
Fターム[2F065NN02]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 光強度の (880) | 光源出力 (595)
Fターム[2F065NN02]に分類される特許
581 - 595 / 595
立体物イメージスキャナ

【課題】 立体物のイメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、前方の鉛直な線状のターゲット平面領域48にピントが合っている。鉛直で線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明光する。光源34A、34Bの全箇所からの照明光の鉛直面に沿った出射角度が規制され、それにより、ターゲット平面領域48の全箇所にて、照明光の鉛直面に沿った入射角と光量が一定にされる。スキャニングユニット24と光源34A、34Bが一緒にX、Y、Z方向に移動して、被写体の空間15を多数のレイヤとバンドに分割してスキャンする。スキャンで得た画像データからピントの合った画素が抽出され合焦点画像が合成される。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定

対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
端部位置検出装置及び方法、並びにプログラム
【課題】 被検出対象物の端部位置を、被検出対象物の表面の色や凹凸或いは被検出対象物の端部の反りや垂れの影響を受けることく、常に正確に検出できるようにする。
【解決手段】 プリンタにて紙端を検出する際には、まず、用紙をプラテン上に搬送して、用紙からの反射光量に基づき反射型光学センサからの出射光量を調整する(S110、S120)。そして、用紙をプラテンから退避させたときと、用紙をプラテン上に配置したときとで、それぞれ、反射型光学センサをプラテンの一端から他端に向けて移動させ、その移動時にセンサ出力Dをサンプリングすることにより、用紙有り状態での出力D2の時系列データと、用紙無し状態での出力D1の時系列データを生成する(S130〜S160)。そして、各データにおいてセンサ同一位置で得られたD2,D1の偏差△Dを順次求め、偏差△Dが判定値αを横切る点を紙端として検出する(S170,S180)。
(もっと読む)
光学式変位計
【課題】対象物の表面において多重反射した光が受光されることによって受光波形に複数の山部が現れた場合に、合理的かつ適正に計測結果を出力する光学式変位計を提供する。
【解決手段】対象物に光を照射するための発光素子と、複数の画素構成部のそれぞれが対象物からの光を受光して受光量に応じた電気信号を出力するイメージセンサーと、イメージセンサーからの電気信号を処理して受光量の分布に相当する受光波形の山部を検出し、山部のピーク位置又は重心位置を求めることによって対象物までの距離又は対象物の変位を計測する計測処理を一定の周期で連続して実行し、その計測結果を記憶すると共に出力する計測処理部とを備え、計測処理部は、受光波形に複数の山部が検出されたときに、前回の計測結果を今回の計測結果として出力する(ステップ#108)。
(もっと読む)
光学式変位計
【課題】透明の対象物を計測する際に、複数の山部のピーク位置又は重心位置が適切に検出されて対象物の変位や厚みが精度良く計測可能な光学式変位計を提供する。
【解決手段】対象物に光を照射するための発光素子と、対象物からの光を受光して受光量に応じた電気信号を出力するイメージセンサーと、イメージセンサーからの電気信号を増幅する増幅器を含む信号処理回路と、信号処理回路から得られた画像信号の波形における山部を検出して対象物までの距離又は対象物の変位を求める計測処理を実行する制御部とを備えた光学式変位計において、画像信号の波形に複数の山部C1,C2が存在するときに、制御部は、画像信号に基づいて発光素子の発光量及び増幅器の増幅率を含む操作量の少なくとも一つを調整するフィードバック制御と計測処理とを複数の山部C1,C2のそれぞれについて時分割で実行する。
(もっと読む)
推定装置および把持装置
【課題】 環境の条件に限定されず、対象物までの距離を推定する。
【解決手段】 ロボット10は、白色LED23と、カラーカメラ24と、右アーム26と、カラーカメラ24が撮像した複数の画像および白色LED23がワーク14に照射した光の光量を対応付けて記憶するメモリ104と、同一の位置でワーク14を複数回撮像するように制御し、光量が変化するように白色LED23を制御し、2種類以上の画像中にあるワーク14上の同じ位置を表わす画素を特定し、その画素の輝度差および光量差を算出し、白色LED23からワーク14までの距離の推定値を算出し、白色LED23およびカラーカメラ24がワーク14に近づくように、右アーム26を制御する制御用コンピュータと、右アーム26に白色LED23およびカラーカメラ24の移動に従属して移動するように取付けられ、かつワーク14を把持する第1指34〜第3指28とを含む。
(もっと読む)
光ファイバ歪み測定装置
【課題】 煩雑な補正を行うことなく正確な周波数間隔を有するレーザ光を得ることができ、その結果として高い測定精度を得ることができる光ファイバ歪み測定装置を提供する。
