
Fターム[2F065QQ01]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | サンプリング (206)
Fターム[2F065QQ01]に分類される特許
61 - 80 / 206
3次元物体認識装置、並びに3次元物体認識プログラム及びこれが記録されたコンピュータ読み取り可能な記録媒体
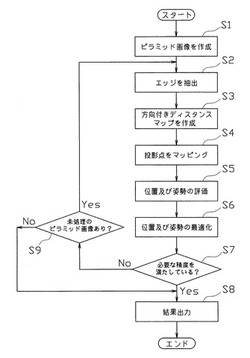
【課題】 2次元画像における輪郭などの特徴から3次元物体を認識する3次元物体認識装置において、隠れの影響を排除してロバスト性を向上させるとともに、位置及び姿勢を最適化して認識精度を高める手段を提供する。
【解決手段】 本発明に係る3次元物体認識装置は、3次元物体を撮影するカメラと、3次元物体の位置及び姿勢を変化させながらカメラ画像に投影し、各投影点の座標及びエッジの向きを算出する手段と、それに基づいて作成したルックアップテーブルを記憶する手段と、ピラミッド画像を作成する手段と、解像度が最も低いピラミッド画像についてエッジを抽出する手段と、方向付きディスタンスマップを作成する手段と、方向付きディスタンスマップ上に各投影点をマッピングする手段と、位置及び姿勢を評価する手段と、位置及び姿勢を最適化する手段と、を備えるものである。
(もっと読む)
形状測定装置,形状測定方法

【課題】薄板状の被測定物の厚み分布の測定において,簡易な装置構成により,被測定物の振動の影響を受けずに高精度で厚み分布の測定を行うことができること。
【解決手段】被測定物1の表裏各面について,レーザ光源2の出射光を2分岐したビーム光をさらに2分岐させて参照面及び表裏相対する測定点1a,1bに反射させ,参照光と物体光とを直交する偏光成分とする非干渉光Pax,Pbxを得て,それを複数に分岐させ,分岐光のうちの1つ以上について波長板a261,a263,a264等で直交する偏光成分の位相差に変化を与えて位相シフトを行い,位相シフト後の分岐光における参照光及び物体光の偏光方向を基準とする共通の偏光成分の抽出により干渉光Qa1〜Qa4,Qb1〜Qb4を得て,それらの強度から前記非干渉光における前記参照光及び前記物体光の偏光成分の位相差を算出し,その位相差の分布から被測定物1の厚み分布を算出する。
(もっと読む)
熱変形測定方法及び装置
【課題】多様なパターンで温度及び形状が変化する被測定物の三次元の熱変形特性を正確に測定できること。
【解決手段】同期信号Strgを時系列で発生させ,その同期信号Strgに同期して,サーモカメラ20及び複数の可視カメラ21から撮像時点が同じ前記熱画像及び複数の前記可視画像のデータの組合せをサンプリングし,撮像時点ごとの可視画像のデータに基づくステレオ画像処理を通じて,撮像時点ごとの三次元形状のデータを算出し,撮像時点が異なる複数の可視画像のデータに基づくデジタル画像相関法でのパターン追跡処理を通じて,前記撮像時点ごとの観測部位の像の前記可視画像上での変位量を算出し,それら算出結果に基づいて,観測部位の撮像時点ごとの三次元座標系での位置及び温度のデータが対応付けられたデータを記録する。
(もっと読む)
周波数走査型干渉計による多重表面検査対象物の測定
周波数走査型干渉計(10)が検査対象物(12)の広い推定オフセット範囲にわたる多重表面(14,15,16)を同時に測定するために構成される。合成測定波長(λ実効)に基づくアンビギュイティインターバル(U)内の中心に検査表面をおくために、検査表面の推定位置の知見が一連のアンビギュイティインターバルと比較される。  (もっと読む)
(もっと読む)
レーザ干渉計
【課題】製造コストを低減させることができ、構成を簡素化することができるレーザ干渉計の提供。
