望の比率で混合された動きベクトルを生成する。そしてBR抽出器14は、生成された動きベクトル等から動き特徴量を抽出し、動作生成器15は、動作ルールベース記憶器16に記憶された動作ルールベースを参照しながら、抽出された動き特徴量に応じた動作を生成する。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
(もっと読む)
玩具
【課題】移動体模型の位置又はその位置の変化を常時監視し、さらに移動体模型が道路模型上を正しく走行していない場合に、その状態を報知する。
【解決手段】基盤上における移動体模型の位置又は位置変化を移動体模型の移動に連動して非接触で検出する位置検出手段と、位置検出手段による移動体模型の位置又は位置変化の検出に基づいて、当該移動体模型の前記道路模型上における位置又は位置変化の正誤に関する情報を遊戯者に対して報知する報知手段と、を備える。
(もっと読む)
ムーブメントトイ
【目的】
磁石の回転運動により、擬似生物構造体が水中で規則正しい動きと予測のつかない1/fゆらぎの動きをするムーブメントトイを得る
【構成】モーターを備えた磁石回転駆動部、1つ以上の磁石を装着し、フレキシブルな構造の擬似生物構造体及び水および粒子をいれる容器から構成される。
(もっと読む)
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
(もっと読む)
走行玩具
【課題】 簡易な構成によりでホイルベースの調節を可能とする。
【解決手段】 左右の車輪22L,22Rをそれぞれ回転可能に支持する左右一対の車輪支持体33L、33Rと、車体90の左右の両側部に設けられ、各車輪支持体33L、33Rを前後方向に沿って移動調節可能に支持する支持部35L、35R、36L、36Rとを備えており、ホイルベースの調節は、車輪支持体33L、33Rのみを前後方向に移動させて行う。
(もっと読む)
走行玩具
【課題】 簡易迅速な作業で前輪の位置調節に伴う緩衝体の位置調節を行う。
【解決手段】 車輪22L、22Rを回転可能に支持する一対の車輪支持体33L、33Rと、車体90の左右の両側部に設けられ、各車輪支持体を前後方向に沿った支持軸34L、34Rを中心に回動可能に支持する一対の回動支持部35L、35R、36L、36Rと、を備え、各車輪支持体が、回動支持部の軸線よりも外側で車輪を支持すると共に、各車輪支持体の回動支持部の軸線よりも上部に対して車体に反発する方向に弾性力を生じる緩衝体38L、38Rを備えている。
(もっと読む)
走行玩具
【課題】 放熱板を簡単に取り付けたり取り外したりすることができる走行玩具を提供すること。
【解決手段】 走行用直流モータを格納するためのモータ格納室を閉塞するカバーを備え、前記カバーに、前記走行用直流モータで発生する熱を放射する放熱板が着脱可能に取り付けられるように構成されていることを特徴とする。また、前記カバーは本体に着脱可能に設けられ、前記モータ格納室に格納される前記走行用直流モータが交換可能に構成されていることを特徴とする。
(もっと読む)
旋回飛行玩具
【課題】 プロペラへの動力伝達ロスおよび応答遅れがなく、旋回の制御が容易な旋回飛行玩具を提供すること。
【解決手段】 プロペラを回転させるモータを搭載した飛行体と、先端を前記飛行体に連結し、基端を旋回台の旋回体に回動可能に支持させ、回動させることによって前記飛行体の前端を下方または上方に傾斜させるパイプと、姿勢制御レバーの操作に応動して、前記パイプの基端を回動させるパイプ回動機構とを備え、前記プロペラを回転させ、かつ前記飛行体を傾斜させることによって、旋回推力を得ている。
(もっと読む)
401 - 420 / 469
[ Back to top ]