
Fターム[2F065BB29]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 被測定物にマークがあるもの (1,600) | マークが光を発するもの (245)
Fターム[2F065BB29]の下位に属するFターム
けい光物質 (39)
Fターム[2F065BB29]に分類される特許
1 - 20 / 206
画像測定装置
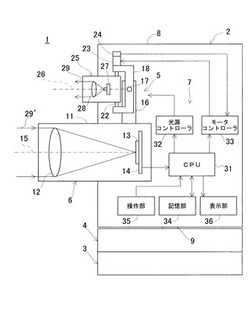
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
検査装置及び方法

【課題】スポット溶接部の有無及び位置を精度良く計測することができる検査装置及び検査方法を提供する。
【解決手段】取得画像上のスポット溶接部を抽出する溶接部抽出部と、抽出したスポット溶接部の座標を算出する座標算出部9と、光線によって計測対象物上に指し示された3点以上の基準点を取得画像から抽出する基準点抽出部20と、抽出した取得画像上の基準点の座標を基に正対対象物に対する計測対象物の傾斜及び倍率のずれに起因する誤差を補正する補正値を算出する第1の補正値算出部21と、取得画像上の計測対象物の特徴量を抽出する特徴量抽出部22と、抽出した特徴量から計測対象物の蛇行及び撮像軸周りの回転に起因する誤差を補正する補正値を算出する第2の補正値算出部23と、補正値算出部21,23で算出した補正値によりスポット溶接部の座標を補正する座標補正部24とを備えている。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
キャリブレーション方法および映像表示装置
【課題】テレビジョン装置に固定されたカメラのキャリブレーションを行い易いキャリブレーション方法および映像表示装置を提供することである。
【解決手段】実施形態のキャリブレーション方法は、カメラおよび第1ディスプレイを備える映像表示装置のカメラ映像を補正するキャリブレーション方法であって、設置工程と、第1表示工程と、反射工程と、撮像工程と、算出工程と、補正工程とを含む。設置工程では、前記第1ディスプレイと、第2ディスプレイとを対向させて設置する。第1表示工程では、前記第1ディスプレイに所定の表示画像を表示させる。反射工程では、前記第1ディスプレイ上の表示画像を前記第2ディスプレイの表面で反射させる。撮像工程では、前記第2ディスプレイで反射された前記表示画像を前記カメラによって撮像する。算出工程では、カメラ映像における前記表示画像の位置のずれから、前記カメラと前記第1ディスプレイとの相対的位置関係を算出する。補正工程では、前記相対的位置関係に基づいて前記カメラ映像を補正する。
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
光学式変位測定装置
【課題】光源から放射された入射光の微小な変位を測定するにあたり、出力信号のS/Nを向上させるとともに、回路構成を小型化することができる光学式変位測定装置を得る。
【解決手段】受光面が光に対して不感なギャップを介して複数の領域に分割された4分割フォトダイオード10に対して、光源から放射された入射光を入射させ、4分割フォトダイオード10のフォトダイオード11A〜11Dからの出力を増幅し、増幅された出力の変化に基づいて、4分割フォトダイオード10に対する入射光の相対的な変位を測定する光学式変位測定装置であって、4分割フォトダイオード10のフォトダイオード11A〜11Dには、それぞれ入射光によって出力を生じない不感領域12と、入射光によって出力を生じる感光領域13とが形成され、4分割フォトダイオード10全体について、不感領域12は、感光領域13に囲まれているものである。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
3次元相対座標計測装置およびその方法
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
位置座標対応テーブル作成システム及び位置座標対応テーブル作成方法