【解決手段】レーザ干渉計1は、所定の周波数を有する変調信号にてレーザ光を変調することでレーザ光の中心波長を安定化して射出するレーザ光源2と、レーザ光を反射する参照鏡4、及び測定鏡5を備える。また、レーザ干渉計1は、参照鏡4、及び測定鏡5にて反射される光の干渉光を変調信号の周波数に対して2以上の整数倍となる周波数のサンプリング周波数でサンプリングしてサンプリング値を取得するサンプリング手段71と、サンプリング手段71にて取得される時系列のサンプリング値をサンプリング周波数に応じて平均して平均値を算出する平均値算出手段721とを備え、平均値算出手段721にて算出された平均値に基づいて、測定鏡5の変位を算出する。
(もっと読む)
信号処理装置及び計測装置
【課題】
安価で信頼性の高い信号処理装置を提供する。
【解決手段】
本発明の信号処理装置は、被計測物の位置を計測する計測装置に用いられる信号処理装置1であって、被計測物の位置に応じた信号の位相を時間に対して回帰することにより、被計測物の速度を算出する回帰演算器19と、第1のサンプリング時における被計測物の位置に回帰演算器19で算出された速度を加算することにより、第2のサンプリング時における被計測物の予測位置を求める予測演算手段(加算器22)と、位相演算手段で求められた第2のサンプリング時の計測位相から予測位置を減算して予測誤差を求める誤差演算手段(減算器23)と、桁拡張した予測誤差を予測位置に加算することにより、第2のサンプリング時における被計測物の位置を求める位置演算手段(加算器21)とを有する。
(もっと読む)
周波数推定方法、周波数推定装置、表面形状測定方法及び表面形状測定装置
【課題】計算負荷が低く、処理時間が短くて済む周波数推定方法、周波数推定装置、表面形状測定方法及び表面形状測定装置を提供すること。
【解決手段】干渉縞や電気信号などの有周期性の観測データにおける周波数を推定する周波数推定方法であって、観測データを取得するステップと、仮定した任意周波数の正弦波状関数をモデル信号として前記観測データに適合させるステップと、前記観測データと前記モデル信号との部分的な位相のずれ量を求めるステップと、前記モデル信号の周波数と、前記位相のずれ量についての位相勾配とに基づいて、前記観測データの周波数を算出するステップとを有することを特徴とする。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】登録される3次元モデルの精度を確保する。
【解決手段】3次元認識の対象とするワークの実物モデルをそれぞれ異なる方向から計測することにより復元された3次元情報a,b,cのうちの情報aを基準として、他の3次元情報b,cをそれぞれ基準の3次元情報に位置合わせされるように座標変換し、変換後の3次元情報b´,c´および基準の3次元情報aをすべて含む3次元情報dを作成する。この3次元情報dは3次元モデルとして仮登録される。一方で、統合された3次元情報a,b´,c´間の差異量を算出し、この差異量に基づく評価指数を3次元モデルが表す輪郭パターンのイメージ図と共に表示する。ユーザは、この表示画面で、同一部位を表す輪郭線のばらつき度合や評価指数の値から3次元モデルの精度を確認し、3次元モデルdを本登録するか否かを判定する。
(もっと読む)
低コヒーレンス走査干渉法における走査エラー補正
被験物体からの試験光と参照光とを合成して、検出器上に干渉パターンを形成する光学系を含む広帯域走査干渉計システムから構成される装置。本装置は、共通の光源から検出器への試験光と参照光との間の光路差(OPD)を走査するように構成されたステージと、一連のOPD増分の各々に対する干渉パターンを記録する検出器を含む検出系であって、各OPD増分の周波数がフレームレートを定義する、検出系とを含む。光学系は、走査時のOPDの変化を示す少なくとも2つの監視干渉信号を生成するように構成され、検出系は、監視干渉信号を記録するように構成される。本装置は、フレームレートより高い周波数において、OPD増分への摂動に対する感度でOPD増分に関する情報を決定するように構成されたプロセッサを含む。  (もっと読む)
