
Fターム[2F065QQ14]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の積分 (316)
Fターム[2F065QQ14]の下位に属するFターム
移動平均 (66)
Fターム[2F065QQ14]に分類される特許
161 - 180 / 250
繊維の形状評価方法
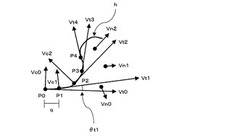
【課題】 複雑で多様な繊維の形状を客観的、定量的に数値化し、その形状を正確な基準として利用し得る、繊維の形状評価方法を提供すること。
【解決手段】 繊維Hの三次元点群画像を得る第1ステップと、この三次元点群画像に基づき三次元繊維曲線hを作成する第2ステップと、この三次元繊維曲線h上に任意の等間隔で複数定めた計算点Pに対し、(a)計算点P上で三次元繊維曲線hに接する接線ベクトルVt、(b)計算点P上で三次元繊維曲線hに接する曲率ベクトルVc、又は(c)互いに隣り合う2つの接線ベクトルで形成される平面の法線ベクトルVn等を描き、互いに隣り合う接線ベクトルVtの間の角度θt、又は互いに隣り合う曲率ベクトルVcの間の角度θc、又は互いに隣り合う法線ベクトルVnの間の角度θn等に基づいて、繊維Hの形状Fを求める第3ステップとを含む。
(もっと読む)
位置検出装置、パターン描画装置および位置検出方法

【課題】基板の主面に対向する基準点に対する基板の相対位置を高精度にかつ安定して求める。
【解決手段】線状パターンが形成された基板9の主面91上における帯状の照射領域に基板9の法線方向に対して傾斜した方向から光が照射され、撮像部42にて反射光が受光されて主面91上の照射領域を含む画像が取得される。パターン描画の際には、基板9の移動に並行してヘッド部31から描画用の光ビームが出射されるとともに、主面91上の複数の位置にて取得される複数の画像を積算することにより積算画像が取得される。積算画像において照射領域の幅方向の各位置にて長手方向に並ぶ複数の画素値を積算することにより平均強度分布が取得され、平均強度分布に基づいて照射領域の幅方向に対応する方向における撮像面420上の反射光の受光位置が特定される。その結果、基準点に対する基板9の相対位置を三角測量法にて高精度にかつ安定して求めることが可能となる。
(もっと読む)
半導体装置の製造方法
【課題】不良の有無を正確に判定することができる半導体装置の製造方法を得る。
【解決手段】まず、電極上に半田膜を形成する。次に、半田膜に斜めから光を当て反射光を測定して原画像を得る。次に、原画像の輝度を長辺方向に微分して微分データを得る。次に、微分データを短辺方向に積算して積算値を求める。次に、積算値の最大値と最小値の差が所定の値以上であり、積算値が最大となる位置と最小となる位置の幅が所定の幅以下である場合に不良と判定する。
(もっと読む)
欠陥検査装置及び欠陥検査方法
【課題】複数の散乱光検出器のしきい値設定を容易化し、個々の散乱光検出器の検出データを適切に取得することができる欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】ウエハ1を載置するステージ装置50と、ステージ装置50上の上は1に検査光31を照射するレーザ光照射装置30と、ウエハ1からの散乱光110〜112を検出し画像信号140a〜142aを出力する散乱光検出器130〜132と、散乱光検出器130〜132の個々の画像信号140a〜142a又は画像信号140a〜142aを基に演算された画像信号151aのうちから選択された画像信号151aに対し欠陥の有無を判定するための対応のしきい値を設定するしきい値設定器530と、画像信号151aがしきい値設定器530に設定されたしきい値を超えた場合にのみ個々の画像信号140a〜142aを取得するしきい値回路160とを備える。
(もっと読む)
アライメントマークの位置検出方法及び該方法を用いたレーザ加工装置
【課題】アライメントマークの位置検出精度を向上させる。