【課題】車両に搭載された車載装置にて取得される車両の世界座標系と路側装置にて取得される車両のカメラ座標系との対応テーブルを作成する処理の効率化を図る。
【解決手段】車両の世界座標系の位置座標データを取得するとともに、光源/熱源を、その間隔が不均等となるパターンで間欠出力する車載装置20と、車両を撮影する路側装置10と、車載装置20における光源/熱源の出力タイミング情報と、路側装置10にて撮影された画像に含まれる光源/熱源の出力タイミングとに基づいて、車両の世界座標系の位置座標データと車両のカメラ座標系の位置座標データとを時刻同期させ、車両についての世界座標系の位置座標データとカメラ系座標の位置座標データとの対応テーブルを作成する位置対応テーブル作成部30とを有する。
(もっと読む)
入力装置、入力制御方法及びプログラム
【課題】 低消費電力でコストを掛けずに直感的な遠隔操作を行えるようにすることにある。
【解決手段】 入力装置(10)は、離隔位置にある所定立体形状のマーカ体(18、33、42)を画像認識する画像認識手段(8)と、前記画像認識手段の認識結果に基づいて前記マーカ体の姿勢を判定する姿勢判定手段(13)と、前記姿勢判定手段の判定結果に対応したイベントを発生するイベント発生手段(15)とを備える。マーカ体(18、33、42)の画像を認識し、その画像に基づいてマーカ体の姿勢を判定して遠隔操作用のイベントを発生する。リモコンに適用する場合は、リモコン本体にマーカ体を取り付ければよい。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
表示装置及びナビゲーション装置
【課題】描画対象の画像データを増大させることなく、実空間の光源環境条件に合わせて描画対象の画像を表示することができる表示装置を提供する。
【解決手段】表示モニタ8周辺の光源環境情報を検出する複数の光源方向検出モジュール4と、複数の光源方向検出モジュール4で検出された光源環境情報から、表示モニタ8周辺の実空間の光源環境条件を示す情報を算出する光源方向演算部6と、光源方向演算部6で算出された実空間の光源環境条件を示す情報に基づいて、表示モニタ8で表示する仮想描画空間の光源環境条件を実空間に合わせて、描画対象の画像を表示モニタ8に表示する描画部7とを備える。
(もっと読む)
形状測定装置の校正方法、形状測定装置、校正用ターゲット
【課題】光断面式により形状を測定する形状測定装置の校正を、校正用ターゲットを頻繁に移動させることなく行うことのできる形状測定装置の校正方法、形状測定装置及び校正用ターゲットを提供する。
【解決手段】底面形状及び寸法が既知である柱体の校正用ターゲット20に、校正用ターゲット20の底面形状における複数の特徴点に対応し、該底面と平行に配置された複数の発光点を含む少なくとも3組の発光体群21〜23を、校正用ターゲット20の柱体高さ方向の位置が異なり、且つそれぞれの前記特徴点と該特徴点に対応する前記発光点各々とが同一直線上に位置するように並設し、発光体各々及びラインレーザの撮像画像と射影変換で複比が不変であることとに基づいて校正用ターゲット20の特徴点の位置座標を同定し、装置校正を行う。
(もっと読む)
屋内用自律走行移動体の自己位置測定方法及び装置
【課題】人間がいるエリアを自律走行する場合であっても、屋内用の自律走行移動体の自己位置を、光源の追加無しに、同じエリアの人間に視覚的な違和感を持たせにくく、かつ、周辺の環境状態の影響を受けにくい形態で測定すること。
【解決手段】走行台車1に搭載したビデオカメラ4aの撮影画像中に、天井の複数の照明器3のうち最低1個が常に入るようにした。そして、各照明器3は、自己のユニークなID番号のパターンで変調した照明光を発光し、ビデオカメラ4aで撮影した照明器3とその設置位置を、受光センサ4bが受光したその照明器3からの照明光を復調して得たID番号に基づいて照合する。照合した照明器3の設置位置と、ビデオカメラ4aの撮影画像から計算したビデオカメラ4a乃至走行台車1からの照明器3の相対位置とに基づいて、走行台車1の自己位置を測定する。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
1 - 20 / 206
[ Back to top ]