
Fターム[2F063KA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器から得られる信号の形式 (479) | 線形信号 (32)
Fターム[2F063KA05]に分類される特許
1 - 20 / 32
光偏向装置
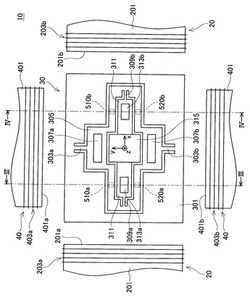
【課題】2軸に傾動可能な光偏向装置において、それぞれの軸の周りの傾動角度を正確に検出することが可能が技術を提供する。
【解決手段】本出願の光偏向装置は、基板に対して第1傾動軸および第2傾動軸周りに傾動可能な傾動部と、前記傾動部に固定されているミラーと、前記傾動部を前記基板に対して第1傾動軸および第2傾動軸周りに傾動させるアクチュエータを備えている。その光偏向装置は、前記傾動部に固定されている磁束源と、前記基板に固定されており、前記磁束源が発生させる磁束密度を検出する第1、第2、第3および第4磁気センサを備えている。その光偏向装置では、前記第1、第2、第3および第4磁気センサが、傾動部の第1傾動軸周りの傾動および第2傾動軸周りの傾動に対して、それぞれ異なる増減特性となる位置関係で配置されている。
(もっと読む)
回転角度センサのフェール検知装置

【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
チェンジレバーの位置検出装置、これを備えたチェンジレバーユニット、およびチェンジレバーの位置検出方法
【課題】より簡単の構造でチェンジレバーの位置を精度よく検出する。
【解決手段】チェンジレバーのシフト方向の3つのレンジとチェンジレバーのセレクト方向の3つのレンジとにおけるマグネット2の磁気に対応して出力するホール素子3の電気的シフト位置信号値および電気的セレクト位置信号値をセンサ特性値としてホール素子のメモリに記録する。各レンジ間においては、ホール素子3は、隣接する電気的シフト位置信号値どうしを結ぶシフト側仮想直線および隣接する電気的セレクト位置信号値どうしを結ぶセレクト側仮想直線を用いてセンサ特性値として、ホール素子3の位置に対応した電気的シフト位置信号値および電気的セレクト位置信号値を補完出力する。これにより、種々のばらつきが生じていても、チェンジレバーの位置を精度よく検出可能となる。
(もっと読む)
センサ出力補正回路及び補正方法
【課題】固体高分子電解質を用いた曲率センサに付与される曲率と曲率センサからの出力電圧との間の線形性を保持すること。
【解決手段】一対の電極と、その間に形成された固体高分子電解質層と、を備えたセンサ200が、付与された曲率に応じて出力する出力電圧を補正する補正回路100であって、出力電圧の変化量を監視する監視回路102と、変化量が所定の基準値よりも小さい場合、センサが静止状態であると判定し、目標電圧を設定する状態判定回路103と、静止状態であると判定された場合、センサ200に対し出力電圧が目標電圧に近づく方向に出力電圧と目標電圧とのずれに応じた量の電荷を注入する補正電流生成回路104と、を備えるセンサ出力補正回路。
(もっと読む)
位置センサ、位置制御システム、及び内視鏡装置
【課題】変形し難く、取り扱いが容易な微小静電容量型位置センサ、該位置センサを使用したアクチュエータ制御システム、及び内視鏡を提供する。
【解決手段】本発明の静電容量型位置センサは、筒状の第1電極と、該第1電極と同軸に固定された筒状又は柱状の第2電極とを備えている。第2電極の少なくとも一部は第1電極と接触せずに第1電極の筒内に挿抜可能である。また、測定点の位置に応じた長さだけ第2電極が第1電極の筒内に差し込まれて、測定点の位置に応じた静電容量を有するコンデンサを形成する。
(もっと読む)
差動ペアを備えた静電容量感知システム
2つ以上の静電容量センサ(30a、30b)と、静電容量センサにエネルギを与える1つ以上のAC電力源(306a、306b)と、静電容量センサからの信号を処理する信号処理回路とを具備する、静電容量感知システム。センサは、ペアで配置されている。1つ以上のAC電力源は、センサのペアのうちの第1のセンサに、センサのペアのうちの第2のセンサの電流又は電圧に対して位相が180度ずれている交流電流(307)又は電圧で、エネルギを与えるように構成されている。センサのペアは、1つの測定距離値に対する測定ユニットを備えている。信号処理回路は、ペアのうちの各センサから出力信号を受信し、ペアのセンサとターゲット(9)との間の平均の距離に関係する測定値を生成する。 (もっと読む)
