
Fターム[2F065FF21]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 測定点を捜すもの (476)
Fターム[2F065FF21]の下位に属するFターム
当接部材によるもの (8)
光ビームの投射又は視準 (246)
モニター画像上で (129)
自動追尾 (81)
Fターム[2F065FF21]に分類される特許
1 - 12 / 12
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置
【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
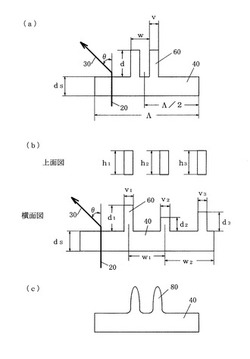
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
画像測定装置、画像測定装置方法、及び画像測定プログラム

【課題】測定を迅速に実行可能な画像測定装置、画像測定方法、及び画像測定プログラムを提供する。
【解決手段】画像測定装置は、所定の幅を有して線状に延び且つ所定位置に段差が設けられたリード部を有するワークの画像を測定する。画像測定装置は、リード部の画像IM11を取得する画像取得部と、リード部の画像IM11に基づきリード部の輪郭を含む領域(第1領域)AR1を抽出する第1抽出部と、リード部の画像IM11に基づき段差を含む領域AR21(第2領域)を抽出する第2抽出部と、領域AR1及び領域AR21に基づきリード部における段差の位置AR3を特定する特定部とを備える。
(もっと読む)
ビジョンセンサー用マーカ及びアクチュエータへの作業空間認識方法
【課題】作業平面が多少傾斜していても、測定機器を最小限にして、各マーカの3次元座標を測定できアクチュエータへ作業空間を認識させるアクチュエータへの作業空間認識方法を提供する。
【解決手段】アクチュエータ2により駆動されるロボットアーム1にビジョンセンサー4を備え、該ビジョンセンサー4により作業平面20a上に配置された第1〜第3球体マーカ5〜6を撮影して、アクチュエータ2に作動空間を認識させるので、作業平面20aが多少傾斜していても、測定機器を最小限にして、各球体マーカ5〜7の3次元座標を測定することができ、アクチュエータ2へ作業空間を認識させることができる。
(もっと読む)
環境計測装置、および環境計測方法
【課題】有線による配線の複雑化をなくし、また、測定結果の出力のための無線による機器への影響をなくす環境計測装置を提供する。
【解決手段】
環境計測装置の、移動制御部が、室内環境を表す環境要素の値を計測する環境計測センサを積載して走行する走行部を駆動させて、予め定められた計測点に自装置を移動し、中央制御部が、移動制御部が計測点に自装置を移動させると、環境計測センサに環境要素の値を計測させる。
(もっと読む)
吸着部品表裏判定装置及び吸着部品表裏判定方法
【課題】部品実装機の吸着ノズルに吸着した部品を側面方向からカメラで撮像した画像に基づいて簡単な処理で該吸着部品の表裏を判定できるようにする。
【解決手段】吸着ノズルに吸着した部品を側面方向(水平方向)からカメラで撮像して吸着部品の側面の画像を取り込んで画像処理する。そして、画像に表される吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置を測定し、該吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置との差分値を算出して、該差分値が表裏判定しきい値以上であるか否かで、該吸着部品の吸着姿勢が表裏反対であるか否かを判定する。
(もっと読む)
座標検出装置
【課題】 2点同時入力の検出を可能とする光学式センサを使用した座標入力装置において、2点が重なるような動作を行っても交差および折り返し動作を識別することを可能とすること。
【解決手段】 四角形状の座標入力面を照射光によって走査し、照射方向の対向する位置に設置された再帰反射材によって反射された光を受光する光学式センサを有し、前記座標入力面に挿入された座標指示物による遮光タイミングに基づき前記座標入力面に挿入された座標指示物の座標位置を検出する座標検出装置において、前記照射光の走査によって順次に検出した座標位置を記憶する位置座標記憶手段と、記憶した座標位置と新たに検出した座標位置とに基づき前記座標指示物による指示座標の移動に伴う速度ベクトルを順次算出し、算出した速度ベクトルに基づき、前記座標入力面に挿入された2つの座標指示物による座標指示の交差動作と折り返し動作の座標位置を識別する演算手段を備える。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】カメラの取得画像に基づいて撮影画像に含まれる特徴点の三次元位置を算出する構成を実現する。