【解決手段】位置合わせを行う対象物を撮影した画像から前記対象物に存在する少なくとも1つのアライメントマークを検出するアライメントマークの位置検出方法において、前記画像から予め設定されたアライメントマークを取得するマーク取得ステップと、前記マーク取得ステップにより取得されたアライメントマークから少なくとも4つの基点となる点を検出する基点検出ステップと、前記基点検出ステップにより検出された基点から複数の線分を取得する線分取得ステップと、前記線分取得ステップにより得られる線分の交点から前記アライメントマークの位置を検出する位置検出ステップとを有することにより、上記課題を解決する。
(もっと読む)
画像位置合装置及びそれを用いた検査装置
【課題】被測定物の注目点の数が多くても、それより遥かに少ない合理的な数のランダムな注目点を選定して、測定画像とそのレファレンス画像とを位置合せする。
【解決手段】レファレンス画像におけるM個の注目体の分布範囲における第1の重心位置から最も遠距離にある1番目の注目体の位置をP1として、1番目から「k−1」番目の各位置より最も遠距離の位置をPkとして、位置Pkをk=1からN(整数、N≪M)まで求められた各位置P1,・・・PN及び前記第1の重心位置を記憶する記憶手段4と、測定画像における第2の重心を求める重心位置算出手段5aと、第1の重心位置と第2の重心位置を同じ位置にして双方の画像を重ねる合成手段5bと、重ねられたレファレンス画像の各位置P1、P2、・・PNとそれらの各位置に対応する測定画像の各位置Q1、Q2、・・・QNが重なるように回転させる回転角算出手段5cと、を備えた。
(もっと読む)
成形体の検査方法およびこの方法を用いた検査装置
【課題】成形体の表面の凹凸欠陥および平滑性不良の双方を、同じ光学系を用いて、効率良くかつ精度良く検出する。
【解決手段】検査対象のワークWに定められた撮像対象領域R毎に、その領域R内の検査対象領域全体を照明できる大きさの拡散光を照射するとともに、ワークWからの正反射光を撮像できるように、カメラ1および光源2を位置合わせする。この位置合わせが行われる都度、光源2の点灯範囲をその出射面の一部にあたるA領域のみに限定して、検査対象領域の一部分を照明するスポット照明と、点灯範囲を限定せずに検査対象領域全体を照明する全体照明とを順に実行し、照明毎にカメラ1に撮像を実行させる。そして、スポット照明下の撮像で生成された画像を用いて平滑性不良検査用の処理を実行し、全体照明下の撮像で生成された画像を用いて凹凸欠陥検査用の処理を実行する。
(もっと読む)
形状測定装置
【課題】ハーフミラーにより照明光を照射し、かつ被検査体からの光を透過光として観測する装置において、観測したい透過光以外のノイズを効率的に除去する。
【解決手段】被検査体の形状を光学的に測定する装置であって、被検査体に照明光を照射する照明光源と、前記照明光のうち所定の偏光成分のみを取り出す第1の偏光素子と、前記照明光を反射して被検査体に照射するハーフミラーと、前記ハーフミラーと被検査体との間に設置された第2の偏光素子と、被検査体からの光を撮像する撮像手段と、撮像手段により得られた被検査体の画像データを記憶および画像処理する処理手段とを備えることを特徴とする形状測定装置。
(もっと読む)
検査方法および装置、リソグラフィ装置、リソグラフィ処理セルおよびデバイス製造方法
【課題】照明光学システムおよび投影光学システムを有するスキャトロメータの収差を測定する方法が提供される。
【解決手段】スキャトロメータ内で、透過性開口のアレイを備えるアパーチャプレートが、投影光学システムの瞳面と共役である照明光学システムの面に挿入される。光学システムの収差は、瞳面における輝点の相対位置を測定することによって測定することができる。
(もっと読む)
3次元データ生成装置、画像取得装置、3次元データ生成方法、画像取得方法およびプログラム
【課題】 ノイズの影響を低減し、対象物体の3次元位置を高い精度で計測することが可能な3次元データ生成装置およびそれに関連する技術を提供する。
【解決手段】 3次元データ生成装置1Aは、計測対象物を異なる視点から撮影してステレオ画像を取得するステレオ画像撮影手段(カメラ2A,2B)と、複数組のステレオ画像の取得期間における計測対象物とステレオ画像撮影手段との相対位置変化の有無を判定する判定部31と、相対位置変化が存在しない期間に取得された複数組のステレオ画像を視点画像ごとに積分して3次元データ生成用の積分画像を生成する積分処理部32と、3次元データ生成用の積分画像を用いて計測対象物の3次元データを算出する3次元データ算出部33とを備える。
