
Fターム[2F051AA24]の内容
特定の目的に適した力の測定 (5,882) | 用途 (1,694) | 電気部品、電気機器 (157) | 電動機 (30)
Fターム[2F051AA24]に分類される特許
1 - 20 / 30
トルク測定装置
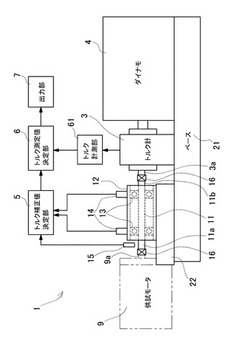
【課題】より高精度なトルク測定を行うことができるトルク測定装置を提供する。
【解決手段】転がり軸受13、13により支承された中間軸11を介して供試モータ9の回転出力軸9aとトルク検出器3の入力軸3aとを接続して、トルク検出器3からの検出値を基にして供試モータ9の出力トルクを計測するトルク測定装置1において、転がり軸受13、13の振動を検知する加速度検出部14、14と、加速度検出部14、14から得られる振動の検出信号に基づいてトルク補正値を決定するトルク補正値決定部5とを備え、トルク補正値決定部5より得られるトルク補正値に基づいて測定トルクの補正を行うように構成した。
(もっと読む)
計測装置、モータ装置、及びロボット装置

【課題】出力されるトルクを計測する。
【解決手段】計測装置は、回転子SFの周面の少なくとも一部に掛けられる伝達部BTを用いて駆動動作及び復帰動作を行う駆動部30によって駆動される回転子SFに加えられるトルクを計測する計測部、を備える。
(もっと読む)
モータ制御装置
【課題】 脱調を回避しつつモータを制御可能なモータ制御装置を提供すること。
【解決手段】 ブラシレスモータに所定の通電パターンにより通電することで駆動するモータ制御手段を備えたモータ制御装置において、前記モータの実トルクを検出するトルク検出手段と、前記モータの電流値に基づいて推定トルクを検出するトルク推定手段と、前記実トルクと前記推定トルクとの差分に基づいて脱調傾向か否かを判断し、脱調傾向と判断したときは、脱調防止対策制御を実行する脱調防止対策制御手段と、を備えた。
(もっと読む)
コギングトルク測定装置および電動パワーステアリング装置
【課題】コギングトルク測定時の作業性がよく測定精度を低下させないコギングトルク測定装置および電動パワーステアリング装置を提供する。
【解決手段】被測定モータ側嵌合部10の爪部に当接する駆動モータ側嵌合部11の爪部の両面に、柔らかい緩衝部材12を貼り付けることにより、駆動モータからの振動を伝え難くし、互いの爪同士の共振を抑えることができ、精度の高いコギングトルクの測定ができる。さらに、嵌合部の爪同士の間に隙間14を設けることにより、測定時、容易に被測定モータ側嵌合部10を駆動モータ側嵌合部11に挿入できるため、爪の位相合わせが不要となり作業工数が削減できる。
(もっと読む)
コギングトルクの検査方法及びコギングトルクの検査装置
【課題】検査に要する時間を短縮してモータの生産性の向上を図ることができるコギングトルクの検査方法を提供する。
【解決手段】環状に配置した複数の分割コア11の内周側に芯金を、外周側に筒状の加圧治具31をそれぞれ配置した後、加圧治具31にて各分割コア11に径方向内側への押圧力を付与することで、周方向に隣り合う分割コア11同士を圧着させるとともに、各分割コア11と加圧治具31とを径方向に圧着させる。次に、環状の各分割コア11を加圧治具31内に保持させた状態のまま該分割コア11から芯金を取り除き、その後、加圧治具31内に保持された環状の各分割コア11と、該分割コア11の内周側に回転可能に設けられた基準ロータ41とからなる検査用擬似モータ50を用いてコギングトルクを測定する。
(もっと読む)
電気機械装置の特性測定装置及び測定方法
【課題】電気機械装置のトルクやその他の特性を簡便に測定する。
