
Fターム[2F065LL15]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 完全反射体 (2,799) | 多面鏡 (197) | 回転 (133)
Fターム[2F065LL15]に分類される特許
1 - 20 / 133
長さ測定装置
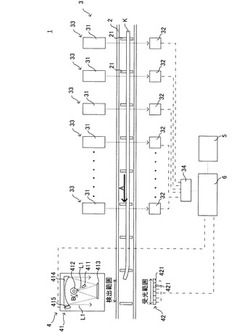
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
エンコーダ及び校正方法

【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
スキャナ装置および物体の三次元形状測定装置
【課題】コヒーレント光源を用いて線状パターンの投影を行いつつ、投影面でのスペックルの発生を抑制する
【解決手段】レーザビームL50を、光ビーム走査装置60によって反射させ、ホログラム記録媒体45に照射する。ホログラム記録媒体45には、走査基点Bに収束する参照光を用いて線状散乱体の像35がホログラムとして記録されている。光ビーム走査装置60は、レーザビームL50を走査基点Bで屈曲させてホログラム記録媒体45に照射する。このとき、レーザビームの屈曲態様を時間的に変化させ、屈曲されたレーザビームL60のホログラム記録媒体45に対する照射位置を時間的に変化させる。ホログラム記録媒体45からの回折光L45は、ステージ210の受光面R上に線状散乱体の再生像35を生成する。受光面Rに物体を載置すると、ホログラム再生光により線状パターンが投影されるので、その投影像を撮影して物体の三次元形状測定を行う。
(もっと読む)
鏡面検査方法及びその装置
【課題】
鏡面検査装置において,高感度にかつ定量的に表面の凹凸を検出することが,困難であった。
【解決手段】
光源から発射された照明光を略平行光にして鏡面状の表面を有する試料に照射し、照明光が照射された試料からの反射光を集光レンズで集光し、集光レンズで集光した試料からの反射光をピンホールを通過させて反射光以外の光を遮光し、ピンホールを通過した試料からの反射光を集光レンズの焦点位置からずれた位置に配置された検出器で検出し、検出器で検出した信号を処理する鏡面検査方法において、検出器はピンホールを通過した試料からの反射光を異なる複数の条件で検出し、検出器で異なる複数の条件で検出した反射光の検出信号を用いて試料上の局所的な凹凸度の分布を検出するようにした。
(もっと読む)
基板検査方法及び装置
【課題】マスク基板に対して洗浄加工を行なった場合の洗浄加工後にマスク基板に残る欠陥が洗浄加工プロセスによるものなのか、マスク基板自体の内部欠陥によるものなかを容易に判定する。
【解決手段】第1及び第2の受光手段に受光された散乱光に基づいて基板の両面(表面及び裏面)に存在する欠陥を検出することができるので、基板の洗浄加工の前後で両面の欠陥の存在位置をそれぞれ比較することによって、洗浄加工によって基板両面に存在していた欠陥が除去されたか否かを容易に判定することができる。すなわち、基板の洗浄加工処理によって基板から所定数の欠陥が除去されなかった場合には、マスク基板の内部に欠陥が存在する可能性が高いので、基板内部の欠陥の検出処理行い。その結果に基づいて洗浄加工によって除去できなかった欠陥が基板内部の欠陥であるのか、洗浄加工プロセスの問題によるものかを容易に判定することができるようになる。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
表面形状の測定方法及び測定装置
【課題】位相変調された干渉信号を検出し、干渉信号の位相を求める信号処理演算を行うことによってナノメータオーダでの分解能で表面形状測定を行うことのできる、表面形状の測定方法及び測定装置を提供する。
【解決手段】半導体レーザ光源11からのレーザ光を偏光方向が互いに直交し位相が異なる2つの光の合成光に変換してから回転多面体ミラー32に導き、レンズ33を通過した合成光を構成する2つの光を偏光ビームスプリッタ34により分離してその一方の光を参照面ミラー42、他方の光を被測定物体41の表面に照射する。参照面ミラー42からの反射光と被測定物体41の表面からの反射光を偏光ビームスプリッタ34により再び重ね合わせ、偏光板52を通過させることにより参照面ミラー42からの反射光と被測定物体41の表面からの反射光を干渉させる。
(もっと読む)
形状計測装置
【課題】従来に比べてパターンの照射範囲を容易に設定可能で、高精度で距離計測が可能な形状計測装置を提供する。
【解決手段】形状計測面を撮像する撮像部11と、撮像部からのタイミング信号にて動作制御され、投光パターン15を形状計測面に投影する照射部7と、投光パターンの設定を行う投光パターン設定部51と、投光パターン及び撮像画像により、投光パターンの照射範囲を設定する照射範囲設定部53とを備えた。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
通過者検出装置、通過者検出方法
【課題】規定の領域を通過する通過者の体型の推定を比較的安価な構成で可能にする。
