
Fターム[2F065BB27]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 被測定物にマークがあるもの (1,600)
Fターム[2F065BB27]の下位に属するFターム
マーク形状 (329)
マークが光を発するもの (245)
Fターム[2F065BB27]に分類される特許
1 - 20 / 1,026
薄膜形成装置及び薄膜形成方法
レーザトラッカー
測位システム、測位方法、及びプログラム
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
部品実装装置および部品実装方法
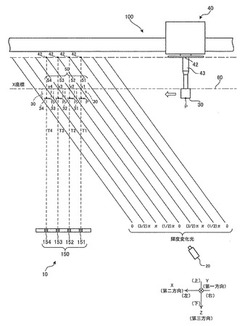
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
転写装置、アライメント方法および転写方法

【課題】担持体および基板のそれぞれに形成されたアライメントマークの両方に同時に撮像手段のピントを合わせることができない場合であっても、担持体と基板との位置合わせを高精度に行う。
【解決手段】透明なブランケットを介してCCDカメラで撮像された画像IMから、基板側のアライメントパターンAP1およびブランケット側のアライメントパターンAP2それぞれの重心位置G1mおよびG2mを画像処理により求める。ブランケット側のアライメントパターンAP2については、ピントが合った状態で撮像された画像からエッジ抽出を伴う処理により重心G2mの位置を特定する。ピントが合わず輪郭がぼやけた状態で撮像された基板側のアライメントパターンAP1については、高い空間周波数成分を除去して低周波成分を抽出し、その結果から重心G1mの位置を特定する。
(もっと読む)
距離計測システム
【課題】計測対象物に添付した計測用コードを撮像し、画面上に表示した計測コードの画像上の2点を指定することで、2点間の距離を計算し、画面上に表示する距離計測システムを提供する。
【解決手段】計測用コード10と、撮像手段23と、計測用ソフトウェア29、及び端末機20と、からなる距離計測システムであって、端末機20は、計測用ソフトウェア29をインストールされ、表示部22に撮像手段23によって、計測用コード10を測定物1に添付した状態を撮像して作製した画像データを表示し、計測用ソフトウェア29は、表示部22に表示された計測用コード10を判読し、画像データ中の計測用コード10に対して指定された間隔の距離値を算出することができ、距離値を、表示部22に表示された画像データに重ねて表示すること、及び計測用コード10は、一次元コード又は二次元コードからなる。
(もっと読む)
積層ゴムの検査装置及び積層ゴム
【課題】積層ゴムの水平変位量及び回転量を同時に測定する。
【解決手段】上部部材と下部部材に固定され、水平方向に変位される積層ゴム10の外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段34A,34Bと、前記撮像手段34A,34Bによって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段34A,34Bによって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴム10の水平変位量及び中心軸周りの回転量を演算する演算手段46と、を有する。
(もっと読む)
位置検出装置および露光装置
【課題】波長差に起因する計測誤差を低減して高精度な位置検出を行う位置検出装置を提供する。
【解決手段】基準マークSMを利用して被検出体WMの位置を検出する位置検出装置であって、第1の波長帯域を有する計測光を用いて被検出体WMを照明する第1の照明光学系5と、第2の波長帯域を有する基準光を用いて基準マークSMを照明する第2の照明光学系13と、被検出体WMからの光束および基準マークSMからの光束を検出する検出光学系10と、検出光学系10で検出された光束に基づいて被検出体WMの位置を検出する位置検出部48とを有し、基準光の第2の波長帯域は、計測光の第1の波長帯域の上限と下限との間に設定されている。
(もっと読む)
情報処理装置、情報処理方法
【課題】撮像装置や現実物体に装着された姿勢センサの校正を、簡便かつ正確に行う為の技術を提供する。
【解決手段】姿勢計測値取得部145は、撮像装置120に装着された姿勢センサ110による姿勢計測値、現実物体125に装着されたセンサ115による姿勢計測値を取得する。画像処理部135は、現実物体125上に配置された指標の撮像画像上における画像座標を取得する。校正部160は、撮像装置120に対するセンサ110の配置情報、現実物体125に対するセンサ115の配置情報、のうち少なくとも1つを、上記2つの姿勢計測値、画像座標を用いて求める。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
カラーフィルタ基板の欠陥検査方法
【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
露光装置
【課題】
携帯機器向けのような小さい液晶製品の基板部品であっても、正確なマスクの位置を設定することができる。
【解決手段】
基板の画像情報を取得するために、マスク部に対して複数種の透過光を照射し、マスク部の透光窓を介して取得された透過光を画像情報に変換し、変換された画像情報において、マスク部の遮蔽線の幅は、所定の透過光を透過した、画面表示画面の隣り合う同一色の画素に対応するパターンの間に位置するパターンを覆うように設定されたものである。
(もっと読む)
対象物の三次元座標を決定する方法および装置
【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
監視装置、プログラム
【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
位置決め装置
【課題】透明性基板上に形成された不透明なデバイスパターンを観察像において明確に識別することができる観察方法、および観察装置を提供する。
【解決手段】デバイスパターン3が形成されている側に粘着シート4を貼り付けたうえで透明なステージ7に固定し、ステージ7の上方から同軸透過照明光L1と斜光透過照明光L2とを重畳的に照射するとともに、ステージ7の下方側からステージ7を介して裏面観察手段6で観察することで、観察像においては、デバイスパターン3に対応して、暗い(黒色の)デバイスパターン像が観察され、デバイスパターン像IP1以外の部分は明るく観察される。また、気泡5に対応する部分IB1についても十分に明るく観察される。これにより、観察像においてデバイスパターン3の形状を明確に特定することが可能となる。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
刻印装置
【課題】刻印試験を短時間で行うこと。
【解決手段】刻印装置1は、鋼片製品を固定する製品固定部2と、刻印試験を行うための鋼片製品と同種の鋼片試料を固定する試料固定部3と、製品固定部2および試料固定部3にそれぞれ固定された鋼片製品および鋼片試料に刻印ピン4bを押圧することによって鋼片製品および鋼片試料の表面に刻印を付与する刻印付与部4と、を備える。このような構成によれば、刻印試験を行う際、製造ラインに製品が搬送されてくるまで待機する必要がなくなるので、刻印試験を短時間で行うことができる。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
1 - 20 / 1,026
[ Back to top ]