【解決手段】電動モーターの特性測定装置であって、予め特性が既知である負荷モーターと、前記負荷モーターと被測定モーターのローターとを接続するカップリングと、前記被測定モーターに負荷トルクを与えるために、前記負荷モーターの動作を制御する負荷モーター制御部と、前記負荷モーターの回転数と、前記負荷モーターに流れる電流とから、前記負荷モーターが前記被測定モーターに与える負荷トルクを算出する負荷トルク算出部と、前記負荷トルクが前記負荷モーターに与えられたときの前記被測定モーターの電流と回転数とを測定する測定部と、前記負荷トルクと被測定モーターの電流と回転数とを用いて前記被測定モーターのトルク−回転数特性と、トルク−電流特性と、を取得する特性取得部と、を備える。
(もっと読む)
測定装置、及び測定方法
【課題】ロードセル等の測定器具を設けることなく、測定対象に与える荷重を測定できる測定装置を提供する。
【解決手段】測定装置は、リニアモータと、リニアモータを駆動してリニアモータが有する可動子を移動させることにより測定対象に荷重を与える駆動部と、前記可動子を相対移動させる際に前記リニアモータに流れる電流値と、前記リニアモータの推力定数とを乗じて前記可動子が前記測定対象に与える荷重を算出する荷重測定部とを具備している。
(もっと読む)
トルク検出装置
【課題】スイッチの動作位置の設定や調整を容易に行うことができるトルク検出装置を提供すること。
【解決手段】負荷トルクに応じて自身の軸方向に発生する分力により軸方向に沿って移動可能なモータ軸10と、モータ軸10の軸方向の移動量が予め決められた閾値を超える場合に動作して信号を発生するスイッチ26a,26bとを備えたトルク検出装置において、モータ軸10は、モータフレーム12を貫通して外部に突出する態様で延在し、スイッチ26a,26bは、モータフレーム12の外部に配設され、かつモータフレーム12から突出するモータ軸10の回転板22,24におけるフランジ21,23に当接されることにより動作するものである。
(もっと読む)
ブラシ押圧力測定装置
【課題】回転子にブラシが接触するときの押圧力を正確に測定する。
【解決手段】ブラシ押圧力測定装置1は、引張力が作用するときに軸方向に沿って湾曲することにより発生する第1ひずみを検出する第1ひずみ検出部22aが形成された第1板ばね22と、第1板ばね22の外側に連結されて引張力が作用するときに周方向に沿って湾曲することにより発生する第2ひずみを検出する第2ひずみ検出部24aが形成された第2板ばね24と、第2板ばね24に取り付けられて引張力によりブラシ12および外周表面51の接触が解除されたときに第2板ばね24に生じるひずみに基づいて引張力を計測可能な荷重計測部24bと、を有する。
(もっと読む)
電動機のトルク推定システム及びその推定方法
【課題】本発明の課題は、機械システム内で発生する各種トルクを高精度に推定するトルク推定システム及びその方法を提供することにある。
【解決手段】機械システム内に設置した電動機用センサ,機構用センサおよびその計測データを分析するモデル推定器により達成される。すなわち、電動機用センサにより角速度などの電動機の状態量、機構用センサにより荷重などの機構の状態量を計測し、そのデータに基づいて多変量解析やシステム同定などの手法で機械システムのモデルを推定することにより、機械システム内で発生する各種トルクを推定することができる。
(もっと読む)
トルク測定装置、トルク測定方法、イナーシャ測定装置、イナーシャ測定方法、及び、プログラム
【課題】手軽に、高い精度で、電動機の出力軸に接続され、イナーシャが未知の負荷回転体にかかるトルクを測定する装置を提供する。