【解決手段】2次元情報を取得する距離センサ2を、人が通過する枠部材1の上部に設ける。距離センサ2は、枠部材1の内側の平面を人が通過する期間における複数の異なる時刻において、2次元情報を取得する。複数の2次元情報は形状推定部32に入力される。形状推定部32は、2次元情報を用いて前記平面を通過する人の頭部の左右幅を計測するとともに頭部の左右幅から頭部の前後幅を推定する。さらに、前記平面を人が通過する間に取得した複数の2次元情報から人の3次元形状の推定に必要な2次元情報を選択し、通過方向における当該2次元情報の間隔を頭部の前後幅から求めることにより、人の3次元形状を推定する。
(もっと読む)
曲率測定装置
【課題】小型で広い範囲の曲率を精度よく測定できる曲率測定装置を提供する。
【解決手段】被検査体3を載置台5に載置し、レーザ発光器10により発光されたビーム光をポリゴンミラー22で等角速度走査し、fθレンズ50を介して、被検査体3表面を走査する。被検査体3表面から反射されたレーザ光をシリンドリカルレンズ60で集光し、載置台5の一点から等距離で、互いの距離が一定である位置に配置され、被検査体3から反射されるビーム光を検出する2つのビーム光検出センサ(第1及び第2レーザ光検出センサ30,32)でレーザ光を検出した時間差及び2つのビーム光検出センサ30,32の間の距離d2、被検査体3表面からの距離Lに基づいて、被検査体3の表面の曲率を算出する。
(もっと読む)
光学式寸法測定装置
【課題】簡易な構成でありながら、有効測定範囲を認識可能で高精度な測定を実現できる光学式寸法測定装置を提供する。
【解決手段】レーザビームを出力する発光部10と、レーザビームによりワークXが配置される測定領域を走査する走査部20と、測定領域を通過したレーザビームを受光する受光部30と、受光部30で得られた走査方向の明暗パターン(受光信号)からワークXの寸法を算出する寸法算出プログラム512と、を備えた光学式寸法測定装置100において、レーザビームの走査中における点灯区間及び消灯区間をユーザ操作により設定するためのキーボード48と、設定された点灯区間及び消灯区間におけるレーザビームの点灯制御を行う点灯制御プログラム511と、を備え、寸法算出プログラム512は、点灯区間を測定領域中の有効測定範囲とし、有効測定範囲における受光信号からワークXの寸法を算出する。
(もっと読む)
3次元形状計測装置
【課題】外光の存在下においても投影装置からの光出力を増加させることなく対象物の3次元形状を計測することを可能にする。
【解決手段】投影装置1からスリット光が物体Obに投影され、物体Obの表面に形成されるパターンが投影装置2により撮像される。制御回路部3は、投影装置1から光パターンを投影する照射期間と投影しない非照射期間とを設ける。撮像装置2は、電荷の集積と保持とが可能な感光部を備え、画像生成部4は、照射期間に対応する感光部からの受光出力と非照射期間に対応する感光部からの受光出力との差分である反射強度値を画素値とする反射強度画像を生成する。目的画素抽出部5は、反射強度画像において光パターンに対応する画素の位置を抽出する。位置演算部6では、目的画素抽出部5で抽出した画素の位置を用いて対象物の3次元位置を算出する。
(もっと読む)
被記録媒体検出装置、画像形成装置、及び画像形成方法
【課題】被記録媒体の移動方向と直行する被記録媒体の幅と幅方向に沿った厚さとが均一でない被記録媒体であっても、良好な転写性を得ることができる被記録媒体検出装置、画像形成装置、及び画像形成方法を提供する。
【解決手段】光源と、光源からの光を被記録媒体上に搬送方向と垂直な方向に偏向走査する走査光学段と、被記録媒体を透過した光を受光して電気信号に変換する変換手段と、変換手段からの電気信号に基づいて被記録媒体の厚さ及び幅を検出する検出手段と、を備えた。
(もっと読む)
視覚装置
【課題】 隠れた位置にある目標の位置を検知できる視覚装置を提供する。
【解決手段】 プレート6の3次元位置を検知することができるが、プレート6の奥に位置するプレート7に形成された穴8の位置を検知することはできない。そこで、カメラ部3によって穴8を視認することができる位置まで視認装置1を下げ、この状態で反射機構部2の前面に設けたリング状のLED照明装置9から発せられプレート7で第3の方向に反射した光L3は、前記ハーフミラー21b、22bを透過し前記感知領域4の結像エリア4cに入光して結像する。これによって目標である穴8の2次元位置(カメラと穴8との水平距離)を検出することができる。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】 本発明は、測定対象物と当該測定対象物のモデルとの位置および/又は姿勢を比較する際の計算機による計算時間を短縮することを目的とする。
【解決手段】 本発明の情報処理装置は、測定対象物と当該測定対象物のモデルとの位置および/又は姿勢を合わせるための情報処理装置であって、前記測定対象物の撮像画像を取得する取得手段と、前記撮像画像に基づき、前記測定対象物の表面形状を示す情報を算出する算出手段と、前記表面形状を示す情報に基づき、前記モデルの位置および/又は姿勢を制限する制限手段とを有することを特徴とする。
(もっと読む)
1 - 20 / 133
[ Back to top ]