位置検出装置
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
振動型駆動装置
【課題】移動体の位置を検出でき、配線が簡単で断線し難い振動型駆動装置を提供する。
【解決手段】振動型駆動装置1は、印加された電圧に応じて機械的変位を生じる電気機械変換素子3と、電気機械変換素子3によって軸方向に移動可能に支持され、表面に、電気機械変換素子3の外部電極6に片側が接続された軸方向に延伸する2つの抵抗体8を備える駆動軸4と、駆動軸4に摺動可能に係合し、2つの抵抗体8に接触し、抵抗体8の接触した点を電気的に接続する移動体5と、電気機械変換素子3に周期的な駆動電圧を印加する駆動回路と、外部電極6間の電気抵抗を検出する検出回路とを有する。
(もっと読む)
近接検出装置
【目的】 複数の磁気センサを用いず、接続部材の回転により生じる誤検出を防止する近接検出装置を提供する。
【構成】 中継パイプ20がガス栓10に接続された状態で周方向に300度回転可能であり且つソケット30がパイプ20に接続されたか否かを検出する近接検出装置であって、ソケット30に設けられ且つソケット30がパイプ20に接続された接続状態でパイプ20の回転と共に旋回可能なマグネット500と、栓10に設けられ且つ前記接続状態でN極510に対向する内側ヨーク200aと、栓10に設けられ且つ前記接続状態でS極520に対向する外側ヨーク200bと、ヨーク200a、200bの間に配置される磁気センサ300とを備える。N極510が旋回の内側、S極520が旋回の外側に向いている。ヨーク200a、200bがN極510、S極520の旋回経路と略同じ円弧状である。
(もっと読む)
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、軸方向のストロークによって異なる形状が軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、磁気スケール60の形状によって出力が変化するMRセンサ50を備える。
(もっと読む)
位置検出装置及びそれを備えたベルト式無段変速機
【課題】検出データの処理の容易化及び位置検出精度の向上を図ることができる位置検出センサの提供。
【解決手段】回転軸方向へ直線移動する可動プーリ半体18の回転外周面18aに設けた被検出面51と、被検出面51に対向して配置されたホール素子53及びそれを囲む略コ字型の磁石54からなるセンサ本体52とを備え、可動プーリ半体18の移動に伴いセンサ本体52と被検出面51の距離が変化することで、ホール素子53の出力が変化して可動プーリ半体18の位置を検出できる非接触式の位置検出センサ50であって、可動プーリ半体18の被検出面51は、可動プーリ半体18の移動方向に沿って傾きが変化するように湾曲しつつ傾斜する湾曲傾斜面形状に形成されている。ホール素子53の出力分布が線形分布もしくは線形に近似した分布となるので、データ処理の容易化及び位置検出精度の向上が図れる。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
浮上体のセンシング方法
【課題】センサ不使用による低コスト化と省スペース化が図れると共に、浮上体位置の検知精度を向上できる浮上体のセンシング方法を提供する。
【解決手段】磁気浮上している浮上体10の周囲に配置され、それぞれコア11、12とコア11、12に巻回されたコイル13、14とを有する複数の電磁石15、16を用いて浮上体10をセンシングする方法であって、各コイル13、14に共振回路17、18を形成するコンデンサ19、20をそれぞれ直列又は並列に設け、各コイル13、14間の電圧から浮上体10の位置を検出する。
(もっと読む)
アクセレレーターポジションセンサー
【課題】別の保証コイルを具備せず、受信コイルだけで保証信号を得ることができるアクセレレーターポジションセンサーを提供する。
【解決手段】本発明によるアクセレレーターポジションセンサーは、オシレーターに繋がれて磁場を発生する送信コイルと、前記送信コイルから所定の間隔をおいて設置され前記送信コイルで発生する磁場を制御するカプラーと、前記送信コイルと前記カプラーの間に設置され前記送信コイルで発生する磁場を受信して交流周波数を発生する受信コイルと、前記受信コイルと繋がれて、前記受信コイルから得られる交流周波数を利用して前記カプラーの回転情報を演算してアクセル・ペダルの変位の値を出力する信号処理部と、を備えることを特徴とする。