【解決手段】トルク測定装置200は、第1加速データ20(第1の情報)を取得する第1取得部10(第1の取得手段)と、サーボモータ1の出力軸1aに対して所定のイナーシャIPを付加した場合における、第2加速データ21(第2の情報)を取得する第2取得部11(第2の取得手段)と、サーボモータ1の出力軸1aに対して付加された前記所定のイナーシャIPを取得する第3取得部12(第3の取得手段)と、第1加速データ20と、第2加速データ21と、前記所定のイナーシャIPと、に基づいて、回転体2にかかるトルク(加速トルクTA)を算出するトルク算出部13(トルク算出手段)と、を備える。
(もっと読む)
電動機の特性を算出する方法
【課題】従来とは異なる方法で、電動機の特性を算出することのできる技術を提供する。
【解決手段】電動機の特性を算出する方法は、電動機が理論上発生させることのできるトルクである真トルクを基準として、電動機の特性を算出する工程を備える。真トルクは、電動機が外部負荷に対して発生させる外部トルクと、電動機が内部負荷に対して発生させる内部トルクと、を合わせたトルクである。
(もっと読む)
軸受アダプタ
【課題】モータの高速回転駆動時における振動を低減でき、トルクメータの精度も向上できるようにする。
【解決手段】モータシャフト22を回転駆動する駆動部を有するモータ2と、モータシャフト22のトルクを計測するトルクメータ4との間に軸受アダプタ3を介在させる構成として、この軸受アダプタ3に、モータシャフト22と同期して回転するシャフト32と、シャフト32とモータシャフト22とを接続する入力側アダプタ33と、シャフト32の回転をトルクメータ4に伝達する出力側アダプタ34と、シャフト32を回転可能に支持する軸受部361とを有する構成とした。
(もっと読む)
コギングトルクの測定方法及びコギングトルク測定装置
【課題】早期工程における磁気バランスの確認を可能にしてモータ生産性の向上を図ることができるコギングトルクの測定方法を提供すること。
【解決手段】回転軸3の先端に試験体となる永久磁石型ロータ15を連結し、界磁装置13の内側に配置することで、完成品と同様の構成を有する擬似モータ16を形成する。次に、界磁装置13の形成する磁界が非回転となるように、同界磁装置13に通電しつつ、駆動モータ4により回転軸3に連結された永久磁石型ロータ15を回転駆動する。そして、その永久磁石型ロータ15が回転する際にトルクセンサ2が出力するトルク検出信号Stに示されるトルク特性(トルク波形)Tdを解析することによりコギングトルクを測定する。
(もっと読む)
ターボ機械システムの光ファイバ多パラメータ検出システムおよび方法
【課題】ターボ機械システムの回転シャフトからの静的および動的なトルクと、線形および非線形の振動とを測定する高信頼性の手段を提供する。
【解決手段】多分岐ファイバ束に基づいた光スプリッタ(22)は複数の光ファイバ束により、光を少なくとも1つのターボ機械システムシャフト(24)の表面まで伝送する。複数の光ファイバ束は一緒に、少なくとも1つのシャフト(24)の端部間にほぼ軸方向に配列されている。システムは、シャフト表面から反射信号を受け取り、動的反射光信号を生成するように構成された、感光検出器(34)のアレイまで送出するための、耐熱2分岐ファイバ束に基づいた反射プローブ(26、28、30、32)のアレイを含む。検出機構(36)は、動的反射光信号のサインに応じて、ターボ機械システムシャフトのトルクまたは振動を時間領域および周波数領域の信号処理に基づいて算出する。
(もっと読む)
リニアモータの推力リップル測定装置およびその測定方法とモータ制御装置
【課題】 リニアモータの位置および推力指令に複雑な関数で依存する推力リップルを正確に測定することができ、モータ制御装置に適用する場合においても大きな容量のメモリを必要としないリニアモータの推力リップル測定装置およびその測定方法を提供する。