【解決手段】 光ファイバ歪み測定装置10は、被測定光ファイバFBに入射させるレーザ光を射出する光源部10aと、被測定光ファイバFBから射出されるレーザ光に含まれる偏波状態の異なる成分間の光路差を測定する測定部10bとを備える。光源部10aは、半導体レーザが設けられたレーザ光源12と、半導体レーザに注入する電流を制御して半導体レーザから射出されるレーザ光の周波数変調を行う光源制御回路11と、半導体レーザから射出されるレーザ光を共振させて被測定光ファイバFBに導くリング共振器13とを備える。
(もっと読む)
ガラスパネルの撓み測定方法
【課題】多くの空間を必要とせず、測定点の選択が容易でより正確な測定方法を提供する。
【解決手段】リングモールド(4)上でガラスパネル(6)を曲げる工程でガラスパネル(6)の撓みを測定する方法であり、ガラスパネルの測定点で撓みを測定し、測定データが曲げ工程の進行状況、特にガラスパネル(6)の加熱又は曲げ工程の不完全さを制御するために適用される方法であり、リングモールド(4)に対して不動の参照面(5a、5b)が設定され、距離ゲージ(7、70)が、参照面(5a、5b)と該距離ゲージ間の距離を測定するために使用され、距離ゲージ(7、70)が、ガラスパネル(6)の測定点と該距離ゲージ間の距離を測定するために利用され、及びガラスパネル(6)の撓みが、参照面(5a、5b)と距離ゲージ(7、70)間の距離を、該ガラスパネル(6)の測定点と該距離ゲージ(7、70)間の距離と比較することにより測定される。
(もっと読む)
人体検知装置及び衛生洗浄装置
【課題】 本発明の課題は、発光素子の経年劣化に影響を与えることなく発光量を補正する人体検知装置を提供する。
【解決手段】 本発明では、被検出体からの反射光を受光レンズで集光させて受光する一次元位置検出素子と、前記一次元位置検出素子から検出される長手方向の両端より検出する電流比で被検出体までの距離を演算する距離演算手段とを備えた人体検知装置において、前記一次元位置検出素子の両端より検出する総電流量を測定する総電流量検出手段と、前記発光素子の周囲温度を検出する温度検出手段と前記発光素子の駆動電流量を可変する駆動電流設定手段とを有するとともに、前記駆動電流設定手段は、前記距離演算手段と前記総電流量検出手段と前記温度検出手段の出力を参照し、前記発光素子の駆動電流量を可変する。
(もっと読む)
光学式変位計
【課題】発光素子の発光量や増幅器の増幅率のフィードバック制御を行うことの利点を残しながら、計測の高速化に対応可能な光学式変位計を提供する。
【解決手段】光学式変位計は、対象物に光を照射するための発光素子と、対象物からの光を受光して画像信号を生成するためのイメージセンサーと、イメージセンサーからの画像信号を増幅する増幅器を含む信号処理回路と、信号処理回路からの画像信号に基づいて発光素子の発光量及び増幅器の増幅率を含む操作量の少なくとも一つのフィードバック制御を実行する制御部とを備え、フィードバック制御における操作量の少なくとも一つの可変幅が変更設定可能である。制御部は、可変幅設定モードにおいて所定期間の操作量のデータに基づいて操作量の適切な可変幅を設定する。
(もっと読む)
パンタグラフのすり板検査装置。
【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
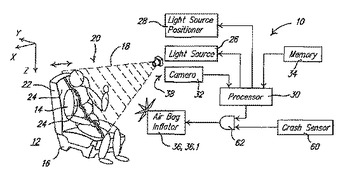
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 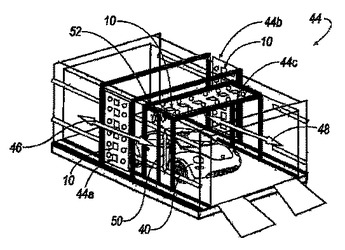 (もっと読む)
(もっと読む)
厚さ検出装置
【課題】光透過性を有する被検出対象物の厚さを反射光に基づいて検出する装置において、反射光の照射領域の中心位置が確実に検出できるように構成された厚さ検出装置を提供する。
【解決手段】光透過性を有する被検出対象物の厚さをその表面及び裏面からの反射光に基づいて検出するにあたり、表面反射光及び裏面反射光のCCDへの照射領域の中心位置を各反射光ごとに検出し、得られた中心位置に基づいて被検出対象物の厚さを検出するようになっている。そして、中心位置の検出においては、まずその検出対象となる反射光の照射領域において、受光レベルが基準レベルを超過する範囲(裏面側:S1〜S2、表面側:S3〜S4)を検出し、この超過する範囲における中点位置を算出する。そして、その算出された中点位置に基づいて、その反射光の照射領域の中心位置を検出することとなる。
(もっと読む)
3次元情報入力カメラ
【課題】 被写体や照明光の影響を受けることなく、正確な3次元情報の入力が可能である3次元情報入力カメラを提供する。
【解決手段】 3次元情報入力カメラは、被写体または照明光についての撮影条件を検出する撮影条件検出手段を備える。投影手段1は、2種以上のパターン光を選択可能に投影できるように構成される。投影手段1は、撮影条件検出手段による被写体または照明光についての撮影条件検出結果に基づいて、投影するパターン光の種類を選択して投影する。
(もっと読む)
581 - 595 / 595
[ Back to top ]