【解決手段】カメラの取得画像に基づいて正規分布に従った存在確率分布を持つカメラ位置姿勢情報を生成し、さらに、カメラの取得画像に基づいて正規分布に従った特徴点追跡誤差分布を生成し、これらの正規分布に従った存在確率分布を持つカメラ位置姿勢情報と、正規分布に従った特徴点追跡誤差分布情報を適用して特徴点の三次元空間における存在確率分布を算出する。本構成によりカメラの取得画像に含まれる特徴点の三次元位置をより正確に解析すること可能となる。
(もっと読む)
投影露光装置
【課題】穿孔装置等の機械的な装置を用いることなく、露光光によって第1のレチクル基準マーク投影体と第2のレチクル基準マーク投影体とを形成し、塵埃を生じにくくして投影体である導体パターンを的確に形成することができるとともに、構成や処理を簡素にして間歇的に導体パターンを形成できる投影露光装置を提供する。
【解決手段】被転写パターンの像に対応したパターン投影体と、被転写パターンの基準位置を示す第1のレチクル基準マーク及び第2のレチクル基準マークの像に対応した第1のレチクル基準マーク投影体及び第2のレチクル基準マーク投影体と、を露光光によって、被露光体に形成し、第1のレチクル基準マーク投影体の位置と第2のレチクル基準マーク投影体の位置と検出して、被露光体の位置を調節する。
(もっと読む)
部品実装基板用の検査方法および検査システム、部品実装基板の製造方法
【課題】検査の精度を大幅に高められるようにする。
【解決手段】部品実装基板の製造ラインにおいて、工程毎に検査機1を配備するととも
に、各検査機1をネットワーク回線2を介して相互に通信可能に設定する。各検査機1で
は、検査を実行する毎に、その検査結果、測定データ、検査に使用した画像データなどを
メモリに保存する。また先頭のベア基板検査機1Aを除く各検査機1(はんだ印刷検査機
1B、部品実装検査機1C、リフロー後検査機1D)では、前工程の検査機1から、検査
対象の基板についてこの検査機1が保存している情報の送信を受け、その送信情報を用い
た検査を実行する。
(もっと読む)
位置検出装置及び位置検出方法
【課題】
本発明は、外的要因による影響を受けにくく、かつ、安価とすることが可能な、位置検出装置及び方法を提供しようとするものである。
【解決手段】
投写部1から、2次元平面上の位置に応じて異なる特徴を持つマーカーを構成する光を投写する。
受光部2は、投写部1から投射された光の少なくとも一部を受光する。受光部で得られた光の特徴は算出部に送られる。
算出部3は、受光部2で受光された光の特徴に基づいて、受光部2の位置を算出する。これにより、受光部2の位置を検出することができる。
(もっと読む)
光学式測定装置及び光学式測定方法
【課題】 凹凸を有する被測定物の形状を高精度に測定できるようにすること。
【解決手段】 光学式測定装置は、測定用光を出力する光源105、107、109と被測定物114、115で反射してきた前記測定用光を検出する光検出部106、108、110とを有する複数の測定部101〜103と、複数の測定部101〜103で検出した測定用光に基づいて被測定物114、115の形状を算出する制御部104とを備えており、各測定部101〜103の光源105、107、109から出力される測定用光の光軸は相互に交差しないと共に所定範囲内の共通領域113を通るように各光源105、107、109は測定用光を出力する。
(もっと読む)
レーザ加工ビームを用いてワークピースを遠隔処理する装置
レーザ加工ビーム(4)を用いてワークピース(2)を遠隔処理する装置には、プログラマブル数値制御部(12)をもつオペレーティング装置(11)を備えたスキャナ光学系(6)が設けられている。数値制御部(12)は、ワークピース(2)上の少なくとも1つの加工位置(3a,3b,3c,3d)をマークするためのポインタマーク(14)を備えたポインタ(13)を利用してプログラミングされる。その際、加工位置(3a,3b,3c,3d)をマークしているポインタマーク(14)を検出する手段(15)と、スキャナ光学系(6)のためのオペレーティング装置(11)の数値制御部(12)と接続された評価手段(18)が用いられる。スキャナ光学系(6)のためのオペレーティング装置(11)の数値制御部(12)に対する設定値を、加工位置(3a,3b,3c,3d)をマークしているポインタマーク(14)の検出に基づき評価手段(18)によって規定することができる。この設定値は、以降のワークピース処理についてスキャナ光学系を調節するために用いられる。  (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]