【解決手段】 推力指令F*およびリニアモータ4の位置Xに基づいてリニアモータ4の推力リップルFrを測定する推力リップル測定部20を備えたリニアモータの推力リップル測定装置において、推力リップル測定部20は、リニアモータ4の位置Xに基づいてフーリエ基本位相θを算出する位相計算器22と、フーリエ基本位相θおよび推力指令F*に基づいてリップルパラメータを決定するリップルパラメータ決定器21とで構成する。
(もっと読む)
触覚の解析方法および触覚の解析装置
【課題】環境との接触動作により生じた力の情報から、接触環境の材質的または品質的な特徴を直感的且つ定量的に把握して、これを抽出することが可能な触覚の解析方法および触覚の解析装置を提供する。
【解決手段】環境Eとの接触動作により生じた時系列な反作用力の触覚情報を入力手段2により取得し、この入力手段2で取得した触覚情報を、処理手段3により時間領域で可視化できるように解析処理し、この解析処理結果から抽出手段24が環境Eの材質または品質を抽出する。また、解析処理結果と環境Eの材質とを関連付けた関連付けデータを、環境Eの材質毎に記憶手段4に記憶させる。
(もっと読む)
モータトルク測定方法及びモータトルク測定装置
【課題】直流モータのトルクを安価な構成で高速に測定することが可能なモータトルク測定方法及びモータトルク測定装置を提供する。
【解決手段】電源3によりモータMに起動電圧を印加して起動し、起動後からモータMが無負荷で定常回転するまでの間の起動電流波形を測定する。次に、モータMが無負荷で定常回転している間の無負荷電流波形を測定する。また、起動電圧の印加を停止した直後にモータMから発生する誘起電圧波形を測定する。そして、これらの波形に基づいてモータMのトルクを演算する。トルクの演算では、起動電流波形のうち起動電流のピーク値以降の減衰部の電流波形、無負荷電流波形及び誘起電圧波形に基づいてモータMの角速度−時間特性を算出し、減衰部の電流波形から機械的時定数τを算出してロータの慣性モーメントJを算出し、角速度−時間特性と慣性モーメントJに基づいてトルク−時間特性を算出する。
(もっと読む)
IPMモータのためのトルク推定器
【課題】内部永久磁石を備えるモータのトルクの推定方法を提供する。
【解決手段】内部永久磁石を備えるモータに結合された電流及び電圧を(物理的センサ又は仮想的なソフトウェア代替手段のいずれかを使用して)測定し、測定された前記電流及び前記電圧に応答して無効電力を決定する、各工程110、120を備える。更に、前記内部永久磁石モータの軸に直交する第1の磁束を推定し、前記内部永久磁石モータの軸に整列する第2の磁束を推定する、各工程130、140を備える。加えて、測定された前記電流、並びに、前記第1及び第2の磁束に応答してトルクを推定する工程150を備える。
(もっと読む)
分割型プーリー、及びそれを用いたモーターのトルク測定装置
【課題】取付け対象の軸が短い場合であっても確実に固定することが可能な分割型プーリー、及びそれを用いたモーターのトルク測定装置を提供する。
【解決手段】プーリー外枠体21、スペーサー22、ネジ23で分割型プーリーを構成する。プーリー外枠体21は、径方向へ均等に分割された2つの分割体21a、21bが相互に合体することで構成されている。スペーサー22は円柱状を成し、その上端部及び下端部には径方向外側へ迫り出した鍔部22a、22bが一体的に形成されている。鍔部22a、22bは、プーリー外枠体21の上端面と、内壁の一部に設けられた段差部28とにそれぞれ当接し、それにより鍔部22a、22bの間にプーリー外枠体21の厚み方向の一部が挟持された状態となっている。プーリー外枠体21をネジ23により締結する際には、プーリー外枠体21内周面とスペーサー22外周面との間に設けられた隙間27が締め代として作用する。
(もっと読む)
1 - 20 / 30
[ Back to top ]