
Fターム[2E052GB06]の内容
ウィング用動力操作機構 (24,196) | 検出対象 (1,752) | 通行体;接近体 (881) | 挟み込み、障害物 (577)
Fターム[2E052GB06]に分類される特許
101 - 120 / 577
車両用ドア開閉角度制御装置
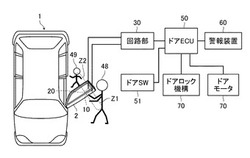
【課題】車両用ドアの外側および内側の障害物や人体の有無により車両用ドアの開閉角度を制御して、不用意な車両用ドアの他車等への接触を確実に防止する。
【解決手段】車両用ドア開閉角度制御装置は、車両1のサイドドア2の外側および内側に検知面が存するように配置された第1および第2静電容量センサ部10,20と、回路部30とを備える。各静電容量センサ部10,20は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、各静電容量センサ部10,20の表面上に検知範囲Z1,Z2を形成してサイドドア2の外側および内側の障害物や人体を検知する。ドアECU50は、回路部30からの出力によりサイドドア2の開閉角度や開閉動作を制御する。
(もっと読む)
挟み込み検知装置および挟み込み検知方法

【課題】ドア閉作動中のスライドドアの実際の位置とドア位置検出手段により検出されるドア位置情報のずれを補正し、誤作動の少ない高信頼な挟み込み検知装置および挟み込み検知方法を提供する。
【解決手段】挟み込み検知装置は、全閉位置と全開位置との間を自動的に移動するスライドドア12の位置情報を検出するドア位置検出手段332と、前記スライドドアの実際の位置を確認するドア位置確認手段31と、前記スライドドア12の位置情報に対応した挟み込み閾値を設定する閾値設定手段334と、障害物と該スライドドア12との間の距離に応じた検出信号を出力する距離検出手段32と、前記検出信号が、前記挟み込み閾値を超えたときに障害物の挟み込みを判定する挟み込み判定手段335とを備え、前記ドア位置検出手段332により検出される位置情報を、前記ドア位置確認手段31により確認された実際の位置に基づき補正する。
(もっと読む)
車両用開閉体の制御装置
【課題】悪路走行時に生じる外乱振動に対して確実な挟み込み判定を可能とする。
【解決手段】走行中を判定する車速判定部8dと、ウィンドウ9の移動量に対するモータ3の周期変化量となる周期変化率を算出する周期変化率算出部8bと、周期変化率に対する挟み込み判定用閾値を求める閾値マップ8eとを設け、走行中と判定された場合には判定部8cにより駆動回路4にモータ駆動速度を低速度に変更する信号が出力される。悪路走行中の閉動作時に外乱振動により、モータ周期が挟み込み時の周期変動と類似した場合にモータ周期の変化で挟み込みが生じたことを判定するものでは誤判定してしまうが、開閉体の移動量に対する周期の変化量(周期変化率)に基づき判定することから、悪路走行中の外乱振動に対してはモータ駆動速度を通常速度から変更して上記周期変化率を変えることで、誤判定を防止し得る。
(もっと読む)
車両用開閉体の制御装置
【課題】モータの電圧と角速度と角加速度とからモータの負荷を推定して挟み込み判定を行うものにおいて外乱振動に対して確実な挟み込み判定を可能とする。
【解決手段】電圧・角速度・角加速度から制御サイクル毎に負荷推定値を算出する負荷推定値算出部8bと、走行中を判定する車速判定部8eと、走行判定に応じた判定用回数を判定部8cに出力する判定用回数設定部8fとを設ける。判定部により、負荷推定値が閾値以上になったサイクル回数が、非走行時と判定された場合には第1の回数連続することにより、走行時と判定された場合には第1の回数より多い第2の回数連続することにより挟み込みが生じたと判定する。悪路走行時の外乱振動に対して挟み込みの誤判定をしてしまうことを防止することができる。
(もっと読む)
車両用開閉体の制御装置
【課題】モータの電圧と角速度と角加速度とからモータの負荷を推定して挟み込み判定を行うものにおいて振動外乱に対して確実かつ速やかな挟み込み判定を可能とする。