(もっと読む)
線状の欠陥の検出装置および半導体基板の製造装置、線状の欠陥の検出方法および半導体基板の製造方法、コンピュータを当該検出装置または当該製造装置として機能させるためのプログラム、ならびに当該プログラムを格納した記録媒体
【課題】線状の欠陥を精度よく検出できる検査方法を提供する。
【解決手段】検査方法は、画像データを読み込むステップ(S920)と、画像を分割するステップ(S930)と、分割画像ごとに濃淡を投影して1次元データを生成するステップ(S940)と、分割画像毎に線状欠陥候補Aを決定するステップ(S950)と、欠陥候補強調1次元データを生成するステップ(S960)と、線状欠陥候補Aの領域の欠陥候補強調1次元データを全分割画像について積算して平均値を算出するステップ(S970)と、その平均値から複数の分割画像にまたがる線状の欠陥候補の領域を算出するステップ(S980)とを備える。
(もっと読む)
光学測定における大気摂動の影響の補正
概括すると、第1の態様では、本発明は一つの方法を特徴とし、本方法は、干渉計アセンブリ(100)を使用して3つの異なる出力ビーム(181〜183,191〜193)を供給するステップであって、各出力ビームは、対応する第1ビームと対応する第2ビームとの光路長差に関連付けられる干渉位相を含み、各第1ビームが測定オブジェクト(120)に少なくとも1回は接触する、前記供給するステップと、3つの異なる出力ビームの各ビームに対応する干渉位相をモニタリングするステップと、そして第1ビーム経路におけるガスの光学特性の変化に関する情報を、モニタリングされる3つの位相に基づいて生成するステップと、を含む。  (もっと読む)
(もっと読む)
基板外観検査装置
【課題】基板の外観を高精度に検査する。
【解決手段】層の特徴部分を白色領域とし、層の非特徴部分を黒色領域として、CADデータから基板の各層の層画像データを取得する層画像データ取得部1312と、各層の層画像データを重ね合わせ、深さ方向の可視範囲内の白色領域及び黒色領域に基づいて積層構造データを作成する積層構造データ作成部1314と、基板製造データに基づいて色データベース1440から各層の特徴部分に対応する色データを取得する色データ取得部1342と、積層構造データと色データとに基づいて基板の各領域の色特徴値を表す領域色特徴データを作成する領域色特徴データ作成部1392と、基板の撮像画像データと領域色特徴データとに基づいて基板の外観を検査する検査部1394とを有する。
(もっと読む)
反応物質層の外形と反応物質の高炉への供給経路とを測定する方法
【課題】高炉内の反応物質層の外形と反応物質の供給経路とを容易に測定できるようにすること。
【解決手段】高炉内の反応物質層の外形と反応物質の供給経路とを測定する方法は、3次元レーザースキャナーを用意する第1ステップと、コンピューターを用意する第2ステップと、点群データを得る第3ステップと、前記点群データから最上の反応物質層の外形を計算する第4ステップとを含む。前記第1ステップは、内部空間のデジタルデータを示す点群データを出力するため、3次元レーザースキャナーを高炉内の反応物質層に向けることを含む。前記第2ステップは、前記3次元レーザースキャナーを、点群解析プログラムを有するコンピューターに接続することを含む。前記第3ステップは、前記点群データから前記最上の反応物質層の外形を計算するため、前記点群解析プログラムにより実行される。供給される前記反応物質の経路を測定するために少なくとも1つの2次元レーザースキャナーを用いる。
(もっと読む)
指標配置情報計測装置および方法
【課題】 指標の位置姿勢を計測するために必要な撮影に関する情報をユーザに提示する。
【解決手段】 撮影画像を取得する画像取得手段と、前記撮影画像から指標を検出する指標検出手段と、前記指標検出手段において検出された指標を同定する指標同定手段と、前記指標同定手段における同定結果から、前記指標の配置情報を算出する配置情報算出手段とを有し、前記指標同定手段における同定結果を解析する解析手段と、前記解析手段における解析結果に応じた画像を前記撮影画像上に合成して表示することにより該解析結果をユーザに提示する表示手段とを備える。