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
認識処理方法およびこの方法を用いた画像処理装置
【課題】認識精度を確保しつつ、一定の時間内に対象物を認識する処理を終了する。
【解決手段】認識対象物のモデルの特徴点群から各辺の長さが所定の基準値を満たす三角形を抽出し、モデル三角形として登録する。認識対象物の2次元画像から抽出された特徴点群についても同様に、基準値を満たす三角形を抽出して比較対象三角形として登録する。つぎにモデル三角形と比較対象三角形とを順に対応づけ、頂点の対応関係を複数とおりに設定して、対応づけられた頂点(AとA´、BとB´、CとC´)の座標を用いて、両三角形の対応関係を表す変換パラメータを算出する処理と、モデルの特徴点群と対象物の特徴点群との関係に対する当該変換パラメータの適合度を求める処理とを実行する。そして、対応づけ毎に求められた適合度に基づいてモデルの特徴点群と認識対象物の特徴点群との対応関係を示す変換パラメータを特定することによって、対象物を認識する。
(もっと読む)
ワーク計測システム
【課題】長手方向にわたって細かく径が変化するワークを高い精度で測定が可能なワーク計測システムを提供する。
【解決手段】ワーク計測システム1は、第1ワーク台11および第2ワーク台13と、計測部5と、ディスプレイ41とを備えている。第1ワーク台11および第2ワーク台13は、ワークWを載置可能である。計測部5は、ワークWを計測するための機構であって、ワークWの長手方向に第1ワーク台11および第2ワーク台13と相対移動可能である。ディスプレイ41は、計測部5からの計測データに基づいてワークWの形状を表示する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7の計測結果を基準周期と比較することにより補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
画像処理装置、及び画像測定機
【課題】画像情報の明るさを適切に制御することができる画像処理装置の提供。
【解決手段】画像処理装置は、落射照明用LED21、及び透過照明用LED3と、光量設定手段51と、光量判定手段52と、電流制御手段53とを備える。光量設定手段51は、LED21,3にて被測定物を照明する光量を設定する。光量判定手段52は、光量設定手段51にて設定される光量がLED21,3の低光量域における光量か、高光量域における光量かを判定する。電流制御手段53は、光量判定手段52にて低光量域における光量と判定されたときに、LED21,3に印加する電流をパルス制御する低光量域制御部531と、光量判定手段52にて高光量域における光量と判定されたときに、LED21,3に印加する電流を制御する高光量域制御部532とを備える。
(もっと読む)
光ファイバセンサ装置および温度とひずみの計測方法と光ファイバセンサ
【課題】本発明は、安価な構造で温度とひずみを同時に計測できる光ファイバセンサ装置の提供を目的とする。
【解決手段】本発明は、OFDR方式に適用される光ファイバセンサ装置であって、光ファイバのコアに形成したFBGからなるひずみ検知用のセンサ部3と、該ひずみ検知用のセンサ部に接続されてその端部に反射部を備えた温度検知用光ファイバからなる温度検知用のセンサ部7とを具備した光ファイバセンサSと、参照用反射端16と、光源12と、受光器13とが備えられ、前記温度検知用光ファイバの光路長の変化量から温度変化を計測し、前記FBGのブラッグ波長のシフト量から前記計測された温度変化に相当するブラッグ波長のシフト量を減算することによりひずみを計測する。
(もっと読む)
移動ウェブのパターンの変位を測定する装置
【課題】移動ウェブに関する速度、変位、歪みを効率的に測定する。