【解決手段】モータの回転速度と回転加速度と駆動電圧とから負荷推定値を算出し、起動終了までに負荷推定値が減衰している場合には振動外乱が無いものとして、第1の規定時間毎に記憶された各平均値を初期値に置き換え、直後の挟み込み判定では初期値に対して行うことからモータ起動特性による負荷変動の影響を排除した正確な挟み込み判定を行うことができる。負荷推定値が減衰していない場合には振動外乱の影響によるものと推定され、記憶されている各平均値を用いて挟み込み判定を行う。起動終了判定後さらに所定時間(第2の規定時間)を費やしてから挟み込み判定に移行するといった処理をする必要が無く、速やかな挟み込み判定処理を行うことができる。
(もっと読む)
車両用開閉体の制御装置
【課題】悪路走行時に生じる外乱振動に対して確実な挟み込み判定を可能とする。
【解決手段】走行中を判定する車速判定部8eと、走行/非走行の各判定信号に応じて異なる判定用基準値を設定して判定部8cに出力する判定用基準値設定部8fとを設け、走行中と判定された場合には負荷推定値に所定の振幅基準値を加算した値を判定用基準値として、負荷推定値が判定用基準値以上になったら挟み込みが生じたと判定する。加算された判定用基準値を用いることから、外乱振動による負荷推定値の増加部分が判定用基準値を即座に上回ることがなく、実際に挟み込みが生じて大きな増加が検出された場合に走行仲の判定用基準値以上となり得るため、悪路走行時の外乱振動に対する挟み込みの誤判定を防止し得る。また、走行中ではないと判定された場合には走行中の加算分が無い判定用基準値で判定することから、速やかな挟み込み判定を行うことができる。
(もっと読む)
車両用開閉体の制御装置
【課題】悪路走行時に生じる外乱振動に対して確実な挟み込み判定を可能とする。
【解決手段】車速判定部8eにて走行中であるか否かを判別し、その判別結果に応じて保持時間設定部8fにて走行中ではない場合には第1の時間を、走行中の場合には第1の時間より長い第2の時間を保持時間として設定する。判定用基準値設定部8gで、モータトルクに対する負荷減少量のピーク値を所定時間保持し、トルクに対する負荷増加量とピーク値とを比較して挟み込みが生じたか否かを判別する。走行中にはピーク値を走行中ではない場合よりも長く保持することから、悪路走行時に減衰が長引くような外乱振動が起きても対応できる。また、走行中ではないと判定された場合には短い第1の時間だけ負荷減衰量のピーク値を保持するため、速やかな挟み込み判定を実現し得る。
(もっと読む)
車両用開閉体制御装置
【課題】車両に振動が生じた場合の挟み込みの誤検知を抑止すること。
【解決手段】車両に設けられた開口部を開閉する車両用開閉体の位置を制御する車両用開閉体制御装置であって、電源から供給される電力によって車両用開閉体を駆動する電動モーターと、電動モーターの回転により生じる負荷を推定する推定部と、推定部によって推定される負荷に応じて係数を決定するフィルタ制御部と、フィルタ制御部によって決定された係数と、推定部によって以前に推定された負荷と、に基づいて、推定部によって新たに推定された負荷を補正する補正部と、予め設定された閾値と補正部によって補正された負荷とを比較することによって、車両用開閉体と開口部の縁部との間に物体が挟まれたか否か判定する判定部と、判定部によって物体が挟まれたと判定された場合に電動モーターの回転を停止させるモーター制御部と、を備える。
(もっと読む)
開閉体挟み込み検知装置
【課題】静電容量センサを用いた電動スライドドアの挟み込み検知装置であって、全閉付近での誤検知と、検知判定におけるレベル変化の増大による不具合が防止され、動作範囲全体にわたって検知感度を一定かつ高感度に設定することが容易な挟み込み検知装置を提供する。
【解決手段】センサ出力(LPF回路31の出力)に応じた学習データをスライドドアの動作位置毎に記憶する学習動作を実行可能なマイコンモジュール48と、スライドドアの通常動作時に、センサ出力から、前記学習データに応じた補正値(アッテネータ54の出力)を減算する演算増幅回路32と、この減算結果と規定のしきい値(オフセット調整抵抗34により生成される基準電圧)とを比較することにより検知判定を行う比較回路33とを設ける。
(もっと読む)
