
Fターム[2C150EC25]の内容
Fターム[2C150EC25]に分類される特許
21 - 38 / 38
人間のような指を有するロボットハンド
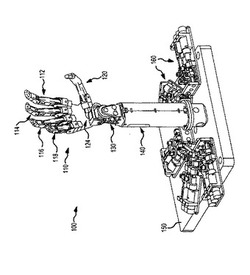
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
脚式ロボット

【課題】片脚立脚時に、遊脚側に傾いたときに立脚でバランスが取り易い脚式ロボットを提供する。
【解決手段】脚式ロボット10は、一方の足リンク20の足裏面30が、脚式ロボットを正面視したときに夫々の足リンク20の足裏面における脚式ロボット10の中心線CLに近い側の縁部31が足裏面30から内側面に向かって円弧状に湾曲している。脚式ロボット10は、片脚で接地しているときに立脚の内側へ傾斜するにつれて、接地している足の足裏面と地面の接点が内側へ移動する。接点が内側へ移動するほど脚式ロボット10を内側へ傾斜させるモーメントが小さくなる。この脚式ロボット10は、内側への傾斜に応じて足裏面と地面の接点が脚式ロボットの内側へ移動するのでバランスが取り易い。
(もっと読む)
遠隔操作のオートバイ模型
【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
無段自動変速機構及び、それを備えた自走可能な模型車両
【課題】 自走可能な模型車両のように動力源の出力が小さく、機構自体も簡便な構成が要求される場合に最適な無段自動変速機構を提供すること。
【解決手段】 モータ1の動力を入力する入力軸2上において1対の対向するハーフプーリ4・6でプーリ体を形成し、少なくとも一方のハーフプーリ6が該入力軸の軸方向と平行な方向にのみ所定の範囲内で摺動するように規制する入力側摺動規制手段60・7aを備える。出力軸10上のプーリ体におけるハーフプーリ13は軸方向及び回転向きに所定の範囲内で摺動するように規制する出力側摺動規制手段130・12aを備える。そして出力軸が低負荷時には入力側のハーフプーリ間隔が小で、出力側のハーフプーリ間隔が大である一方、出力軸が高負荷時には入力側のハーフプーリ間隔が大で、出力側のハーフプーリ間隔が小になる変速作用を行う。
(もっと読む)
ロボット玩具
【課題】より単純な構造でより自然な歩行動作を実現する。
【解決手段】胴体部1と、左右の足部を交互に前側に繰り出すように運足する一対の脚部2L、2Rと、駆動源11の駆動力を一対の脚部の各々に伝達する動力伝達機構3とを備えるロボット玩具100であって、一対の脚部は、胴体部に対して前後方向の軸を中心に揺動自在に設けられ、動力伝達機構は、駆動源の駆動に基づいて第1継手部材及び第2継手部材が一体となって回動する自在継手を備え、自在継手の回動によって、歩行面に接地した状態で前後方向に並んだ左右の足部20、20のうち、歩行面から離地する後側の一方の足部を他方の足部に対して外側に配置させ、且つ、他方の足部を追い越して接地する一方の足部を他方の足部と前後方向に並ばせるように一対の脚部を運足動作に同期させて揺動させる。
(もっと読む)
走行玩具
【課題】車体を伸長させたバギータイプの自動車形状からロボット形状へ、また、ロボット形状からバギータイプの自動車形状へと変形させることができる走行玩具を提供する。
【解決手段】前輪を備えた前方車台と、後輪を備えた後方車台と、前記前方車台と前記後方車台とを連結し、かつ車台を折り曲げるための車台折曲機構とから構成され、前記前輪と後輪の少なくとも一方を駆動する駆動手段を設け、さらに前記車台折曲機構は、前方部が前記前方車台の中間部に回動可能に嵌合され、かつ後方部が前記後方車台と回動可能に連結される車台折曲手段を含み、かつ前記前方車台の長さは少なくとも前記後方車台の長さよりも長いことにより、前記車台折曲手段を回動させて車台を折曲した際に、前記前方車台の後端部が前記後方車台よりも高い位置となるまで前記前方車台が起き上がる。
(もっと読む)
駆動装置及びこれを有するロボット
【課題】駆動ユニットの回転力を従動ユニットに伝達するケーブルに充分な張力を発生させることで、駆動ユニット及び従動ユニットとケーブルとの間に発生するスリップを防止し、回転力を損失なしに伝達する駆動装置及びこれを有するロボットを提供する。
