
Fターム[2F062EE09]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 非接触測定 (67)
Fターム[2F062EE09]に分類される特許
1 - 20 / 67
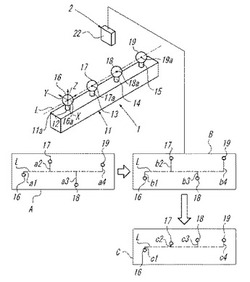
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
多関節型座標測定装置

【課題】多関節型測定アームに測定誤差要因となるストレスがかからない測定姿勢を維持させる。
【解決手段】測定アームの各関節の角度に基づき、1)測定アームの第1リンクと第2リンクがなす角度が所定値を超えて180°に近づいた、2)手首関節からアーム支点への距離が所定値を超えて遠くなった、3)バランサーにより発生される力に基づいて定められる所定範囲を超えて第2リンクが曲げられた、のいずれかの条件が成立した場合、ユーザへの警告を行ない、専用プロセッサからの空間座標値の出力を中止する。
(もっと読む)
反り検査装置および反り検査方法
【課題】平板状に形成される検査対象の反り方向を簡易な構成にて検査し得る反り検査装置および反り検査方法を提供を提供する。
【解決手段】アクチュエータ12により平面部11a上に載置された平板状のセラミック基板20の外縁部22が押圧されて、フォトセンサ13により上記押圧力の解除後におけるセラミック基板20の回転が検知される場合に、当該セラミック基板20の反り方向が、外縁部22に対して中央部21が平面部11a側に凸となる反り方向(下側に凸となる反り方向)であることが検知される。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
表面性状測定機
【課題】測定時間の短縮が図れる表面性状測定機を提供する。
【解決手段】被測定物Wを載置する回転テーブル20と、被測定物の表面性状に応じた信号を発する検出手段30と、回転テーブルおよび検出手段を相対移動させる検出器駆動機構40と、検出手段からの信号を取り込み、この取り込んだ信号を処理して被測定物の形状や表面粗さなどの表面性状を求める処理装置60とを備える。検出手段は、複数の検出器31,32を含んで構成される。処理装置60は、複数の検出器31,32からの信号を順番に取り込んで処理する。
(もっと読む)
形状測定方法
【課題】周期的な複数の設計段差を有する設計形状に基づいて形成された被測定面の測定データと設計形状とのフィッティングを高精度に行う。
【解決手段】被測定面の測定点列から段差領域と段差の高さとを特定する(S3)。そして、点列に対する段差高さの移動を行う(S4)。即ち、段差をなくすような処理を行い、段差のないフィッティング対象データを得る(S5)。一方、設計形状から複数の設計段差のない参照形状を取得する(S6、7)。そして、フィッティング対象データと参照形状とを、例えば最小二乗法などによりフィッティングする(S8)。フィッティング対象データと参照形状とから段差形状成分を除去しているため、フィッティングを高精度に行える。
(もっと読む)
離隔距離確認器具
【課題】地上巡視に際して携帯するのに障害とならない程度にコンパクト化することができ、一旦設置した場合には数年間は利用することができるばかりでなく、樹木が密集する等の目視確認しにくい環境であっても容易に確認器具の所在を把握して、電線と他の樹木との間の離隔距離を確認する。
【解決手段】内外径が異なる中空、且つ絶縁性の棒状部材を入れ子式に伸縮自在とした竿2と、最大外径の棒状部材を樹木の幹に固定するための固定手段10と、最小外径の棒状部材の先端部に設けられた目印部材20と、最小外径の棒状部材の先部に一端を支持された絶縁紐30と、絶縁紐他端に固定されて空気よりも比重の小さい気体を封入したバルーン35と、を備え、各棒状部材は、竿の全長を任意の長さに固定できるように構成されている。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
