
Fターム[2F065FF13]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 光レーダ法 (401) | 位相差 (80)
Fターム[2F065FF13]に分類される特許
1 - 20 / 80
撮像装置、撮像方法、及びプログラム
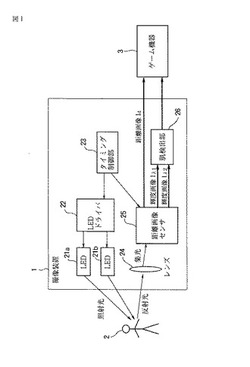
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
監視装置、プログラム

【課題】ベッドを基準にして監視すべき領域を自動的に検出することにより、監視対象の人の動作を正確かつ再現性よく検出することを可能にした監視装置を提供する。
【解決手段】距離画像センサ10は、画素値が物体までの距離値である距離画像を生成する。距離画像センサ10の視野領域には、監視対象であるベッドの全体を含む。ベッド認識部21は、距離画像センサ10が出力した距離画像を用いてベッドの位置を抽出する。人認識部22は、距離画像センサ10が出力した距離画像のうちベッド認識部21により認識したベッドの範囲内と範囲外とにおいて人が占有する領域を検出する。行動判定部23は、ベッド認識部21により検出したベッドと人認識部22により検出した人の領域との組み合わせによりベッドに対する人の動作を判別する。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
地盤変位測定機構を用いた警報発生装置
【課題】地盤変位の測定に於いて拡散レーザ光を用い、レーザ光の単位面積当たりの光量を減少し、人、動物への眼に対する影響を減少する。また、雨、霧、雪等の影響を少なくした観測を可能とする。また、地盤変位の発生が予測される位置への設置作業を迅速にし作業者の安全性を確保できる。また、測定機構により測定した位相のズレが一定の許容範囲を超えたときに警報発生機構によって警報を発生させる。
【解決手段】照射先のビーム直径を照射元のビーム直径よりも大きくした拡散レーザ光4を発振するレーザ光発振部1と、地盤変位の発生予測位置に設置するレーザ光反射板6と、反射される反射波7を受光する検出器8と、この検出器8によって受光した反射波7とレーザ光発振部1の照射波10の位相のズレからレーザ光発振部1とレーザ光反射板6の距離を計測する測定機構11と、位相のズレが設置時における基準値の許容範囲を超えたときに警報を発生させる警報発生機構14とから成るものである。
(もっと読む)
基板検査装置及び基板検査方法
【課題】基板に形成された凹部の深さを、加工方法の制約を受けず、かつ、任意の時間に、非破壊、非接触で測定する技術を提供する。
【解決手段】基板9に形成された貫通ビア9H(凹部)の深度を検査する基板検査装置100であって、基板9に向けて電磁波パルスを照射する電磁波パルス照射部13と、電磁波パルスを検出する電磁波パルス検出部15とを備える。また、基板検査装置100は、貫通ビア9Hが形成されているビア形成領域92Rを透過した電磁波パルスの時間波形と、ビア形成領域92Rとは異なる参照領域を透過した電磁波パルスの時間波形とを比較して、その位相差を取得する位相差取得部25と、前記位相差に基づいて、前記ビア形成領域に形成された貫通ビアの深度を取得するビア深度取得部27とを備える。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
光学式検出装置、表示装置及び電子機器
【課題】広い範囲での対象物のセンシングが可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、光源光を出射する光源部と、光源部からの光源光を曲線状の導光経路に沿って導光する曲線形状のライトガイドと、ライトガイドの外周側から出射される光源光を受け、曲線形状のライトガイドの内周側から外周側へと向かう方向に照射光の照射方向を設定する照射方向設定部と、照射光が対象物に反射されることによる反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、少なくとも対象物が位置する方向を検出する検出部50を含む。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
車両判定システム及び通行物体管理システム
【課題】通行する物体が車両であるか否かを正確に判定する。
【解決手段】三次元形状記憶部211は、車両である物体と車両でない物体とを含む複数の物体の三次元形状を記憶する。三次元形状照合部212は、三次元形状測定装置が測定した物体の三次元形状と、三次元形状記憶部211が記憶した三次元形状とを比較して、最も近い三次元形状を判定する。種別判定部213は、三次元形状照合部212の判定結果に基づいて、三次元形状測定装置が三次元形状を測定した物体が、車両であるか否かを判定する。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
波面操作および改良3D測定方法および装置
【課題】光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
積雪深計測システム
【課題】本発明は、高い精度で計測でき且つ安全性の向上が図られ、積雪深の測定
結果を階的に警報出力できるものである。