【解決手段】駆動ユニット30と、前記駆動ユニット30と接触しないように離隔空間を挟んで設けられ、前記駆動ユニット30から発生した回転力を受けて回転する従動ユニット40と、前記駆動ユニット30と前記従動ユニット40とを連結し、前記回転力を前記従動ユニット40に伝達するケーブル50と、前記離隔空間に設けられ、前記ケーブル50に張力が発生するように前記ケーブル50が互いに接近する方向に前記ケーブル50を加圧する加圧ユニット60とを含んで駆動装置を構成する。
(もっと読む)
走行玩具
【課題】 安価にして小型且つ軽量で遊戯者が容易に取り扱うことのできるフライホイールを用いた自走式走行玩具を提供する。
【解決手段】 走行玩具1は、フライホイール7の回転を歯車列によって駆動輪22に伝達することにより自走する走行玩具1であって、歯車列は、複数の歯車を有してフライホイール用入力歯車42の回転をフライホイール軸に取付けられた最終歯車に伝達するフライホイール用歯車列と、駆動輪22の駆動軸を回転させる駆動輪用歯車2と、該駆動輪用歯車2とフライホイール用入力歯車42との間に配置される少なくとも1個の制御伝達歯車3と、で構成され、制御伝達歯車3はフライホイール用入力歯車42と駆動輪用歯車2と回転伝達を遮断するようにフライホイール用入力歯車42と駆動輪用歯車2の少なくとも一方の歯車との噛合いが解除可能とされると共に、制御伝達歯車3を噛合い解除可能とされた歯車と噛合うように移動させる制御部材50を有することとする。
(もっと読む)
模型用サーボ装置
【課題】減速機構に遊星歯車を用いて小型で高トルクを得る。
【解決手段】筐体2内に、受信機からの信号によって回転駆動させるモータ4と、大小の平歯車が同軸上に一体化された平歯車ユニット8,10,12を組み合わせることでモータ4の回転を減速伝達する減速機構6と、モータ4の駆動軸5と一致しない位置で駆動軸5に対して平行に設けられ、減速機構6から減速伝達されたモータ4の回転をサーボホーン20に伝達する出力軸7と、出力軸7の回転角度を検出するポテンショメータ27とを備え、ポテンショメータ27により検出された出力軸7の回転角度に基づいてフィードバック制御を行う模型用サーボ装置1において、減速機構6の最後段に、太陽ギア17と、太陽ギア17の周りを自転しながら周回する遊星ギア18とを備えた遊星歯車ユニット14を出力軸7の同軸上に配置する。
(もっと読む)
形態変化玩具
【課題】従来の形態変化の要素を備えながら、ユーザーの手を加えることなく形態を変化させることができる部分を備えるとともに、その形態の変化に直接関係しないが遊び心を備えた形態変化玩具を提供すること。
【解決手段】一つの形態と他の形態とに形態を変化させる形態変化玩具Aにおいて、該形態変化玩具Aは第1の部材1と、第2の部材2との2つの部材で構成するとともに、上記第2の部材2を連結部材3を介して上記第1の部材1に対して上下に回動可能に連結し、上記第1の部材1に設けたロック部材20が機能しているときは第2の部材2は第1の部材1と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材2は自重で下方に回動し、第1の部材1と上下の位置関係となって他の形態を構成するようにした。
(もっと読む)
ラジオコントロールカーの操舵制御装置
【課題】 ポテンションメータを回転させる減速ギアを介してサーボモータのポテンションメータ軸を回転させると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
(もっと読む)
羽ばたき航空機
【課題】ホバリング能力が高く、狭い場所であっても飛行することが可能な羽ばたき航空機の提供。
【解決手段】軸2aを中心として羽ばたき動作する複数の翼31L,31R,32L,32Rを備え、翼31L,31R,32L,32Rは、羽ばたき動作時に少なくとも3箇所でクラッピング動作を行う。これにより、翼面同士の間に挟み込まれた空気が翼面に平行な方向に少なくとも3箇所で噴出し、推力を発生する。これにより、本発明の羽ばたき航空機は、空中でホバリングを行うことができる。
(もっと読む)
揺動玩具
【課題】 電池等の電源を必要とせず、単純な機構の駆動手段を使用することによって、安価で、長時間の揺動運動が得られる揺動玩具を提供すること。