(もっと読む)
欠陥検査装置、及び欠陥検査方法
【課題】分類される欠陥の種類を増加する。
【解決手段】互いに平行な直線群を含む回路パターンが形成された被検査対象物1を載置して、直線群に直角又は平行に走行するステージ301,302,303と、長手方向が前記ステージの走行方向に対して略直角方向になるようにスリット状の光であるスリット状ビームを被検査対象物1の表面に照明し、直線群の方向とスリット状の光の光軸の被検査対象物1への投影線とが第1の傾斜角を有する照明光学系100と、被検査対象物1の反射散乱光を方位分布の違いに基づいて分類する欠陥分類手段202と、欠陥分類手段202で分類された反射散乱光をイメージセンサ295,206で検出する検出光学系200とを備えた。さらに、スリット状ビームの入射方向と平面的に対向する方向から被検査対象物に照明する他のスリット状ビームを照射する。
(もっと読む)
投射装置、投射装置の測距方法およびプログラム
【課題】空間的光変調素子を用いた投射装置の場合でも、安定した積分センサ出力信号を得られ、これを用いて、精度の高いフォーカス制御や歪み補正制御を行えるようにする。
【解決手段】センサ制御部42で、カラーホイールマーカ信号S7およびカラーホイールセグメント信号S8から、カラーホイール45の回転に同期したセンサ積分制御信号S1,S3を生成し、位相差センサ131、132で、カラーホイールの回転に同期したセンサ積分制御信号S1,S3によりセンサ出力信号を積分し、コントローラ部39で、一対のフォトセンサアレイの位相によりスクリーン上の測距点までの距離を算出して、フォーカス制御や歪み補正制御を行う。センサ積分制御信号をカラーホイールの回転に同期させると、積分されたセンサ出力信号のバラツキがなくなる。
(もっと読む)
光拡散体検査方法および装置
【課題】透過率の差が小さい複数の部材が交互に配列されている検査対象においても端部材長を正確に検査できる光拡散体検査方法および装置を提供する。
【解決手段】計測波形記憶部101は透過光の画像を記憶する。処理位置決定部102は検査の基準位置となる現在処理位置を、予め決められた検索範囲について順に検索し、検査の基準位置となる現在処理位置を決定する。特徴量J検出部110は平均変化量比率E検出部106が検出した平均変化量比率Eと部材レベル面積差比率F検出部109が検出した部材レベル面積差比率Fとを加算することにより特徴量Jを検出する。最大特徴量J検出部111は処理位置決定部102が検索する予め決められた検索範囲について特徴量J検出部110が検出した特徴量Jが最大となる位置を決定する。端部材長検出部112は最大特徴量J検出部111が検出した特徴量Jが最大となる位置より端部材長を検出する。
(もっと読む)
操舵角センサの異常判定装置
【課題】車両速度が遅い場合であれ、操舵角センサの異常の有無を高い精度で判定することができる操舵角センサの異常判定装置を提供する。
【解決手段】操舵角センサ21の異常の有無を判定する異常判定装置として、ナビゲーションシステム22の地理情報及び位置情報を参照しつつ車両がカーブ路走行中にあるカーブ路走行期間を検出するプログラムと、そのカーブ路走行期間内のセンサ出力の最大値を検出するプログラムと、その最大値について所定の閾値との対比を行うことにより該最大値が相当量に足りるかあるいは満たないかを判断するプログラムと、その判断により最大値が相当量に満たないと判断された場合に操舵角センサ21が異常である旨の判定をするプログラムと、を備える構成とする。
(もっと読む)
欠陥検査方法、欠陥検査装置、欠陥検査プログラム、このプログラムを記憶した記憶媒体
【課題】検査時間が極めて短く、作業時間、タクトタイムを短縮することが可能な線状体ないし帯状体として把握可能であり、しかも、被検体に歪みや変形がある場合でも、誤認識を防止し、正確な欠陥検出が可能な欠陥検出方法、欠陥検出装置、欠陥検出プログラムを提供する。
【解決手段】半導体ウエハのエッジ部分など、線状体ないし帯状体として認識可能な被検体画像の幅方向の輝度と画素数とを積算し、この積算値が所定の基準値以下のときに欠陥であると判断する構成の欠陥検査方法、欠陥検出装置、欠陥検出プログラムとした。
(もっと読む)
161 - 180 / 250
[ Back to top ]