【解決手段】
本発明は図1に示すように、積雪の表面に向けたスキャナより、レーザ光線を発光
させ、扇状に往復走査し、雪による反射光がスキャナに戻り受光するまでの位相差を
検出して距離を測定し、その距離データを送信するセンサー部と、前記センサー
部から受信した距離データを積雪深データに変える演算手段と、積雪深データを
出力する機能と、予め積雪深データの設定値を信号出力する機能を持つ処理部
からなる積雪深計測システム。
(もっと読む)
歩行データ計測装置
【課題】歩行データを精度良く計測する。
【解決手段】計測装置10は、接地センサ14、24、走査型光学距離センサ(LRF)12、受光器22a、22b、演算ユニット18を備える。LRF12は、測距用照射光の強さを変化させることによって照射光に情報を含ませることができる。各受光器は、受光した照射光に含まれている情報を読み取ることができる。計測装置10は、接地センサが接地を検知している間、LRFが照射方向を示す照射方向情報を含ませた照射光を照射して各照射方向における距離を計測する。次いで、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットは、受光器識別子と照射方向情報と各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出する。
(もっと読む)
基板をコートする装置及び方法
本発明は,基板をコーティングする装置に関し,真空チャンバーと,内部がコートされる基板を受ける様に設計された真空チャンバーと,粒子の衝撃により装置の動作の間に除去されるように意図された少なくとも一つのスパッタリングターゲットを有し,少なくとも一つの窓が,前記真空チャンバーの壁に配置され,そして,前記スパッタリングターゲットの摩滅を判定する装置を有し,前記真空チャンバーの外側の少なくとも一つの予め規定されたポイントと,前記スパッタリングターゲットの表面の少なくとも一つの予め規定されたポイントとの間の距離を光学的に測定する側的装置を有し,前記測定装置が,更に視差オフセット及び/又は幾何学的歪みを修正できる評価装置を有する。さらに,本発明は,対応する方法に関する。 (もっと読む)
人数カウンタ
【課題】高精度な人物認識および人物追跡により精度よく人数をカウントできる。
【解決手段】画素ごとに、カメラから測定対象までの距離を計測する計測部106と、測定対象が接地する平面に画素を写像した場合の画素位置と距離とを関連付けた距離情報と、画素位置において平面に対して垂直な高さ方向の距離を示す距離情報とを含む3次元データを画素ごとに格納する格納部107と、3次元データから、閾値以内となる距離情報を含む3次元データのみ抽出してクラスタリングし、人候補領域をサンプリングフレームごとに得るクラスタリング部115と、サンプリングフレームごとに得られた複数の人候補領域間の相関値に基づいて同一の人候補領域を判定し、同一の人候補領域の移動軌跡を追跡する追跡部117と、人候補領域が予め人候補領域より大きく設定した画素領域を通過した場合に、その通過数を通過人数としてカウントするカウント部118と、を具備する。
(もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を相対的に表示することが可能な内視鏡装置を得る。
【解決手段】スコープコントローラ231は、観察画像を仮想的に複数のメッシュに区分する。そして、メッシュの中心点Oに向けてレーザ光照射部215にレーザ光を照射させる。レーザ光受光部216は中心点Oからの反射光を受光して、反射光の位相を検出する。スコープコントローラ231は、照射したレーザ光と反射光との位相差を用いて、メッシュの中心点Oから遠位端部211までの距離を算出する。システムコントローラ301が、受信した距離に応じて、等距離線を作成し、表示画像に合成する。そして、表示画像を表示部400に表示させる。遠位端部211から最も距離が近い部位を取り囲む等距離線は、最も濃い色で描かれ、遠位端部211から距離が離れるにつれて等距離線を表す色が薄くなる。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
環境を光学的に走査および測定する方法
レーザスキャナ10を用いて環境を光学的に走査および測定する方法であって、レーザスキャナ10が、中心C10を有し、走査を行うために、光ビーム18、20を用いてその環境を光学的に走査および測定し、制御および評価ユニットを用いてその環境を評価し、中心C33を有するカラーカメラ33が、走査sとリンクさせなければならない環境の着色画像i0を取り込み、カラーカメラ33が接続されたレーザスキャナ10の制御および評価ユニット22が、共通の基準表面上への着色画像i0の投影i1および走査sの投影が最善の可能な形で互いと適合するまで、各着色画像i0に対して繰り返しカラーカメラ33を仮想的に動かすことによって、そしてカラーカメラ33のこの新しい仮想位置および/または向きに対して着色画像i0の少なくとも一部を変形することによって、走査sと着色画像i0をリンクさせ、中心C10に対するカラーカメラ33の中心C33および/もしくは向き、ならびに/またはレーザスキャナ10の向きの偏差を補正する方法が提供される。  (もっと読む)
(もっと読む)
1 - 20 / 80
[ Back to top ]