静電容量式障害物センサ及び当該障害物センサを備えた車両の開閉システム
【課題】開閉体を有する開口部における障害物の存在及び開閉体の位置を良好に検出可能な静電容量式障害物センサを提供する。
【解決手段】異なる周波数の交流信号を出力する複数の交流信号源15,16と、開閉体端部と枠体端部との何れか一方に設けられて開閉体端部と枠体端部との間に存在する障害物9との間の静電容量Csを検出する検出電極5と、開閉体端部及び枠体端部の他方に設けられた遮蔽電極7と、検出電極5及び遮蔽電極7に印加される交流成分f1,V1に基づいて、検出電極5と障害物9との間の静電容量Csを求め、障害物9が存在するか否かを判定すると共に、遮蔽電極7に印加されず検出電極5に印加される交流成分f2,V2に基づいて、検出電極5と遮蔽電極7との間の静電容量を求め、開閉体端部と枠体端部との距離を判定する制御部20とを有する。
(もっと読む)
自動ドア開閉装置及びトルクリミッタ
【課題】経年劣化の影響を低減しつつ、小型化を図る。
【解決手段】自動ドア開閉装置20は、駆動軸22bにトルクを発生可能なモータ22と、ドアに結合可能に構成される一方、駆動軸22bのトルクに応じてドアを開閉駆動する出力部26と、駆動軸22bから出力部26に伝達されるトルクを所定のトルクに制限するためのトルクリミッタ24とを備える。トルクリミッタ24は、駆動軸22bに結合される内筒部33と、出力部26の他方に結合される外筒部35と、を備え、内筒部33の外周面に凹部37が形成され、外筒部35の内周面から突出して凹部37に係合する凸部57aが設けられ、凸部57aは、所定のトルクを超えるトルクによって凹部37から外れる。
(もっと読む)
車両用開閉体制御装置
【課題】サンルーフなどの車両用開閉体において挟み込みを検知し停止処理を行った際に、挟み込まれた物体に生じる荷重の最大値のぶれを小さくすること。
【解決手段】車両に設けられた開口部を開閉する車両用開閉体を制御する車両用開閉体制御装置であって、車両用開閉体を駆動する電動モーターと、電動モーターの回転により生じる力を推定する推定部と、電動モーターの状態に基づいて閾値を決定する閾値決定部と、閾値決定部によって決定された閾値と推定部によって推定された力とを比較し、前記閾値よりも前記推定部によって推定された力が大きい場合に停止信号を出力する判定部と、判定部から停止信号が入力された場合に電動モーターの回転を停止させる制御部とを備える。
(もっと読む)
車両用開閉体制御装置
【課題】他の装置と共通の電源に接続された電動モーターによって車両用開閉体を駆動させる車両用開閉体制御装置において、他の装置の状態遷移に応じた電源電圧の変動を原因とする挟み込みの誤検知を抑止すること。
【解決手段】車両に設けられた開口部を開閉する車両用開閉体を制御する車両用開閉体制御装置であって、電源に接続されこの電源から供給される電力によって駆動する電動モーターと、電動モーターの回転により生じる力を推定する推定部と、電動モーターと共通の電源に接続された他の装置の状態に応じて閾値を決定する閾値決定部と、決定された閾値と推定部によって推定された力とを比較し、前記閾値よりも前記推定部によって推定された力が大きい場合に停止信号を出力する判定部と、判定部から停止信号が入力された場合に電動モーターの回転を停止させる制御部と、を備える。
(もっと読む)
開口覆材の開閉制御装置
【課題】モータの回転に応じたパルスを生成するセンサを使用するだけでも、高い位置検出精度を得ることができる開口覆材の開閉制御装置を提供する。
【解決手段】サンルーフを開閉制御するドライブユニット3は、サンルーフを駆動するモータ4と、制御装置10を備える。マイコン13は2個のホールIC11,12からモータ4の回転数に比例する位相の異なる2つのパルス信号を入力し、2つのパルス信号を基にモータ回転方向を考慮しながら位置カウンタ32にサンルーフ位置を計測する。リレー15,16が共にオフになる停止モードとなっても、モータ4の惰性回転の期間は位置カウンタ32の計数処理を継続する。またリレー15,16のオンとオフが逆に切り替わる反転モードとなっても、パルス信号に基づく判定により反転が検出されないうちは反転前の方向のまま位置カウンタ32の計数を継続する。