【解決手段】 上部に水溜部を備え、該水溜部の底部に孔が形成された台座と、該台座に揺動自在に設置され、下方にアームが延設され、そのアームの先端に落水受けを有する揺動体とを備え、前記水溜部に蓄えた水を前記孔から前記揺動体の前記落水受けに落下させ、それによって前記揺動体を揺動させるようにしたことを特徴とする。
(もっと読む)
脚式ロボット
【課題】股関節軸、膝関節及び足関節軸にある各プーリに弾性力を作用させ、各プーリを連結し、該プーリ同士の大きさを調節することによって、加速度センサ、角速度センサ、力センサ等のセンサを利用する制御系を使用することなく、脚の機構的構造自体によって安定性を実現することができ、センサや制御系の故障による影響を受けず、信頼性が高く、構造が簡素で、コストを低くすることができるようにする。
【解決手段】股関節軸、膝関節軸及び足関節軸の各々の変位角に比例する関節軸トルクを発生する弾性要素と、股関節軸において腰部リンクに固定されたプーリと膝関節軸において脛部リンクに固定されたプーリとに弾性力を作用する弾性要素と、膝関節軸において腿部リンクに固定された小径プーリと、足関節軸において足部リンクに固定された大径プーリと、小径プーリの円周部と大径プーリの円周部とを連結するワイヤとを有する。
(もっと読む)
ポップコーン製造玩具
【課題】ポップコーン製造玩具にコーンを投入する為の可動部を設け、該可動部を動作させ、コーンを加熱プレート上に落下させると共に、加熱プレートから熱せられた熱気が投入口の周辺に上昇しないようにすることのできるポップコーン製造玩具を提供する。
【解決手段】略円形の本体部及びこの本体部から水平に突出する前縁部を備えた台部と、この台部における本体部に載置固定される略半円球状のカバー部とで形成され、前記本体部の内部にヒータープレートや加熱プレートを有するポップコーン製造玩具であって、前記加熱プレートの上方に位置し、且つ、前記加熱プレート上にコーンを投入する為の可動部を備えた。
(もっと読む)
ホバリング中に受動的に安定なローターと飛行体
本発明は飛行体がホバリング中に受動的に安定であることを可能にするローターを公開する。本ローターはほぼ一定の幾何形状をもち、傾斜可能な形でそのローター軸に接合される。ローターブレードの外側部分は回転面に対して一定のピッチを有しており、ローターブレードの内側部分はローター軸に直角な基準面に対して一定のピッチを有する。  (もっと読む)
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】ロボット装置頭部に、低電力で上下回転及び左右回転機能とは別に上下運動又はそれを含む運動機能を実現し、感情表現を豊かにする。
【解決手段】ロボット装置の頭部1をモータH6の駆動力で上下回転可能にモータブラケットH3に取り付ける。モータブラケットH3は2つのポスト8で回転台U9に固定する。回転台U9は、クランプL21a、U21bからなる2組の伸縮支持構造体により、モータN16で水平方向の左右に回転される下側の回転台L10に支持される。伸縮支持構造体は圧縮されたスプリング14で上方に付勢される。頭部1の下部にはリブが取り付けられ、頭部1が所定の回転角度位置を越える角度範囲に上下回転した場合、リブがクランプL21aを押圧して伸縮支持構造体をスプリング14の付勢力に抗して縮め、回転台U9を下方に移動させる。頭部1は回転台U9と共に下方に移動し、所定の回転角度位置に戻れば上方に移動する。
(もっと読む)
プロペラ飛行玩具装置
【課題】ユーザーの好みや工夫が反映されオリジナリティのある飛行玩具を作ることができ、作成した飛行玩具を実際に飛行させることができるプロペラ飛行玩具装置を提供すること。
【解決手段】プロペラ飛行玩具装置は、プロペラ部材1と、該プロペラ部材1の回転軸14を軸支する軸支部16を設けた支持部材3と、該支持部材3に着脱可能な主翼部材2とを備えた飛行玩具体Aと、上記プロペラ部材1の回転軸14と同軸上に形成された係合軸13に係脱可能な駆動軸34と、該駆動軸34を回転させる回転駆動機構31と、駆動軸34を上記プロペラ部材1の係合軸13に係合させる際に上記主翼部材2の係合板26を保持する保持部35とを備えた発射装置Bとから構成した。
(もっと読む)
21 - 38 / 38
[ Back to top ]