平衡度測定装置及び平衡度測定方法
【課題】工具の平衡度を、該工具の先端の形状や温度等に依存せず、短時間で精度良く測定することができる平衡度測定装置及び平衡度測定方法を提供する。
【解決手段】工具Tが離間可能に当接される測定面11を設けた測定部10と、測定部10の測定面11に対向した付勢面11bに当接し、測定部10を付勢する付勢部21と、測定部10の付勢面11bに当接した状態で設けられ、工具Tに当接された測定部10が付勢されている方向と反対の方向に移動した場合に、測定部10の位置を検出する検出部31と、測定部10の測定面11の側に設けられ、付勢部21に付勢された測定部10を離間可能に係留して停止させる係留部40と、検出部31と電気的に接続され、検出部31が検出した測定部10の位置の変化量又は位置の絶対値を報知する報知部とを有する。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
測定装置
【課題】高い測定精度を有し、容易に仕上げできる測定装置を創作すること。
【解決手段】この発明は、工作機械、測定機械或いはロボットの運動軸線の立体的移動を検出する測定装置に関する。測定装置は、複数の長さ測定システム(2、3、4)が配置されている保持体(1)から成り、異なった立体的方向において測定球(5)に対する間隔を測定する。保持体(5)が球状形状を有し、複数の長さ測定システム(2、3、4)が保持体(5)の球状形状の中心点(M)の方向に測定するように整合されている。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
光学ひずみゲージ、光学的ひずみ測定装置及び光学的ひずみ測定方法
【課題】使用環境が制限されず、測定原理が簡単で、且つ、より高い感度及び精度でひずみを測定できる、光学ひずみゲージ、光学的ひずみ測定装置及び光学的ひずみ測定方法を提供すること。
【解決手段】測定対象物1に取り付けられ、光を反射可能であり且つ測定対象物1のひずみ変形に伴って角度が変化する複数の反射面5を備えるように、光学ひずみゲージ10を構成した。また、光学的ひずみ測定装置100に当該光学ひずみゲージ10を備えた。
(もっと読む)
仮想表面によって測定過程を制御する方法
本発明は、測定対象(12)を計測する座標測定機(46)の測定過程を制御する方法(10)であって、前記座標測定機(46)が制御装置(64)と探触ピン(18)を備えたプローブ(60)とを有し、前記探触ピン(18)と前記測定対象(12)の表面(14)との間の相対運動が前記制御装置(64)によって制御されるものに関する。さらに、前記表面(14)は測定対象表面(13)に一致した少なくとも1つの実際部分(24)と少なくとも1つの仮想部分(26)とを有する。本発明はさらに、当該座標測定機とコンピュータプログラムとに関する。
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 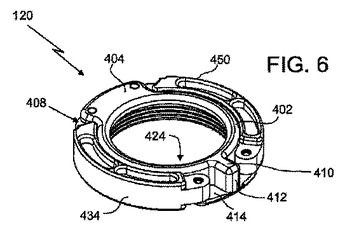 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 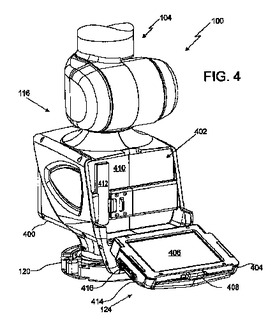 (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 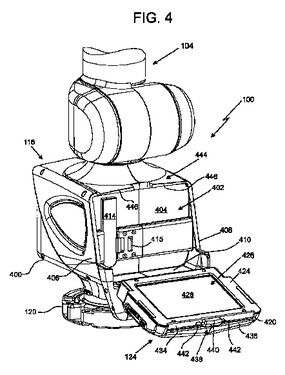 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 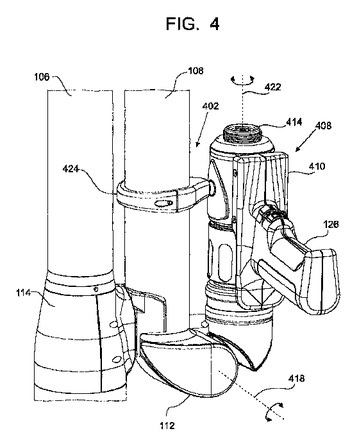 (もっと読む)
(もっと読む)
1 - 20 / 67
[ Back to top ]