(もっと読む)
扉装置
【課題】安定した挟み込み検知ができる扉装置を提供する。
【解決手段】負荷検出手段85は、ステッピングモータ42で扉体を閉鎖するときの負荷を検出する。記憶部82は、ステッピングモータ42で扉体を閉鎖したときの負荷検出手段85で検出する負荷を基準データとして記憶する。挟み込み検知手段88は、ステッピングモータ42で扉体を閉鎖するときの負荷が、基準データを基準に設定する閾値を越えるか監視し、越えれば挟み込みと判断する。扉装置の設置後に、個々の扉体の閉鎖時の負荷のばらつきに個別に対応した基準データを取得し、挟み込み検知を安定させる。
(もっと読む)
車両用ドア制御装置
【課題】簡易な構成で、車体内の荷物が車体の開口部から落下することを防止できる車両用ドア制御装置を提供すること。
【解決手段】車両用ドア制御装置は、接触検出手段60、及び制限手段12を備える。接触検出手段60は、車体の開口部4を開閉するドア6への車体内の荷物20の接触を検出する。制限手段12は、接触検出手段60が接触を検出した場合、ドア6の開動作を制限する。
(もっと読む)
障害物検知システム及び車両装置
【課題】障害物に接触することなく車両本体と開閉ドアとの間の障害物を確実に検知すること。
【解決手段】開閉ドア側の第1の位置にレーダー装置20又はトランスポンダTの一方が設けられ、車両本体側の第2の位置にトランスポンダT又はレーダー装置20の他方が設けられている。送信回路21は所定の周波数の送信信号を無線送信し、トランスポンダTの送受信回路は無線送信された送信信号を受けて、同一周波数かつ同一位相の返信信号を送り返す。受信回路21は返信信号を受信し、測定部22は送信信号及び返信信号の位相情報から距離情報を測定する。メモリ23には開閉ドアが全開状態でのトランスポンダTとレーダー装置20との距離に対応した距離情報が格納され、障害物検知部24は、測定部22が測定した距離情報とメモリ23に格納された距離情報とを比較して、これら距離情報が不一致の場合には障害物有りと判定する。
(もっと読む)
開閉体の制御装置
【課題】バックドアを開放して荷物の積み降ろしを行う際のバックドアの開放制御を合理的に行う。
【解決手段】バックドア10を駆動力により開放作動させる制御を行う制御ユニットBを備えた。この制御ユニットBは、バックドア10がノックされたことを判別した際に、バックドア10の開放作動を開始し、バックドア10に取り付けたカメラ22で撮影した画像情報に人物が存在することを継続的に判別する限り開放作動を継続する。バックドア10の開放作動によりカメラ22の撮影領域から外方に人物が移動し、人物の存在が判別できなくなった時点で開放作動を停止する。
(もっと読む)
開閉体制御装置
【課題】傾斜地においても、開閉体の閉動作における挟み込み検出を適切に行う開閉体制御装置を提供することにある。
【解決手段】開閉体制御装置1は、負荷処理部11により開閉体を駆動するモータ3の負荷を算出し、挟込処理部12が、負荷処理部11が算出した負荷に応じて、異なる閾値を記憶している通常負荷閾値マップ部123と傾斜時負荷閾値マップ部124とのいずれか一方を選択して、選択したマップ部に記憶されている閾値により開閉体の閉動作における挟み込み判定を行う。
(もっと読む)
セミオート回転ドアにおける駆動装置
【課題】セミオート回転ドアの駆動装置において、アシストトルクをドア体の回転抵抗の変化に自動的に対応できるように構成する。
【解決手段】主制御部8には、通行者が回転ドアに近付くことの検出に伴い始動時制御手段8aを行い、ドア体4が回転始動した後、ドア体4の回転速度を検出し、該回転速度に対応する定速回転制御手段8bを行う構成とするとともに、主制御部8に、理想速度で回転するときの電動モータMのトルク値を記録する定速トルク検出手段8eと、該定速トルク検出手段8eによる検出値RCに基づいて次回の回転始動時の第一、第二アシストトルクR1、R2を設定する始動時トルク設定手段8fとを設ける構成とする。
(もっと読む)
101 - 120 / 577
[ Back to top ]