【解決手段】移動するウェブ部材14の近くに第1、第2の光センサ配列16、18を設置する。第1、第2の光センサ配列16,18はウェブ部材14の走行方向に沿って所定距離dだけ離れている。第1、第2の光センサ配列16、18の双方に結合されている処理装置40は、第1、第2、第3のコード区画それぞれにより制御され、それぞれ、第1の光センサ配列16でウェブ部材14上のパターンを検出させ、第2の光センサ配列18でウェブ部材14上で前記検出されたパターンを認識させ、そして、ウェブ部材14の速度、距離d、および第1のコード区画に応答するパターンの検出と第2のコード区画に応答するパターンの認識との間の経過時間に基づきウェブ部材14の歪みを計算する。
(もっと読む)
画像生成装置、及びプログラム
【課題】被写体が3次元表示に適さないものであっても、視認性の高い3次元画像を取得すること。
【解決手段】被写体の特徴点情報とその距離情報とを対応付けた点群情報に含まれる距離情報のうち、特定の距離情報よりも大きい距離範囲に属する距離情報が小さくなるように補正する。そして、このようにして補正された点群情報を用いて3次元画像を生成する。このようにすれば、主要被写体と背景被写体との距離が大きい場合であっても、点群情報における主要被写体と背景被写体との距離情報が小さくなる。これにより、補正された点群情報を用いて生成される3次元画像においては、3次元画像を構成する三角形ポリゴンがいびつな形状となることを回避できる。その結果、視認性の高い3次元画像を得ることができる。
(もっと読む)
表面形状および/または膜厚測定方法およびその装置
【課題】表面を透明膜で覆われた測定対象物の透明膜の表面高さ、透明膜の裏面高さ、透明膜の膜厚、及び測定対象物の表面形状を求める。
【解決手段】参照面を光の進行方向に対して任意角度の斜め傾斜姿勢で配備して測定対象面と参照面から同一光路を戻る反射光により干渉縞を発生させる。干渉縞の各画素の強度値をCCDカメラで1回撮像し、CPUは算出対象画素毎とその近傍画素の強度値において、当該画素とその近傍画素の干渉縞波形の直流成分、正弦成分の振幅、及び余弦成分が一定であると仮定することで、干渉縞波形の直流成分、正弦成分の振幅、及び余弦成分の振幅を求めて測定対象物のパラメータおよび装置のパラメータに基づいて当該画素の光の強度値を参照面からの参照光の強度値と測定対象物からの物体光の強度値に分離する。両強度値から未知パラメータである透明膜の表面高さ、裏面高さ、膜厚、及び測定対象物の表面形状を求める。
(もっと読む)
光ファイバ位置特定のための光学マーキング部を備えた光ファイバセンサおよび光ファイバセンサの計測方法と光ファイバセンサ装置
【課題】本発明は、ひずみや温度変化が生じた光ファイバ位置を高い空間分解能で特定できる光ファイバセンサとその測定方法と光ファイバセンサ装置の提供を目的とする。
【解決手段】本発明は、光ファイバのコアに形成したFBGをセンサとし、該センサからのブラッグ反射光と参照用の反射端からの反射光の干渉強度の周期的変化から、前記センサの位置を特定するとともに、前記センサからのブラッグ反射光の波長の変化量から検知部のひずみや温度変化を計測する光周波数領域反射測定(OFDR)方式に用いられる光ファイバセンサであって、FBGからなるひずみや温度変化を計測するための複数のセンシング部1と、これら複数のセンシング部の間に設けられ、ひずみや温度変化をセンシングした光ファイバ位置を特定するための光学マーキング部3を具備してなることを特徴とする。
(もっと読む)
発光装置及び対象物の追尾方法
【課題】発光装置(対象物)の位置を追跡しつつ、データの読み取りも円滑に行うことが可能な技術、発光装置を提供する。
【解決手段】「色彩の変化の変化(変化の切り替え)」でデータを表す発光装置を提供する。最初の1次変化で、その物体の特定、位置の特定を行い、その後、いわば2次変化(1次変化の切り替え)でデータを表している。したがって、物体の位置の特定を行いつつ、自由にデータを表すことが可能となったものである。
(もっと読む)
61 - 80 / 206
[ Back to top ]