(もっと読む)
多層配線板の孔あけ加工装置
【課題】導体で形成された配線パターンが積層されてなる多層配線板において、前記多層配線板に精度孔あけ加工を行う。
【解決手段】多層配線板の微小領域に交番磁場を印加し計測対象パターン2で誘起された起電力の電圧値を検出する計測部5と、多層配線板1に孔あけ加工を行う孔あけ加工部6と、孔あけ加工部6を制御する制御部Contを備え、制御部Contが電圧値及び位置データより取得した多層配線板1の位置情報をもとに、孔あけ位置を決定し、孔あけ加工部6を駆動して多層配線板1に孔あけ加工を行う多層配線板の孔あけ加工装置A。
(もっと読む)
ALCパネルの主筋かぶり厚検査方法
【課題】ALCパネルの製造工程において、内部に埋設される主筋から両面までの主筋かぶり厚を、高速かつ安価に、過検出とならないように測定する方法を提供する。
【解決手段】渦電流式磁気センサ(7)を使用し、該センサ(7)を、水平方向に搬送されるALCパネル(1)の腹面から一定距離(L)を保持し、かつ、一定速度(v1)で、ALCパネル(1)の搬送方向に対して垂直方向に往復動させ、センサ(7)の出力値をアナログ出力させ、センサ(7)が主筋(2)の上を通過する際の測定信号のピーク値(vm)と、前記速度(v1)と、センサ(7)と主筋(2)との距離の関係式f(ピーク値、速度)を予め求めておき、主筋のかぶり厚(t)を、t=f(vm、v1)−Lにより算出し、得られたデータをピークカット処理ないしは移動平均処理することにより、補強鉄筋徒の交差の影響を排除して、ALCパネルの主筋かぶり厚を測定する。
(もっと読む)
移動センサ
【課題】 磁気抵抗効果素子を用いた非接触式の移動センサに係り、特に、位置検出のリニアリティ(直線性)を向上させることが可能な移動センサを提供することを目的としている。
【解決手段】 第1の磁石4と第2の磁石5とをX磁状に交差させ、前記磁石4,5間の空間内を、磁気抵抗効果素子(GMR素子)15を直線移動させる。前記磁石4,5間には、左側端部4b,5bから右側端部4c,5cにかけて外部磁界が回転変位した回転磁場領域が形成され、前記磁気抵抗効果素子15は前記回転磁場領域内を通るように移動支持されているので、移動に伴って、前記磁気抵抗効果素子15のフリー磁性層の磁化方向が漸次的に変動する。よって、位置検出のリニアリティ(直線性)を向上させることができる。
(もっと読む)
インナジンバルの回転角度検出方法及び装置
【課題】本発明は、磁石と磁気ヘッドの組合せからなる簡単なリイアセンサを用いて、プラスマイナス3度以内のインナジンバルの正逆回転角度を検出することを目的とする。
【解決手段】本発明によるインナジンバルの回転角度検出方法及び装置は、インナジンバル(1)の回転軸(3)に設けられた磁気ヘッド(4)と、前記インナジンバル(1)の回転軸(3)を支持する支持側(5)に設けられた磁石(7)とからなるセンサ(10)を用いて、インナジンバル(1)のプラスマイナス3度以内の軸回転を検出する構成である。
(もっと読む)
磁気式位置検出装置
【課題】マグネットから磁気検出手段にかかる磁界変化を磁気検出手段で見ることにより操作部の操作位置を検出する磁気式位置検出装置において、磁気検出手段の検出出力の直線性をより向上することができる。
【解決手段】磁気式位置検出装置4には、セレクトレバーの操作に応じてスライド移動するカウンタマグネット6と、周囲にバイアス磁界を発生するバイアスマグネット(図示略)と、これら2つのマグネットの合成磁界を検出してカウンタマグネット6のスライド位置を検出するMRセンサ8とが設けられる。カウンタマグネット6は、円リング形状のマグネットの一部分を切り出した円弧形状であり、その反り面がMRセンサ8に磁界をかける被検知面11となっている。
(もっと読む)
磁気変位センサ
磁気センサ(1)において、改善された測定特性を得るために、磁石(4,5)は、x軸の方向に、磁束密度のz成分(Bz)が行程の範囲において実質的に直線的な特性曲線を持つように、形成され、かつ/又は磁石(4,5)は、y軸の方向に、z成分(Bz)が横ずれの範囲において実質的に一定であるように、形成されている。 (もっと読む)
1 - 20 / 32
[ Back to top ]